T-bot
Può creare un T-bot parametrico impostando i parametri per il raggio X, il carrello e il raggio Z.
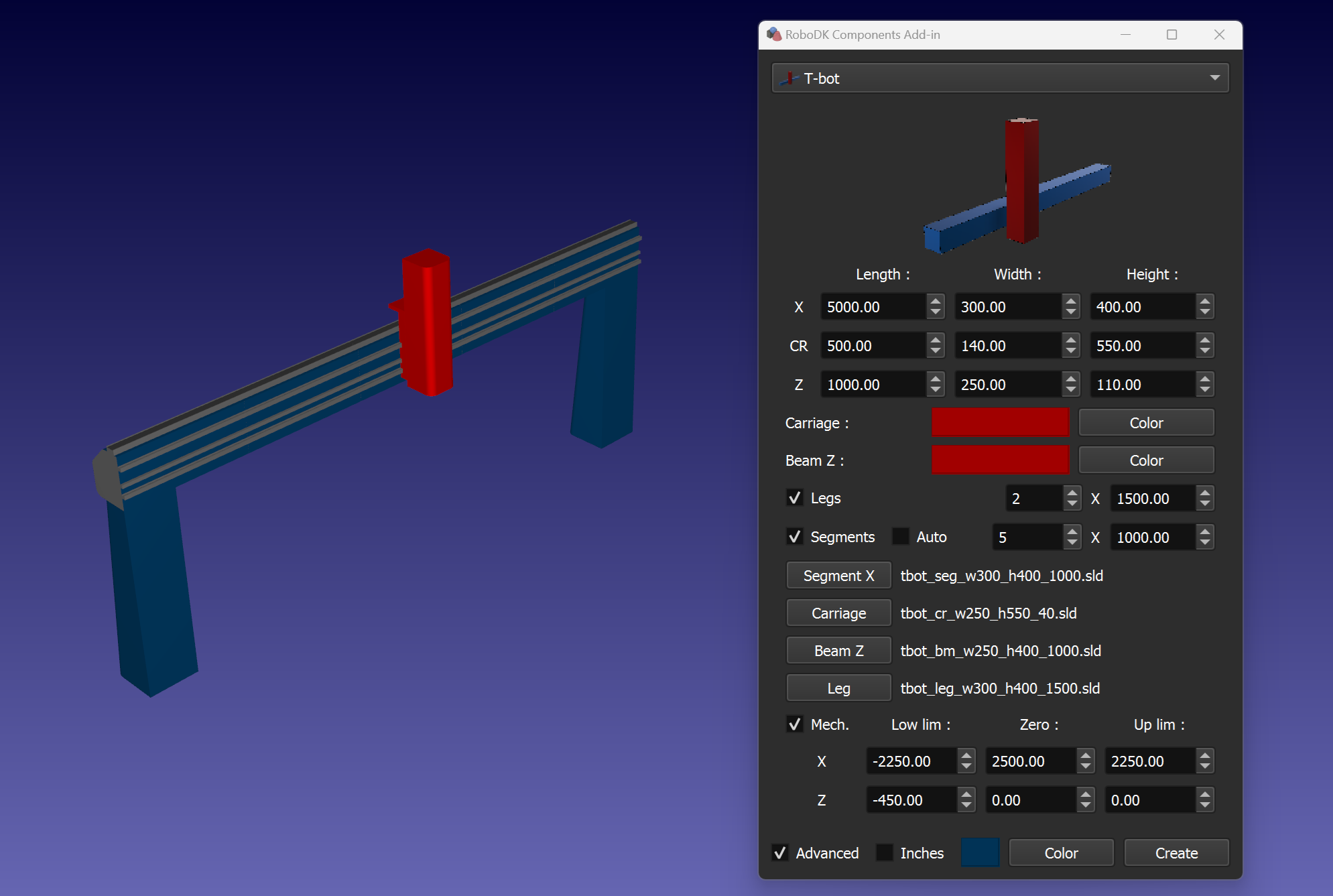
Suggerimento: può creare un robot a T con una trave X segmentata utilizzando i modelli Segmento, Trave Z e Carrello. È necessario impostare i file di modello appropriati utilizzando i pulsanti Segmento X, Carrello e Fascio Z. Si assicuri di utilizzare i valori di dimensione corretti e il numero corretto di segmenti. Utilizzi la casella di controllo Segmenti per costruire il modello di T-bot appropriato.
Suggerimento: utilizzi la casella di controllo Meccanismo per creare un meccanismo T-bot. Può inoltre impostare i limiti di movimento e la posizione zero degli assi con i parametri corrispondenti.
Nota: verifichi lo spostamento dei modelli di segmenti, trave e carrello nel caso in cui venga utilizzata l'opzione Segmenti. Ci sono diversi esempi nella cartella Modelli. Per impostazione predefinita, la cartella con gli esempi di modelli è C:\RoboDK\Addins\com.robodk.app.shape\Components\models\tbot\.
Suggerimento: utilizzi la casella di controllo Auto per impostare i parametri in base alle misurazioni del rettangolo di selezione del modello. Piccoli dettagli del modello possono influenzare il risultato della misurazione. Può deselezionare Auto dopo la misurazione e impostare i parametri manualmente.
Suggerimento: utilizzi la casella Gambe per aggiungere il numero richiesto di colonne di base dell'altezza specificata.