Importa il marcatore
Deve importare il marcatore in RoboDK per indicare la posizione del marcatore rispetto al robot e agli altri oggetti.
Segua questi passaggi per posizionare correttamente il marcatore:
1.Nella sua stazione RoboDK, crei un nuovo piano di riferimento.
2.Clicchi con il tasto destro del mouse sul nuovo piano di riferimento e selezioni "Aggiungi elemento...".
3.Trovi e selezioni il marcatore PNG creato con il Generatore di marcatori fiduciali.
4.Regola la scala del marcatore virtuale in modo che corrisponda alle dimensioni del marcatore reale:
Esempio: il marcatore Charuco Diamond ha dimensioni predefinite di 106,186 mm x 106,186 mm: Il marcatore Charuco Diamond ha dimensioni predefinite di 106,186 mm x 106,186 mm. Se le dimensioni del marcatore stampato sono 280 mm x 280 mm, è necessario applicare un fattore di scala di 2,63688 → ( 280 / 106,186 ). Questo può essere fatto facendo doppio clic sull'oggetto marcatore, selezionando Altre opzioni à Applica scala.
5.Allinea il centro del marcatore all'origine del piano di riferimento, con l'asse Y che punta all'ID superiore.
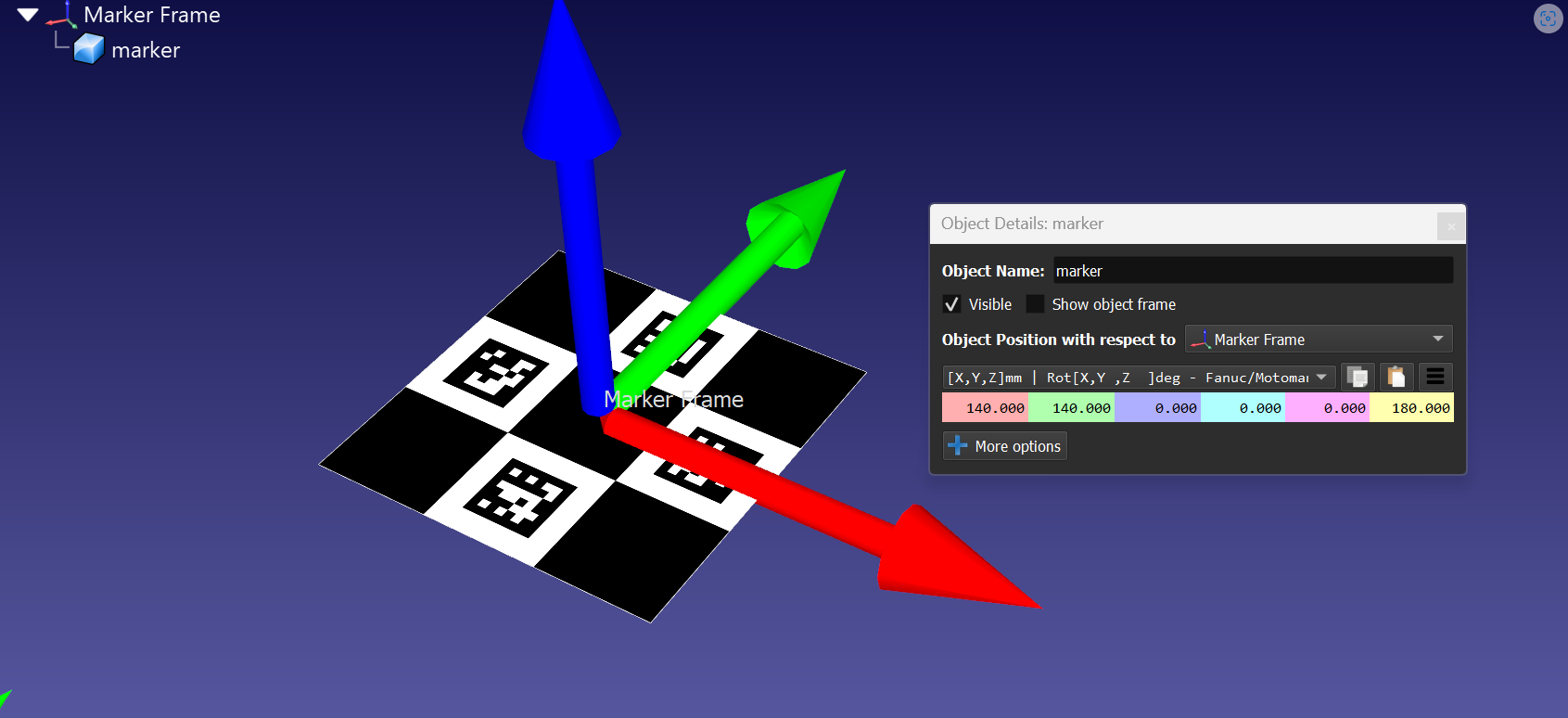
Esempio: per spostare il marcatore: Per spostare il marcatore, faccia doppio clic sull'oggetto marcatore e modifichi la posizione dell'oggetto rispetto alla cornice del marcatore. Per il nostro esempio, il marcatore doveva essere spostato di 140 mm su X, 140 mm su Y e ruotato di 180° sull'asse Z. Veda l'immagine qui sotto per un esempio della posizione corretta.
6.Posizionare la cornice del marcatore nella stazione per allineare gli oggetti della stazione rispetto al marcatore.