Libreria degli utensili da taglio
La libreria degli utensili da taglio è una raccolta di utensili da taglio per macchine o frese. Questi utensili o frese sono quelli che vengono collegati all'utensile principale del robot (ad esempio il mandrino).
Selezionare CAM - Libreria utensili di taglio o l'icona corrispondente sulla barra degli strumenti CAM per visualizzare la libreria delle frese.

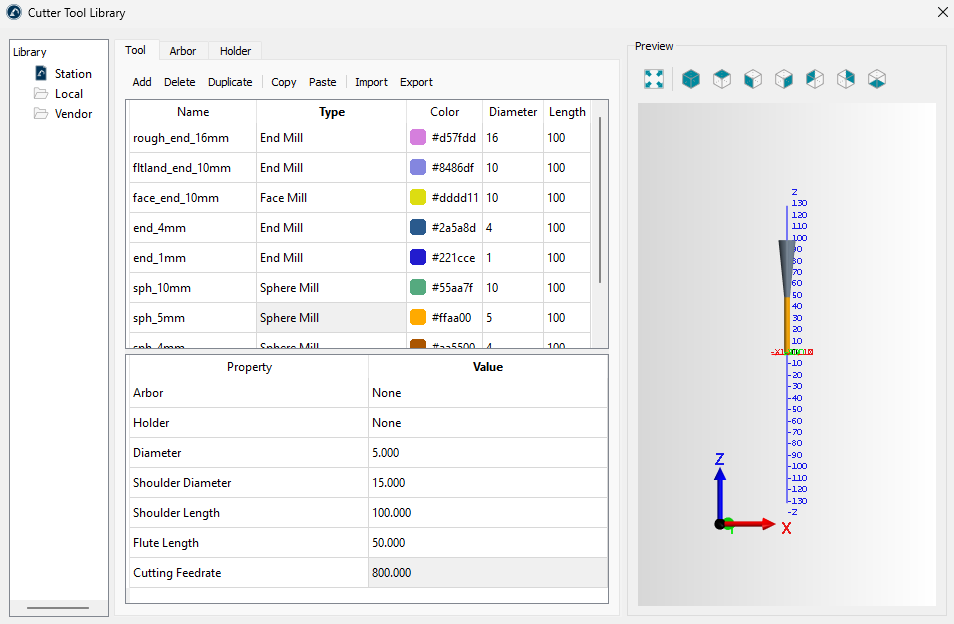
La finestra della libreria contiene tre schede per specificare utensili, alberi e supporti in forma tabellare.
Se la stazione RoboDK contiene già degli utensili robotizzati (frese), questi saranno visualizzati nella finestra Libreria utensili di taglio. Se nella stazione non sono presenti frese, è possibile crearle direttamente nella finestra Libreria utensili di taglio utilizzando il pulsante Aggiungi nella scheda Utensili.
Nella parte superiore della scheda Utensile è necessario impostare il tipo di utensile. Qui è anche possibile rinominare l'utensile o impostare il colore del tagliente. Per modificare i campi corrispondenti, fare doppio clic.
Nella parte inferiore della scheda Utensile è possibile modificare i parametri dell'utensile corrente. Sono disponibili diversi set di parametri per i diversi tipi di utensili. Ad esempio, una fresa ha solo tre parametri principali: diametro, lunghezza della spalla, lunghezza della scanalatura e velocità di taglio.
Gli alberi e i portautensili sono definiti nelle schede corrispondenti della finestra Libreria utensili di taglio.
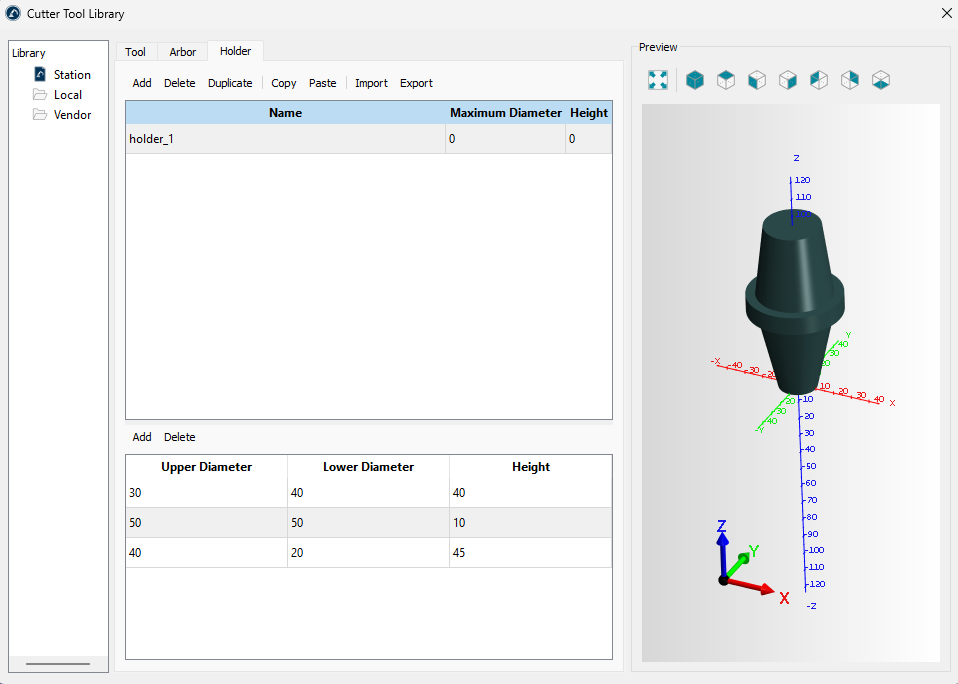
Un mandrino o un supporto è convenzionalmente rappresentato da un insieme di coni uniti tra loro. La parte inferiore della scheda Mandrino o Supporto consente di specificare i parametri geometrici dei coni che compongono rispettivamente un mandrino o un supporto. Diversi utensili possono utilizzare lo stesso supporto o mandrino contemporaneamente.
Un utensile robotico con capacità di taglio è anche una fresa in RoboDK. Quando si dispone di una fresa, è possibile regolare il TCP lungo l'asse Z del supporto: