Impostare la telecamera simulata
Per sovrapporre accuratamente gli asset della stazione al feed video, è necessario creare una telecamera simulata. Questa telecamera simulata utilizza la posa e la traiettoria della telecamera calcolata con i marcatori fiduciali per registrare la stazione RoboDK dalla stessa angolazione, distanza e traiettoria del feed video di ingresso.
La risoluzione di questa telecamera simulata deve corrispondere al video di ingresso, affinché la scalatura del marcatore sia accurata. I passaggi per aggiungere una telecamera virtuale alla stazione sono illustrati di seguito:
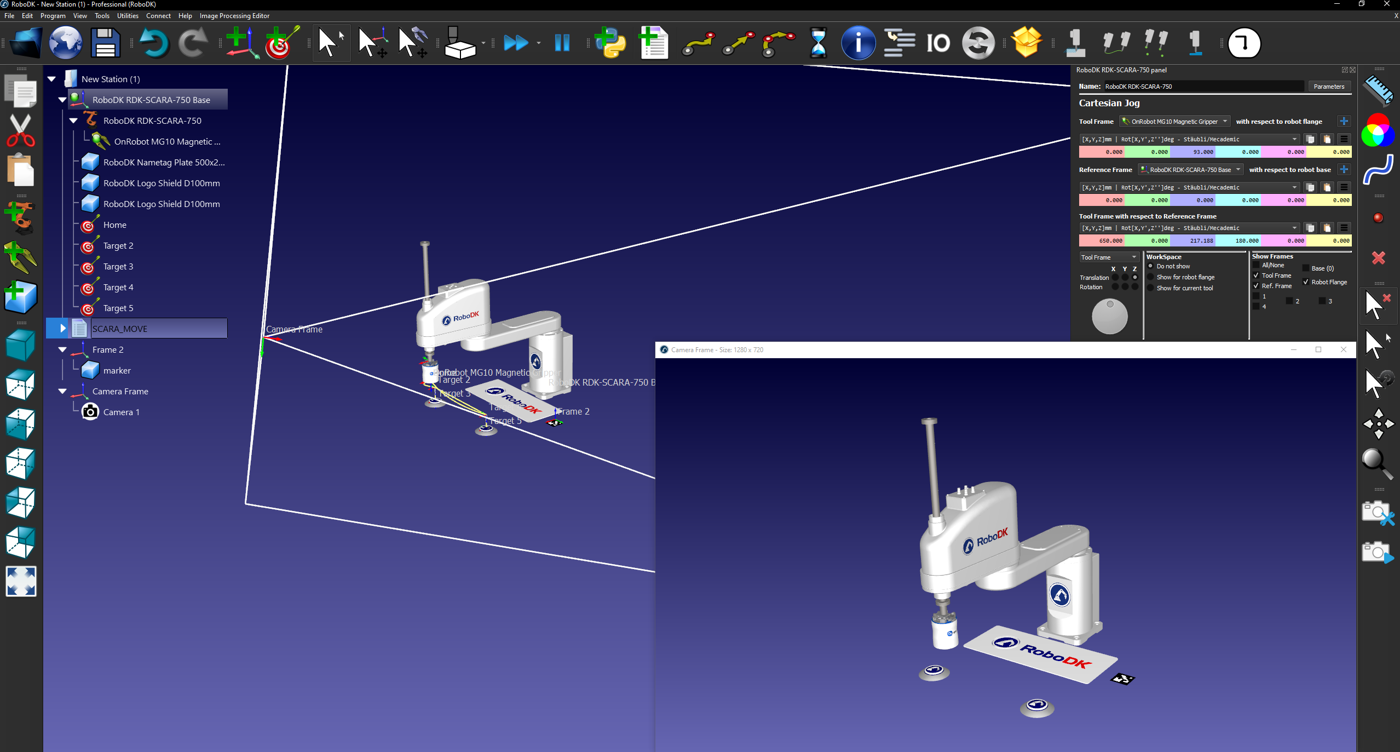
1.Aggiunga una telecamera alla sua stazione selezionando Editor di elaborazione immagini à Aggiungi una telecamera RoboDK nella barra degli strumenti.
2.Clicchi con il tasto destro del mouse sulla telecamera o sul feed della telecamera e selezioni "Impostazioni della telecamera".
3.Regoli le impostazioni della telecamera virtuale in modo che corrispondano alla risoluzione del feed video in ingresso.
4.Allinea il piano di riferimento in modo che la telecamera simulata possa vedere il marcatore Aruco virtuale.
Per ottenere risultati ottimali, il video di ingresso fisico deve essere registrato tenendo conto delle seguenti considerazioni:
1.Posizionare il marcatore su una superficie piana in un ambiente ben illuminato. Per ottenere risultati ottimali, consideri le dimensioni e la distanza degli oggetti nella stazione virtuale rispetto al marker e all'ambiente di registrazione.
2.Impostazioni della telecamera coerenti (le telecamere reali e simulate devono avere impostazioni di risoluzione corrispondenti).
3.Documenti d'identità Aruco leggibili (la telecamera deve mantenere leggibili i documenti d'identità. Cose da evitare: Riprese veloci/sfocate, bassa risoluzione della telecamera, elevata distanza del marcatore dalla telecamera).
4.Si assicuri che il video sia in formato .mp4 o .avi