L'Add-in Componenti per RoboDK aggiunge gli strumenti necessari per creare componenti visivi (oggetti e meccanismi 3D) nel software RoboDK.
Il RoboDK Components Add-in le permette anche di definire le dimensioni e i parametri di configurazione dei Componenti che crea. È disponibile un'anteprima per verificare che il risultato sia corretto
Può impostare qualsiasi colore e trasparenza per i Componenti che intende creare.
Questa sezione illustra le funzioni di base dei Componenti Add-in.
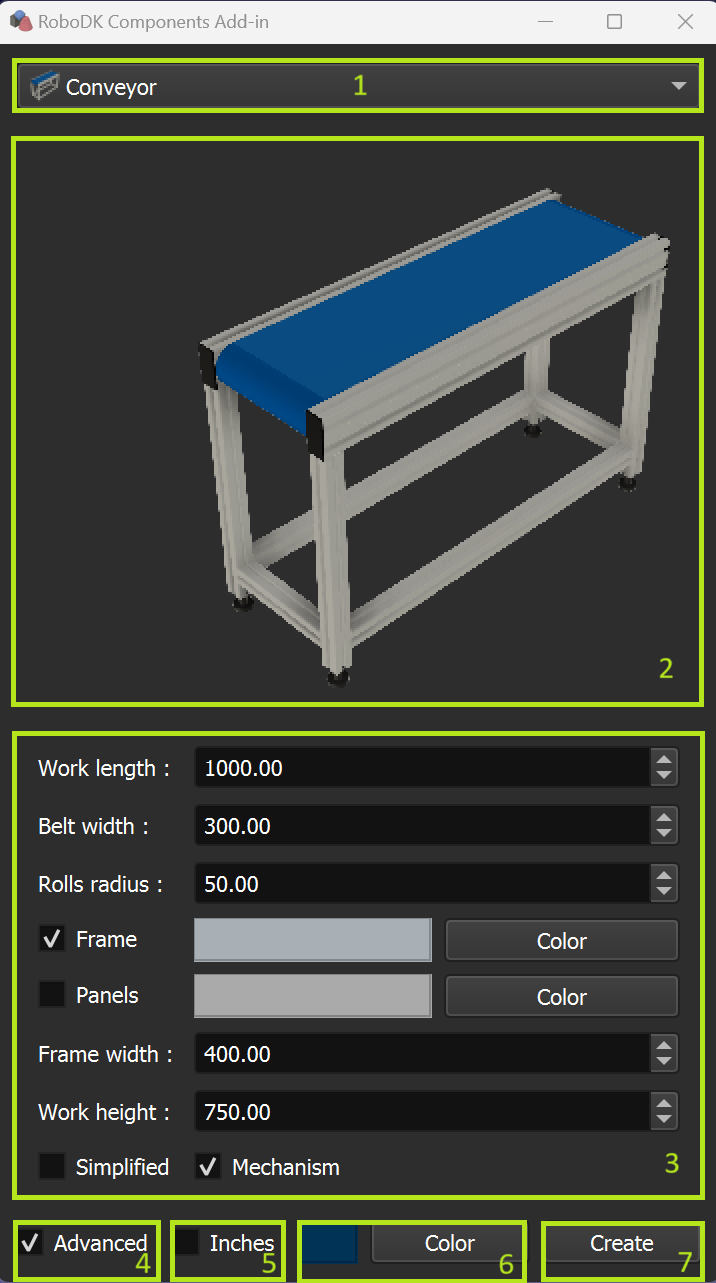
La finestra Componenti Add-in contiene i seguenti elementi funzionali:
1.Area elenco per la selezione dei Componenti
2.Schizzo del componente
3.Area parametri del componente selezionato
4.Casella di controllo della visibilità delle opzioni avanzate
5.Casella di controllo per utilizzare i pollici (i millimetri sono utilizzati per impostazione predefinita).
6.Selezione del colore e della trasparenza
7.Creazione di componenti
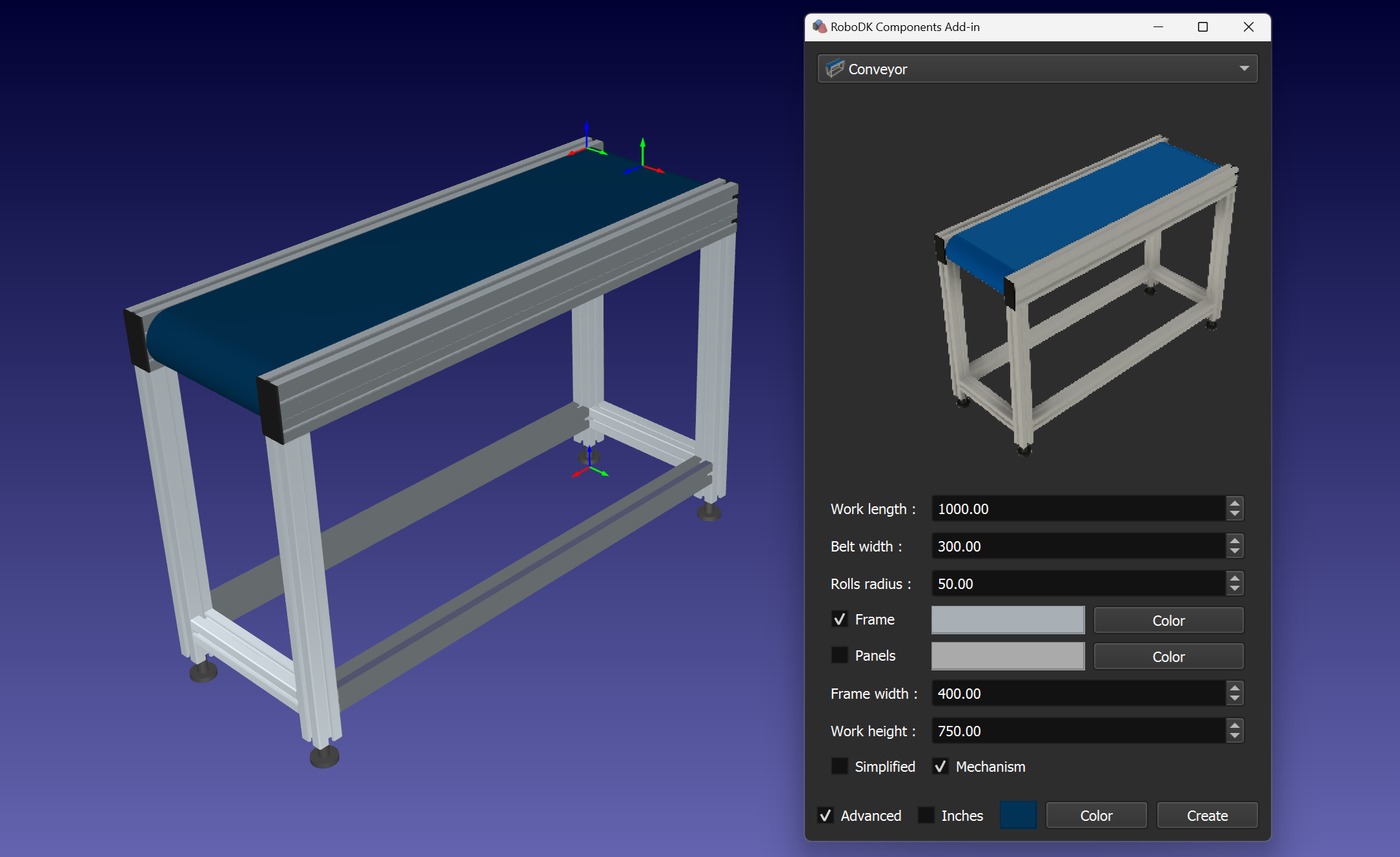
Convogliatore
Può creare un trasportatore specificando le dimensioni del trasportatore.
Suggerimento: utilizzi la casella di controllo Cornice con i valori di dimensione appropriati e la finestra di dialogo Colore per aggiungere una cornice per trasportatori.
Suggerimento: utilizzi la casella di controllo Pannelli e la corrispondente finestra di dialogo Colore per aggiungere i pannelli della cornice con il colore e la trasparenza specificati.
Suggerimento: utilizzi la casella di controllo Semplificato per passare dalla cornice semplificata a quella realistica.
Suggerimento: utilizzi la casella Meccanismo per creare un meccanismo di trasporto.
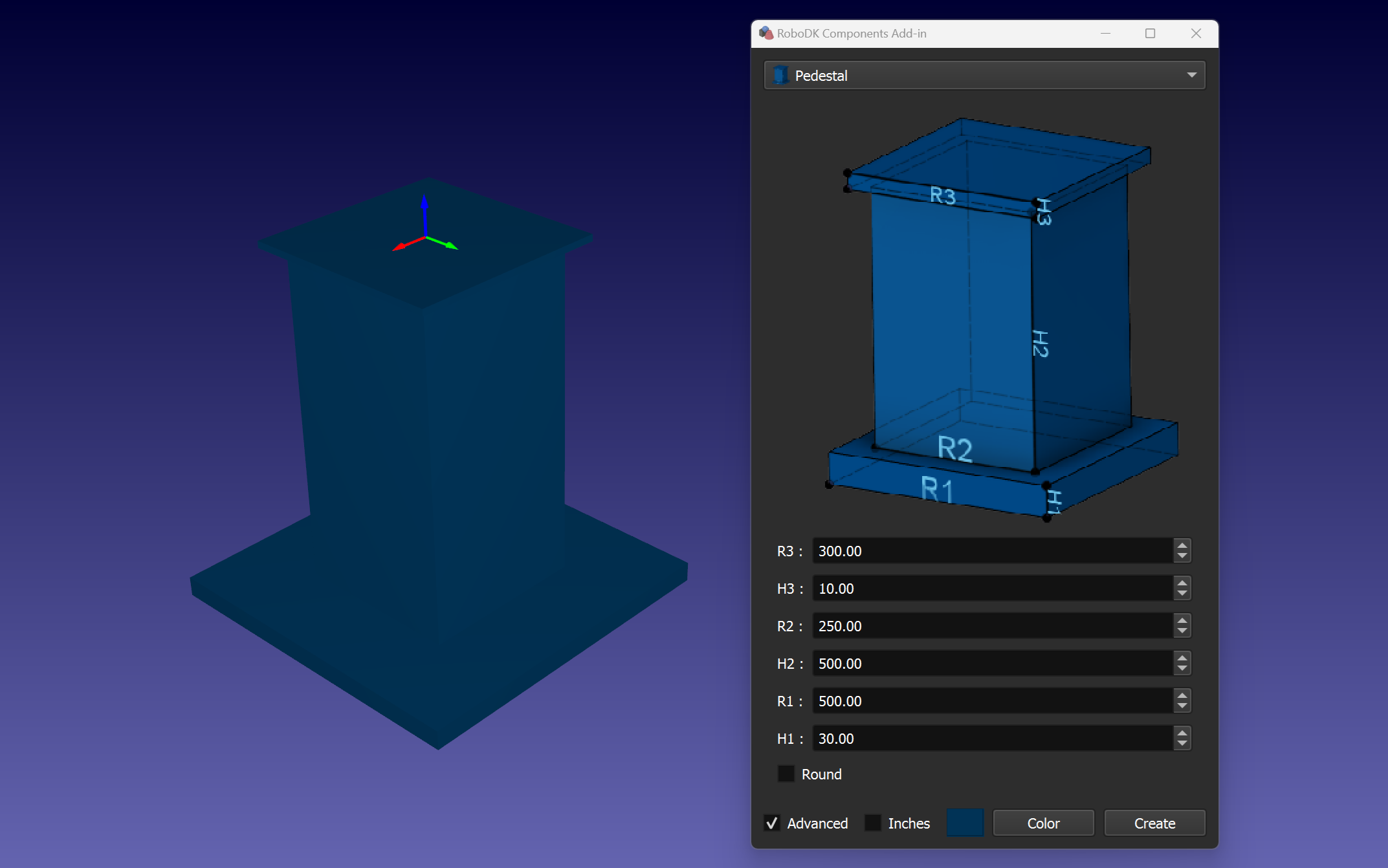
Piedistallo
Può creare un piedistallo specificando le dimensioni (R1, R2, R3, H1, H2, H3).
Suggerimento: utilizzi la casella di controllo Rotondo per creare un basamento cilindrico.
Suggerimento: Una cornice creata in aggiunta, denominata Pedestal N Plane Frame, può essere utile per posizionare gli oggetti necessari al centro del piano superiore del seminterrato.
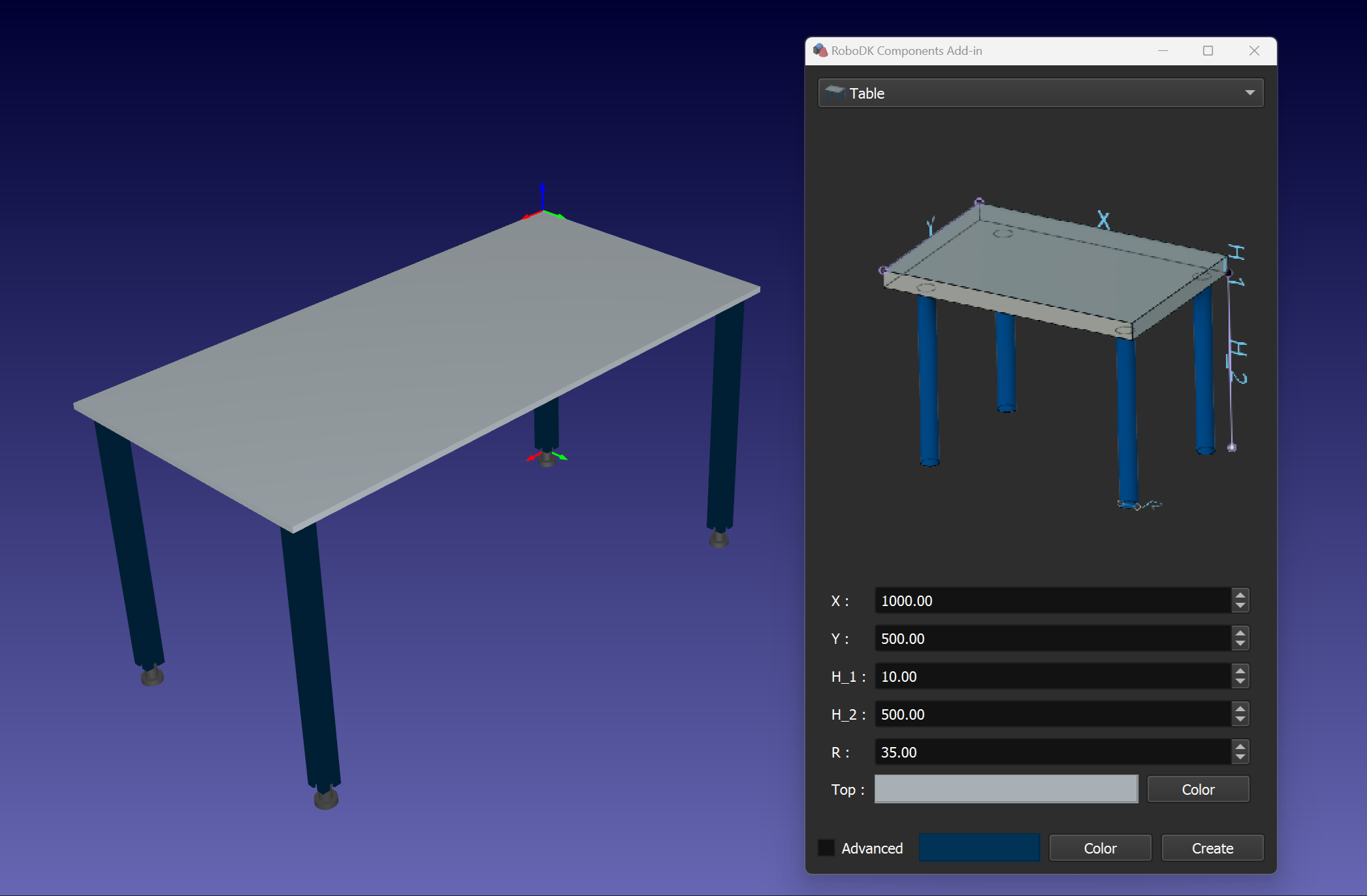
Tabella
Può creare una tabella specificando le dimensioni (X, Y, R, H1, H2).
Suggerimento: utilizzi la finestra di dialogo Colore per impostare il colore e la trasparenza della superficie superiore del tavolo.
Suggerimento: Una cornice creata in aggiunta, chiamata Cornice del piano del tavolo N, può essere utile per posizionare gli oggetti necessari sulla superficie superiore del tavolo.
Suggerimento: utilizzi la casella di controllo Semplificato per alternare tra gambe del tavolo semplificate e realistiche.
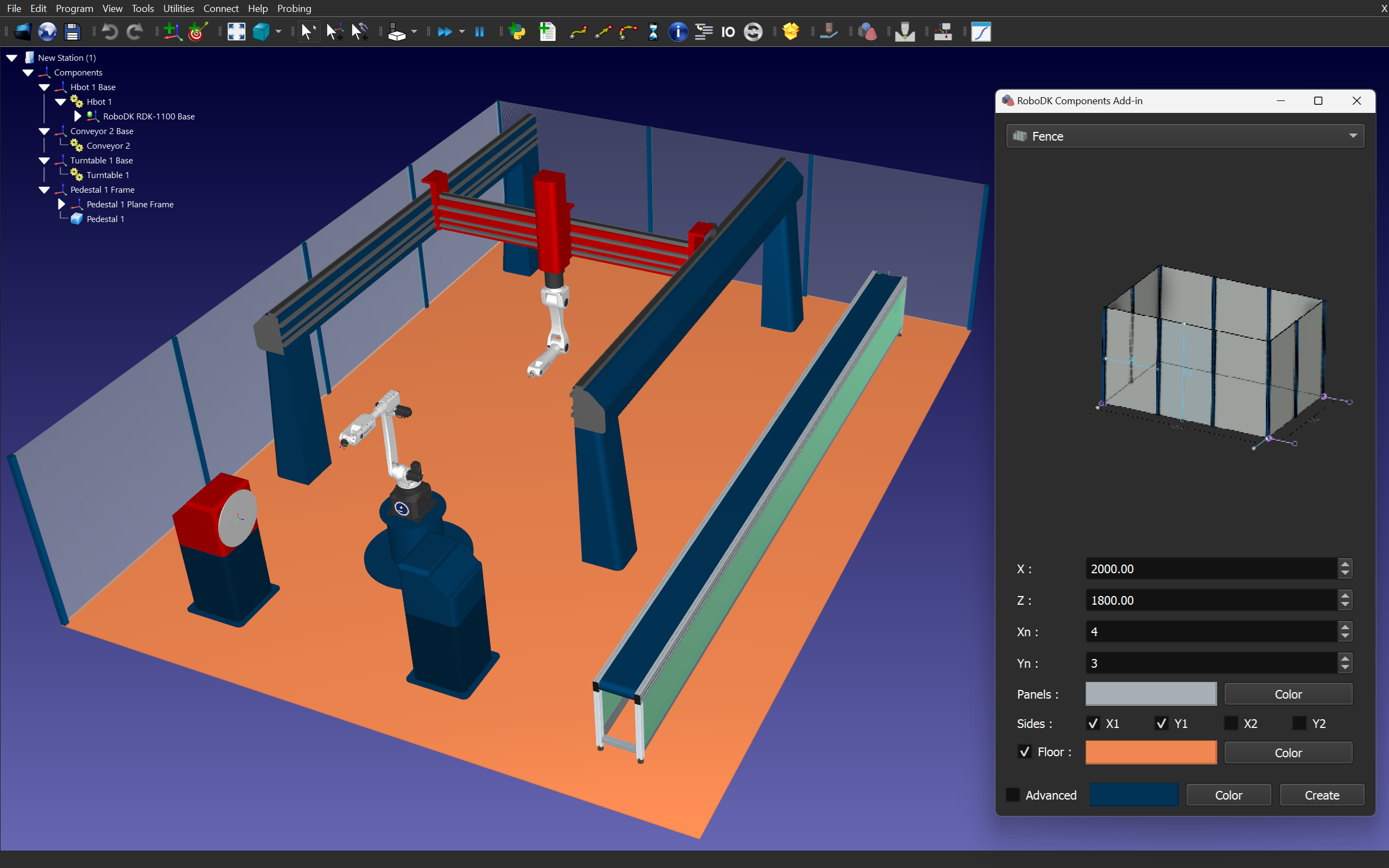
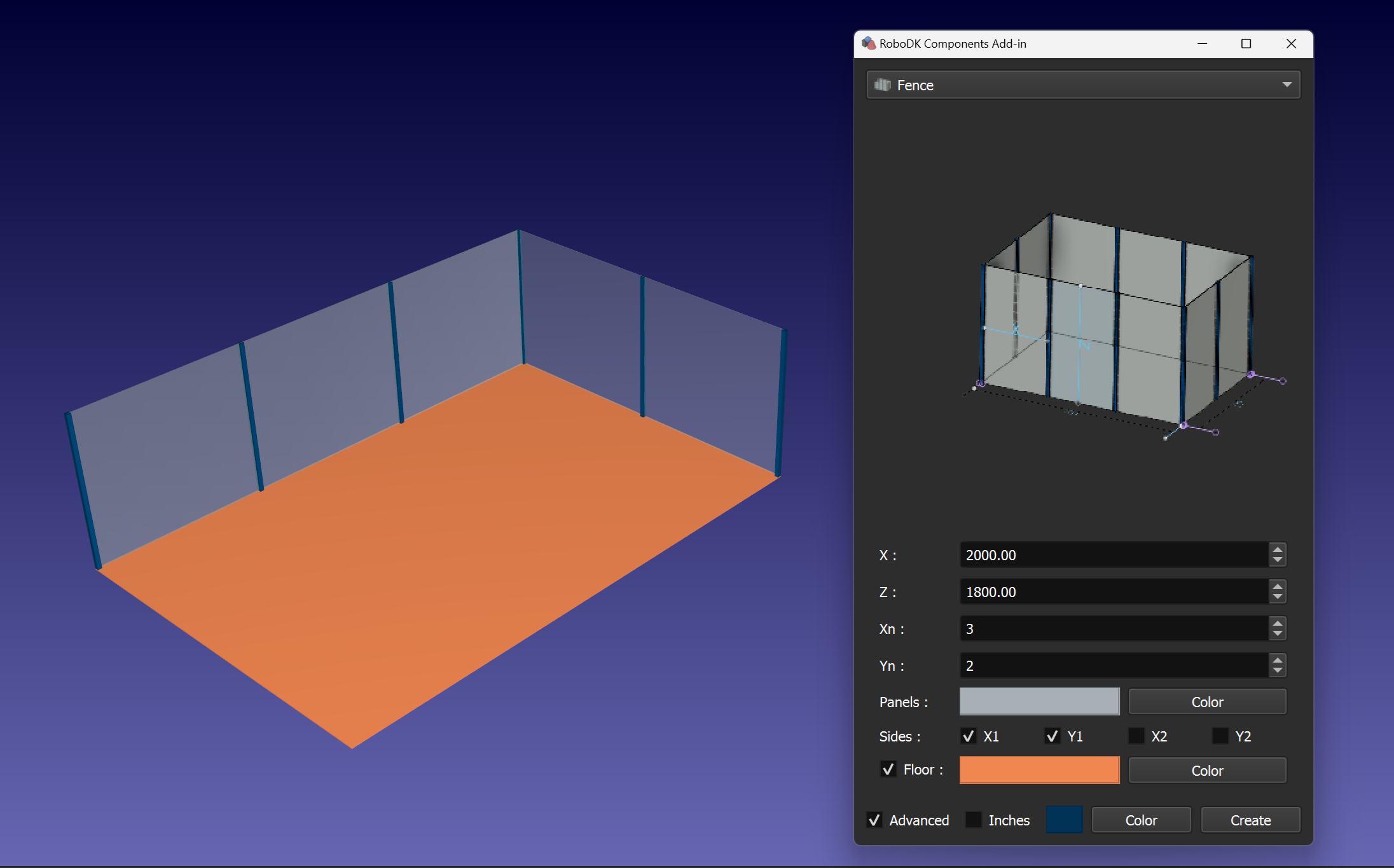
Recinto
Può creare una recinzione specificando le dimensioni dei pannelli (X, Z) e il numero di sezioni (Xn, Yn).
Suggerimento: utilizzi la finestra di dialogo Colore per impostare il colore e la trasparenza dei pannelli della recinzione.
Suggerimento: utilizzi la casella di controllo Pavimento e la corrispondente finestra di dialogo Colore per aggiungere il pavimento con il colore e la trasparenza specificati.
Suggerimento: può cambiare la configurazione del recinto azionando le caselle di controllo X1, X2, Y1 e Y2.
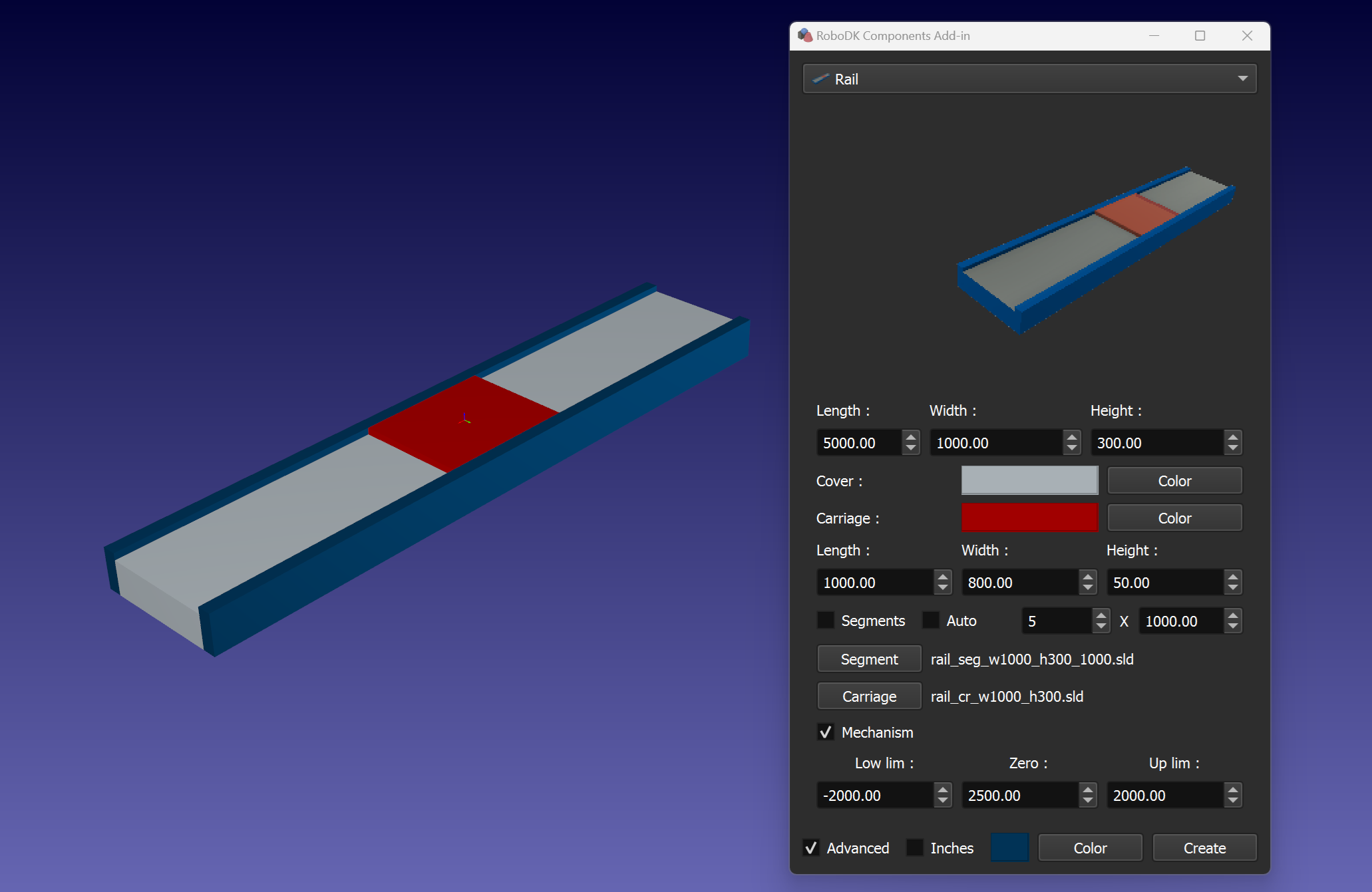
Rotaia
Può creare un binario specificando parametri come la lunghezza, la larghezza, l'altezza e il colore della base del binario e del carrello.
Suggerimento: può creare una rotaia segmentata utilizzando i modelli dei segmenti di base e del carrello. È necessario impostare i file di modello corrispondenti utilizzando i pulsanti Segmento e Carrello. Si assicuri di utilizzare i valori dimensionali corretti e il numero giusto di segmenti. Utilizzi la casella di controllo Segmenti per creare il modello di rotaia corrispondente.
Suggerimento: utilizzi la casella di controllo Meccanismo per creare un meccanismo a binario. Può inoltre impostare i limiti di movimento e la posizione zero del carrello con i parametri corrispondenti.
Nota: verifichi lo spostamento dei segmenti e dei modelli di carrello nel caso in cui venga utilizzata l'opzione Segmenti. Ci sono diversi esempi nella cartella Modelli. Per impostazione predefinita, la cartella con gli esempi di modelli è C:\RoboDK\Addins\com.robodk.app.shape\Components\models\rail\.
Suggerimento: utilizzi la casella di controllo Auto per impostare i parametri in base alle misurazioni del rettangolo di selezione del modello. Piccoli dettagli del modello possono influenzare il risultato della misurazione. Può deselezionare Auto dopo la misurazione e impostare i parametri manualmente.
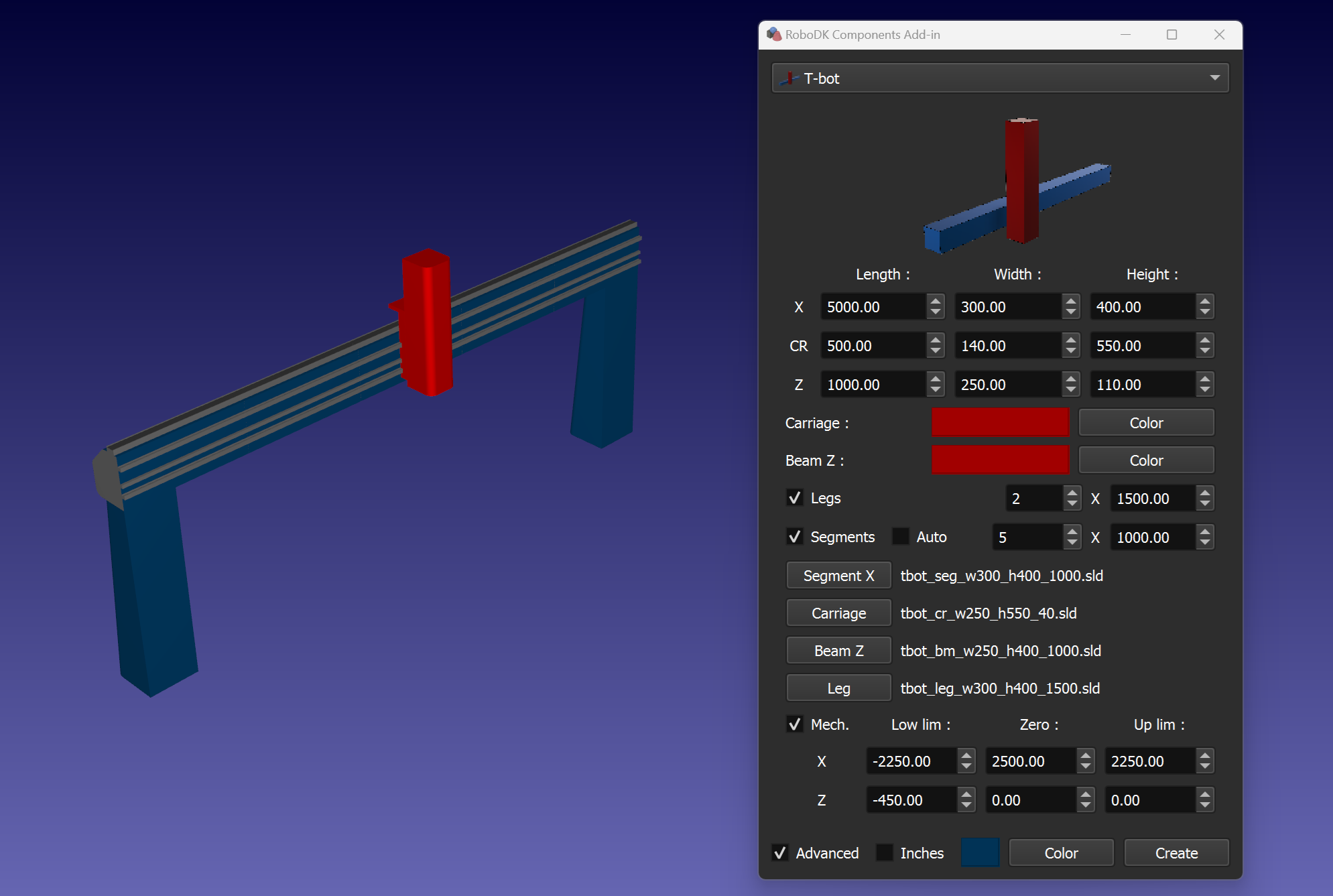
T-bot
Può creare un T-bot parametrico impostando i parametri per il raggio X, il carrello e il raggio Z.
Suggerimento: può creare un robot a T con una trave X segmentata utilizzando i modelli Segmento, Trave Z e Carrello. È necessario impostare i file di modello appropriati utilizzando i pulsanti Segmento X, Carrello e Fascio Z. Si assicuri di utilizzare i valori di dimensione corretti e il numero corretto di segmenti. Utilizzi la casella di controllo Segmenti per costruire il modello di T-bot appropriato.
Suggerimento: utilizzi la casella di controllo Meccanismo per creare un meccanismo T-bot. Può inoltre impostare i limiti di movimento e la posizione zero degli assi con i parametri corrispondenti.
Nota: verifichi lo spostamento dei modelli di segmenti, trave e carrello nel caso in cui venga utilizzata l'opzione Segmenti. Ci sono diversi esempi nella cartella Modelli. Per impostazione predefinita, la cartella con gli esempi di modelli è C:\RoboDK\Addins\com.robodk.app.shape\Components\models\tbot\.
Suggerimento: utilizzi la casella di controllo Auto per impostare i parametri in base alle misurazioni del rettangolo di selezione del modello. Piccoli dettagli del modello possono influenzare il risultato della misurazione. Può deselezionare Auto dopo la misurazione e impostare i parametri manualmente.
Suggerimento: utilizzi la casella Gambe per aggiungere il numero richiesto di colonne di base dell'altezza specificata.
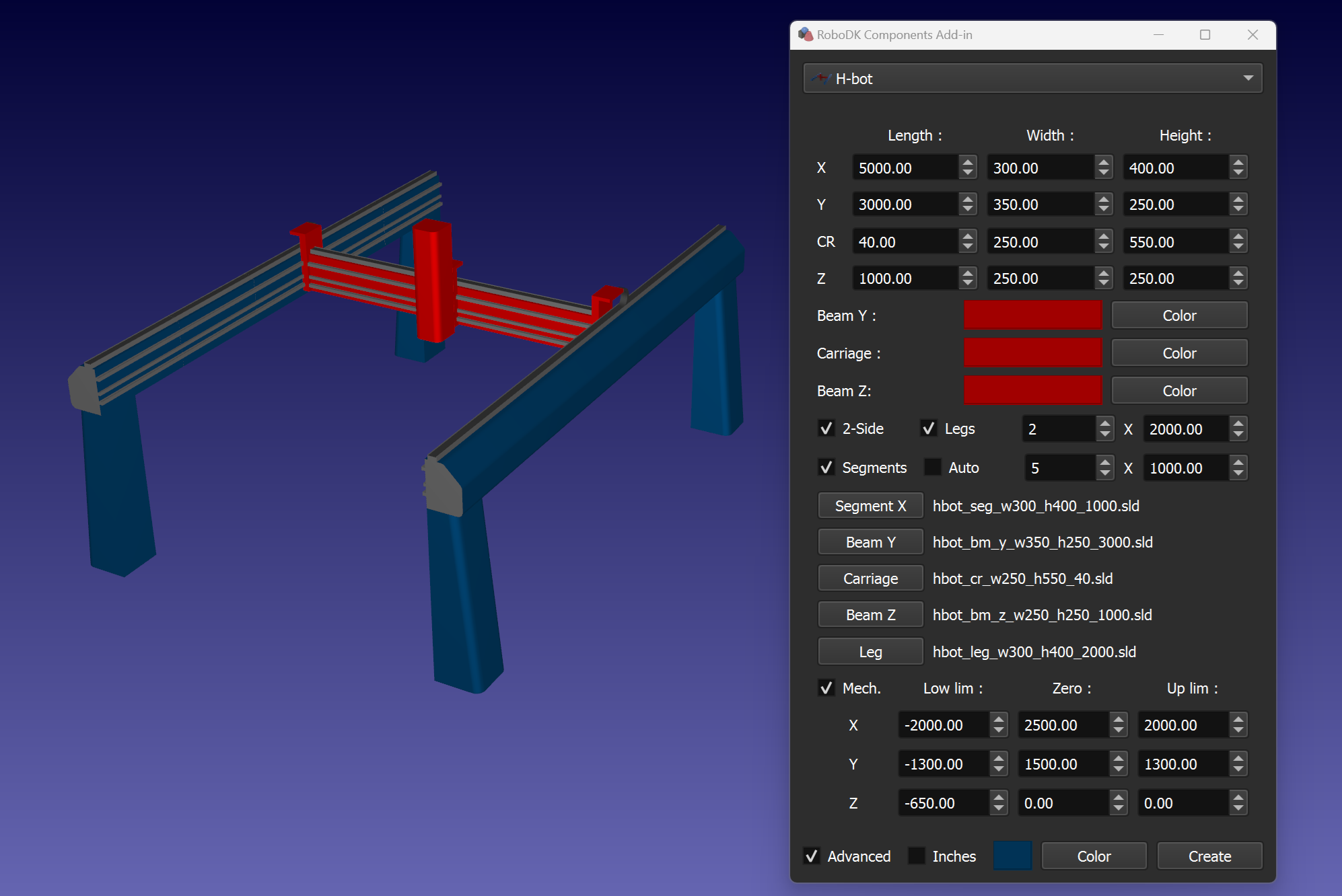
H-bot
Può creare un robot H parametrico impostando i parametri per il raggio X, il raggio Y, il carrello e il raggio Z.
Suggerimento: può creare un robot H con una trave X segmentata utilizzando i modelli Segmento, Trave Y, Trave Z e Carrello. È necessario impostare i file di modello appropriati utilizzando i pulsanti Segmento X, Fascio Y, Carrello e Fascio Z. Si assicuri di utilizzare i valori di dimensione corretti e il numero corretto di segmenti. Utilizzi la casella di controllo Segmenti per costruire il modello H-bot appropriato.
Suggerimento: utilizzi la casella di controllo Meccanismo per creare un meccanismo H-bot. Può inoltre impostare i limiti di movimento e la posizione zero degli assi con i parametri corrispondenti.
Nota: verifichi lo spostamento dei modelli di segmenti, trave e carrello nel caso in cui venga utilizzata l'opzione Segmenti. Ci sono diversi esempi nella cartella Modelli. Per impostazione predefinita, la cartella con gli esempi di modelli è C:\RoboDK\Addins\com.robodk.app.shape\Components\models\hbot\.
Suggerimento: utilizzi la casella di controllo Auto per impostare i parametri in base alle misurazioni del rettangolo di selezione del modello. Piccoli dettagli del modello possono influenzare il risultato della misurazione. Può deselezionare Auto dopo la misurazione e impostare i parametri manualmente.
Suggerimento: utilizzi la casella Gambe per aggiungere il numero richiesto di colonne di base dell'altezza specificata.
Suggerimento: utilizzi la casella 2-Side per aggiungere una trave a X speculare.
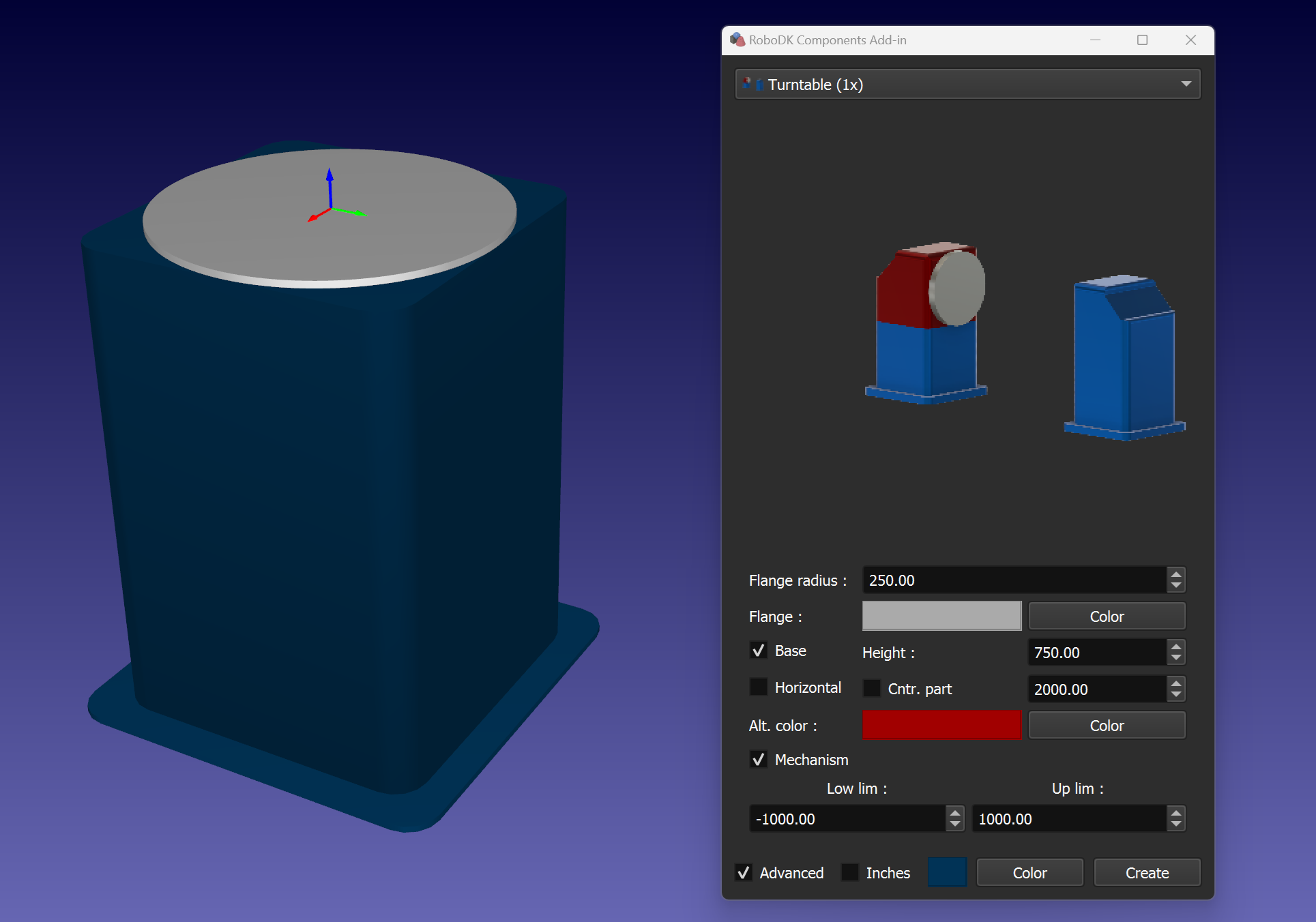
Giradischi (1x)
Può creare una piattaforma girevole specificando parametri quali il raggio della flangia, l'altezza della base e i colori della base e della flangia.
Suggerimento: utilizzi la casella di controllo Base e il parametro Altezza per creare il corpo del posizionatore.
Suggerimento: può creare un posizionatore orizzontale o verticale selezionando la casella Orizzontale. Inoltre, può utilizzare la casella Cntr. parte e il parametro offset corrispondente, se è necessaria una controparte.
Suggerimento: utilizzi la casella di controllo Meccanismo per creare un meccanismo di tavola girevole. Può inoltre impostare i limiti di movimento con i parametri corrispondenti.
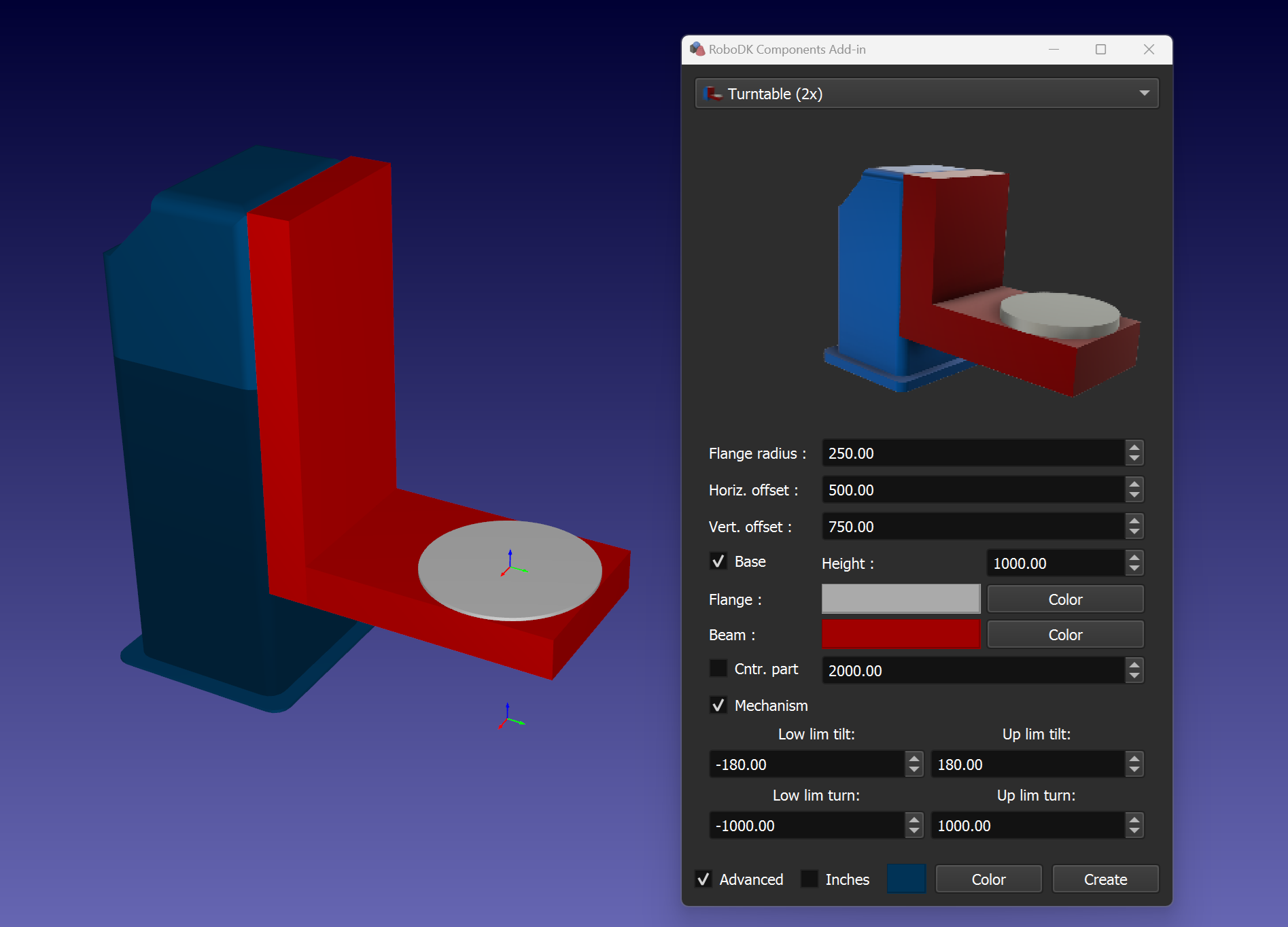
Giradischi (2x)
Può creare una piattaforma girevole inclinabile specificando parametri come il raggio della flangia, gli offset verticali e orizzontali, l'altezza della base e i colori della base, della trave e della flangia.
Suggerimento: utilizzi la casella di controllo Base e il parametro Altezza per creare il basamento del posizionatore.
Suggerimento: può utilizzare la casella di controllo Cntr. parte e il parametro offset corrispondente se è necessaria una controparte.
Suggerimento: utilizzi la casella di controllo Meccanismo per creare un meccanismo di piattaforma girevole inclinabile. Può inoltre impostare i limiti di movimento con i parametri corrispondenti.
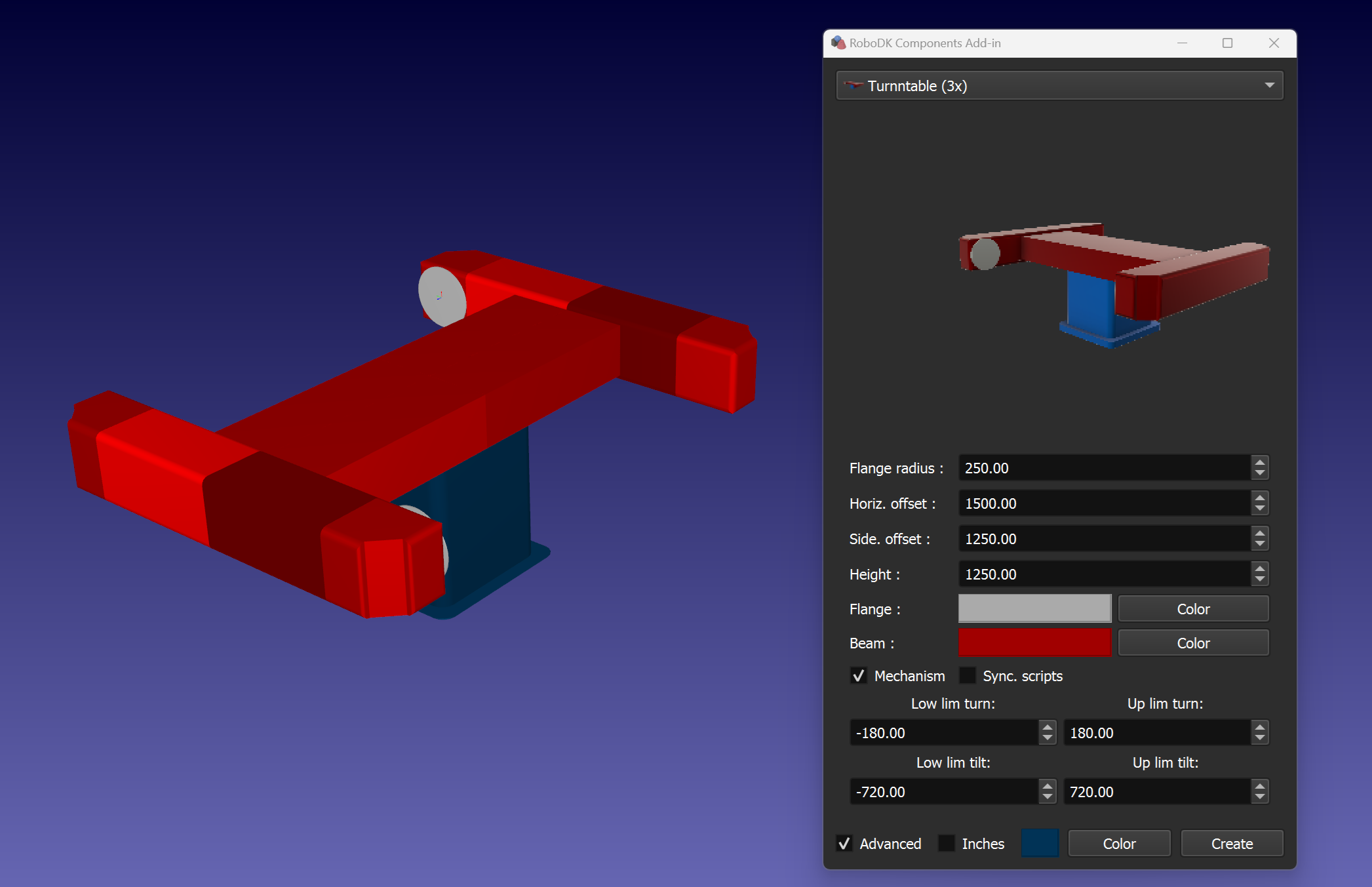
Giradischi (3x)
Può creare un posizionatore a 3 assi specificando parametri come il raggio della flangia, gli offset laterali e orizzontali, l'altezza e i colori della base, della trave e delle flange.
Suggerimento: utilizzi la casella di controllo Meccanismo per creare un meccanismo posizionatore a 3 assi. Può inoltre impostare i limiti di movimento con i parametri corrispondenti.
Suggerimento: utilizzi la casella di controllo Script di sincronizzazione per creare script Python aggiuntivi che sincronizzeranno il robot con l'asse orizzontale richiesto eseguendo lo script corrispondente.
Nota: per impostazione predefinita, la cartella C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ è quella che contiene gli esempi di script di sincronizzazione.
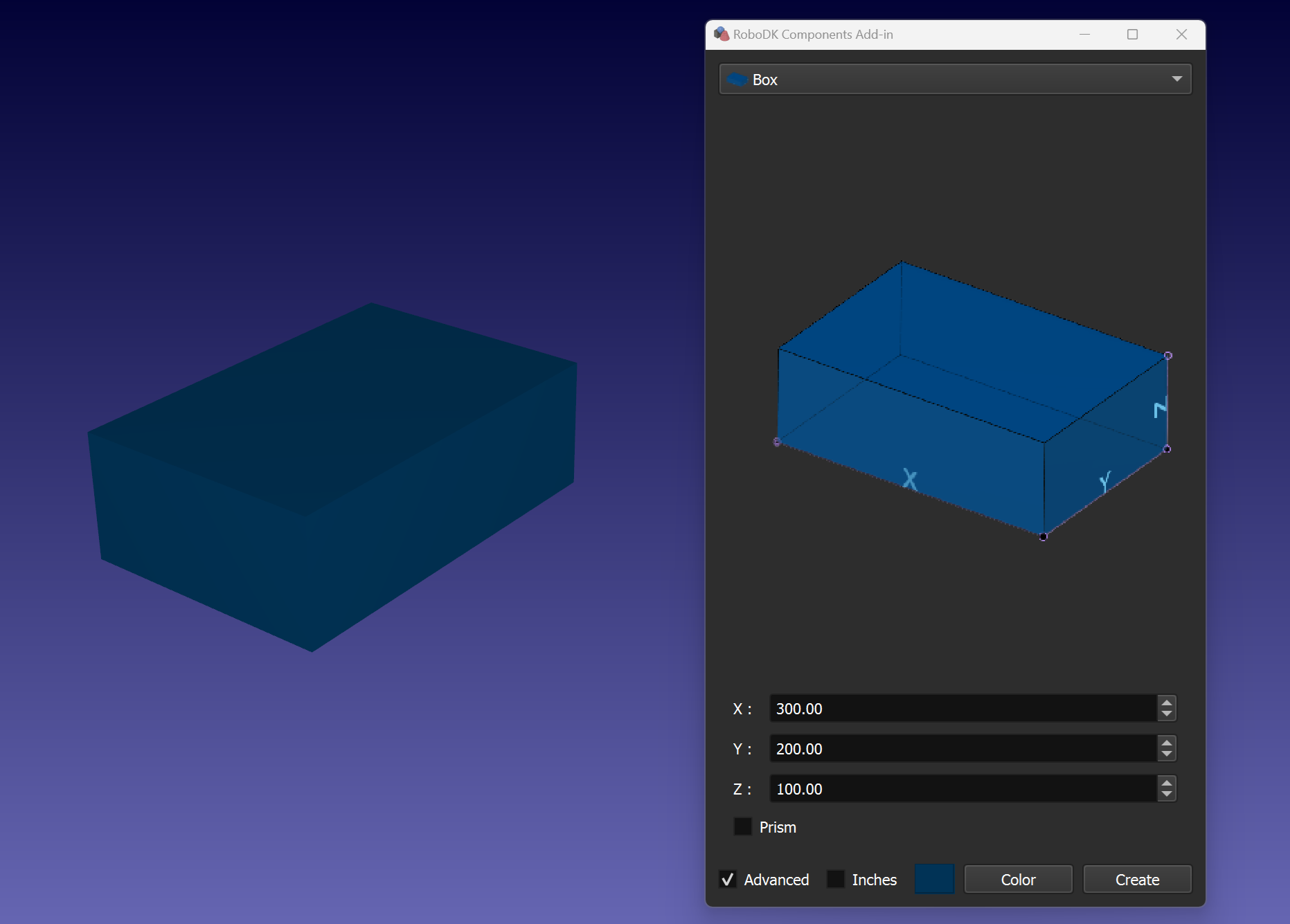
Box
Può creare un riquadro specificando le dimensioni (X, Y, Z).
Suggerimento: utilizzi la casella Prisma per creare un prisma.
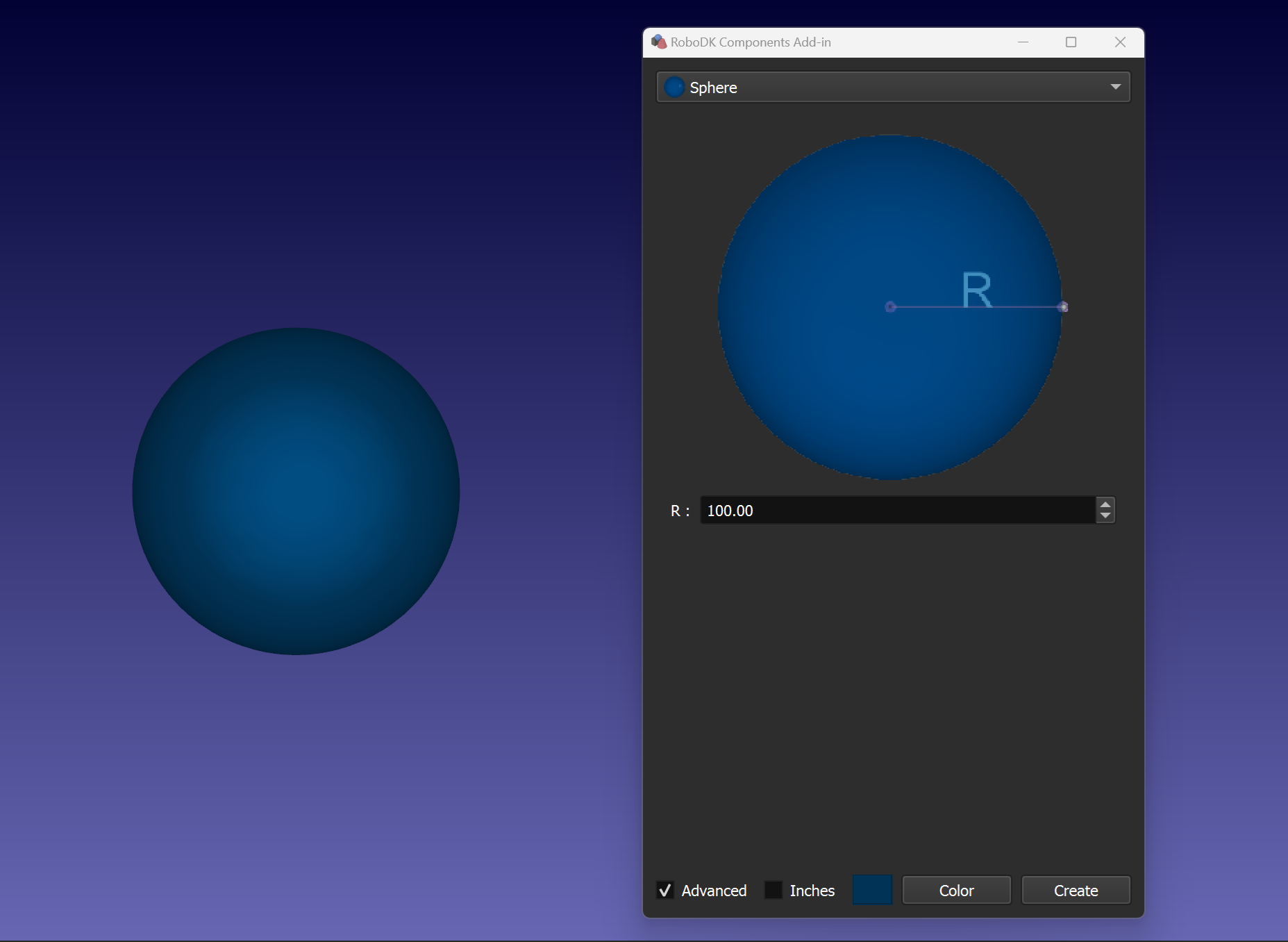
Sfera
Può creare una sfera specificando il raggio (R).
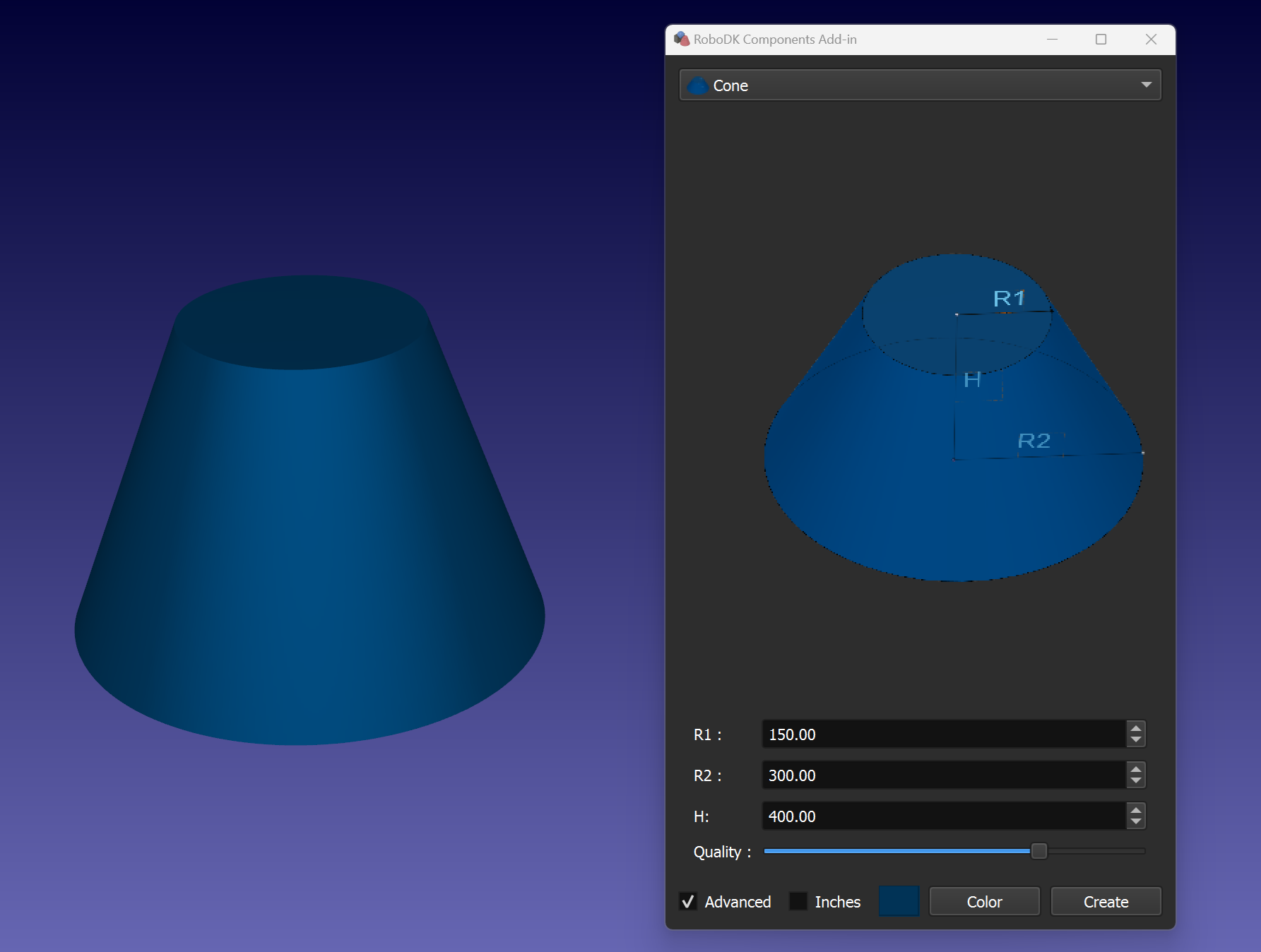
Cono
Può creare un cono specificando le dimensioni (R1, R2, H) e i parametri di qualità.
Suggerimento: se R1 è uguale a R2, verrà creato un cilindro.