Collegare il robot
Utilizzare la freccia giù sul pulsante Collega robot per visualizzare un menu dei robot disponibili e collegare la simulazione a uno di essi. Se il pulsante è selezionato (il robot è collegato), premendolo si disconnetterà il robot dalla simulazione.
Il collegamento tra il robot e la simulazione può essere effettuato anche utilizzando il menu contestuale nell'albero della stazione.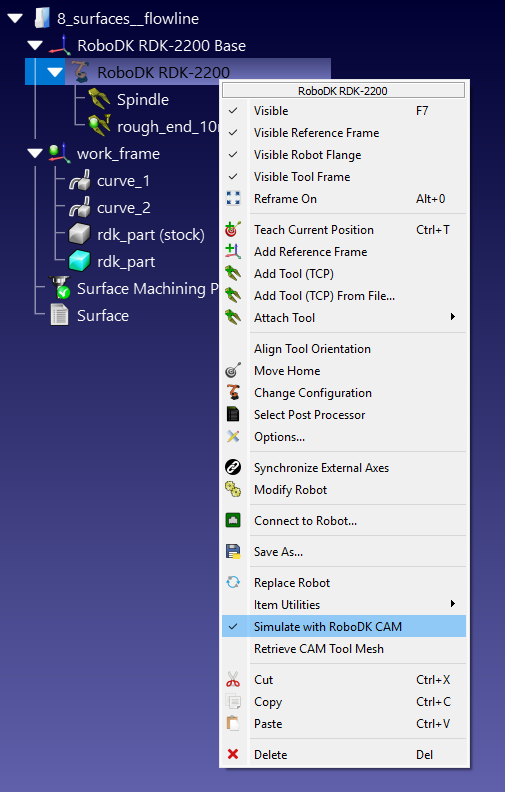
Una volta che il robot è collegato alla simulazione, qualsiasi movimento del robot nella finestra RoboDK verrà ripetuto dal simulatore come movimento dell'utensile. Indipendentemente dalla fonte di questo movimento: un programma RoboDK, uno script Python o un movimento manuale con il mouse.
Nota: il comando di collegamento del robot è disponibile anche dal menu CAM-Link Robot.