Piani di Riferimento
Un Piano di Riferimento definisce la posizione di un elemento con rispetto di un altro, con posizione e orientamento dati. Un elemento può essere un oggetto, un robot, o un altro piano di riferimento. Tutti i Programmi Offline necessitano della definizione di un piano di riferimento per localizzare l'oggetto con rispetto di un robot e aggiornare propriamente la simulazione.
Trascina un piano di riferimento o un oggetto nell'Albero della Stazione per definire una specifica relazione, come il piano di riferimento ramificato della seguente immagine.
È comune definire la posizione di uno o più piani di riferimento con rispetto del robot toccando 3 punti. Ciò permette di posizionare oggetti nello spazio virtuale. Questa procedura può essere compiuta utilizzando il teach pendant o RoboDK (più informazioni disponibili nella sezione Calibrazione Piano di Riferimento)
Con RoboDK è possibile inserire manualmente i valori di traslazione e rotazione, inclusi diversi ordini di rotazione degli angoli di Eulero.
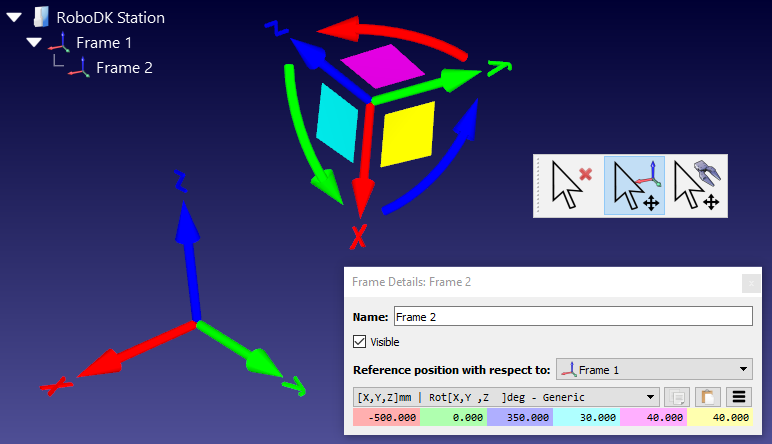
Di default, RoboDK visualizza la relazione come una posizione XYZ e angoli di Eulero nel formato X➔Y➔Z.
Ciò significa che la rotazione è compiuta nel seguente ordine:
1.Primo: rotazione attorno all'asse X (colore azzurro).
2.Secondo: rotazione attorno all'asse Y statico (colore rosa).
3.Terzo: rotazione attorno all'asse Z statico (colore giallo).
I controllori Fanuc e Motoman usano il formato precedentemente descritto, tuttavia, gli altri produttori di robot gestiscono gli ordini di rotazione in maniera differente.
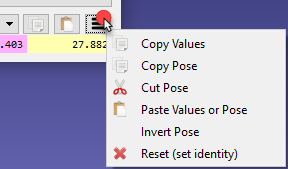
È possibile selezionare fra i diversi formati di orientamento dal menù a tendina della finestra dettagli piano di riferimento (doppio click sul piano di riferimento).
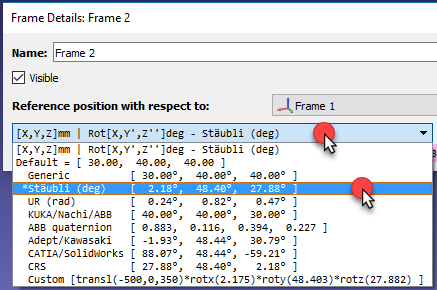
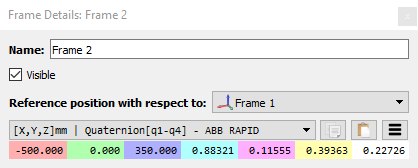
Per esempio, i robot Staubli usano l'ordine X➔Y’➔Z’’, o KUKA e Nachi usano Z➔Y’➔X’’. D'altro canto i controllori ABB usano valori Quaternione, che richiedono 4 valori per definire la rotazione:
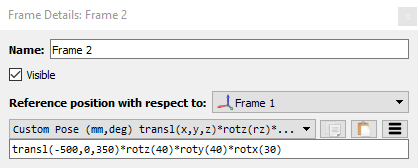
È anche possibile inserire manualmente un formato personalizzato. Per esempio, il seguente comando è visualizzato quando l'opzione Custom è selezionata: