Simulazione di asportazione di materiale
La simulazione di asportazione di materiale è una visualizzazione dinamica passo dopo passo del processo di asportazione di materiale. Fornisce una simulazione dettagliata di come un utensile effettua il taglio di un pezzo o di un grezzo, consentendo di osservare ogni fase del processo di fresatura.
È necessario seguire questi passaggi per simulare correttamente l'asportazione di materiale con RoboDK CAM:
1.È necessario definire la fresa.
2.Collegare il robot o il CNC se nella stazione è presente più di un braccio robotico.
3.Specificare l'oggetto grezzo.
4.Abilitare la simulazione di taglio. In caso contrario, la simulazione verrà eseguita senza asportazione di materiale.
Collegare il robot
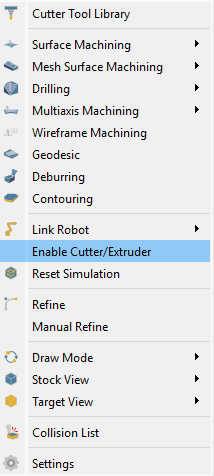
Utilizzare la freccia giù sul pulsante Collega robot per visualizzare un menu dei robot disponibili e collegare la simulazione a uno di essi. Se il pulsante è selezionato (il robot è collegato), premendolo si disconnetterà il robot dalla simulazione.
Il collegamento tra il robot e la simulazione può essere effettuato anche utilizzando il menu contestuale nell'albero della stazione.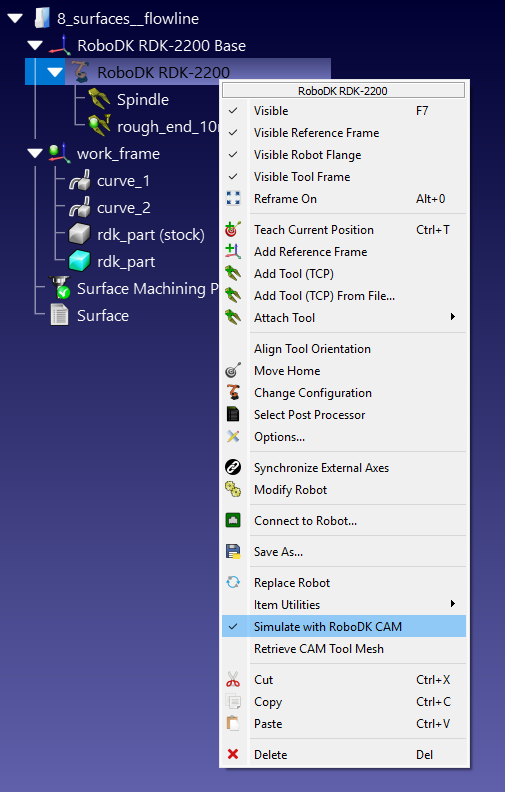
Una volta che il robot è collegato alla simulazione, qualsiasi movimento del robot nella finestra RoboDK verrà ripetuto dal simulatore come movimento dell'utensile. Indipendentemente dalla fonte di questo movimento: un programma RoboDK, uno script Python o un movimento manuale con il mouse.
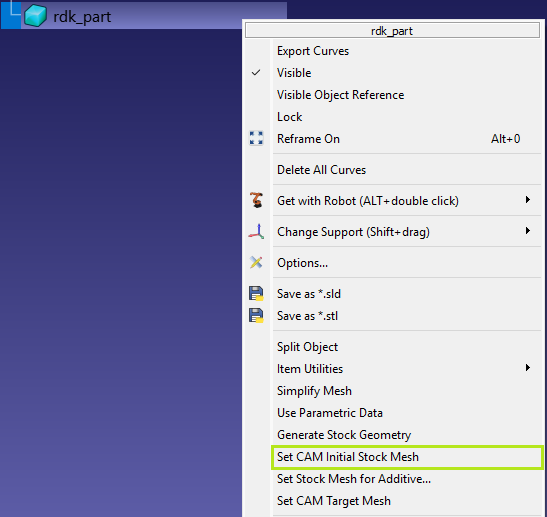
Definizione dell'oggetto grezzo
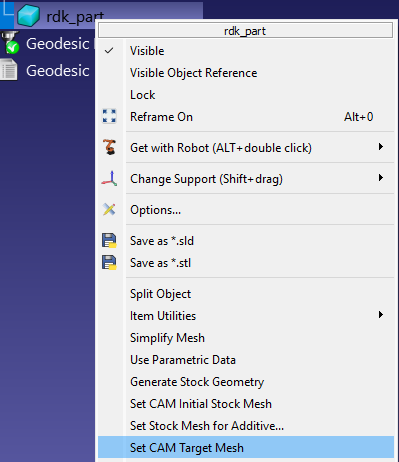
Fare clic con il pulsante destro del mouse sull'oggetto stock nell'albero della stazione RoboDK e selezionare Imposta mesh stock iniziale CAM.
Generazione dell'oggetto grezzo
Fare clic con il pulsante destro del mouse sull'oggetto stock nell'albero delle stazioni RoboDK e selezionare Genera geometria stock.
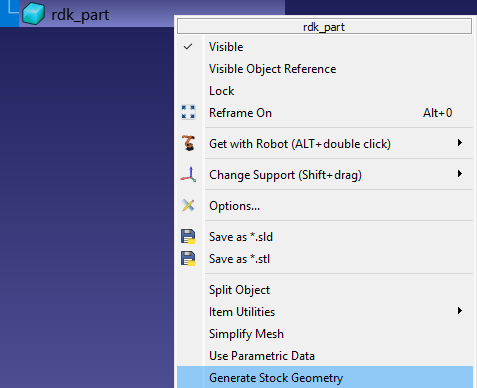
Questo comando avvierà l'utilità di creazione del grezzo, che utilizza la forma del modello originale per il processo di generazione.
Esistono tre metodi per generare i grossi:
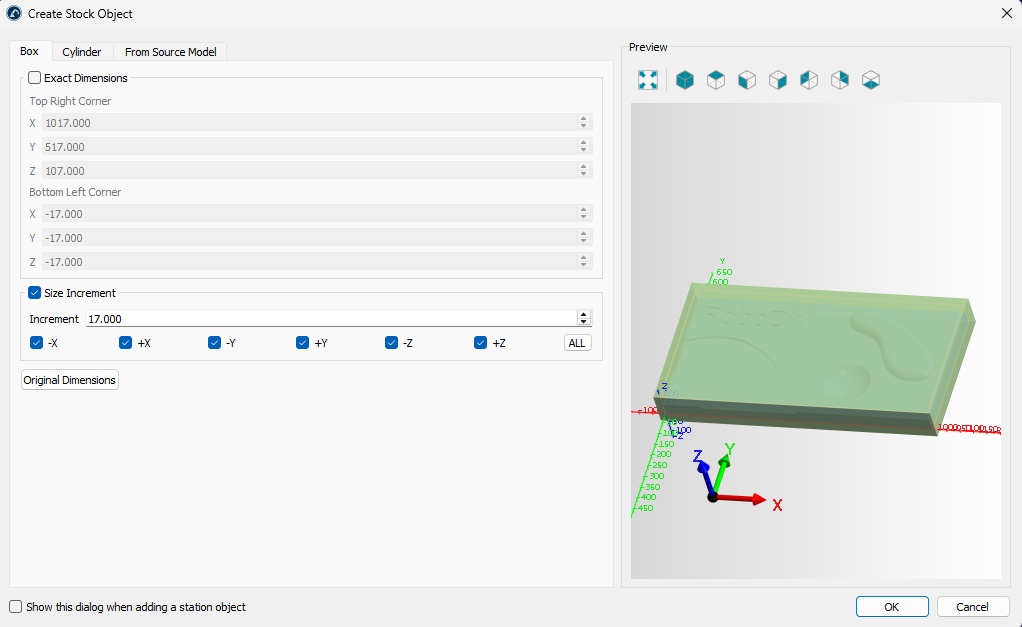
1.Riquadro di delimitazione – Scatola Riquadro
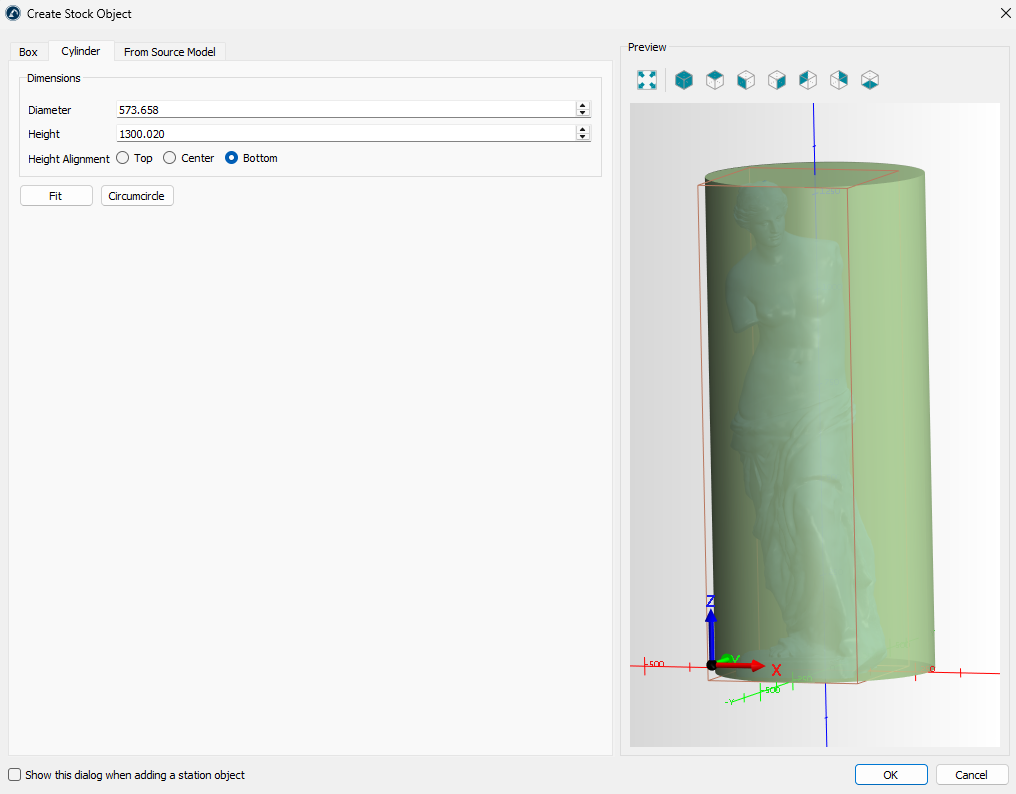
2.Cilindro di delimitazione – Scheda Cilindro
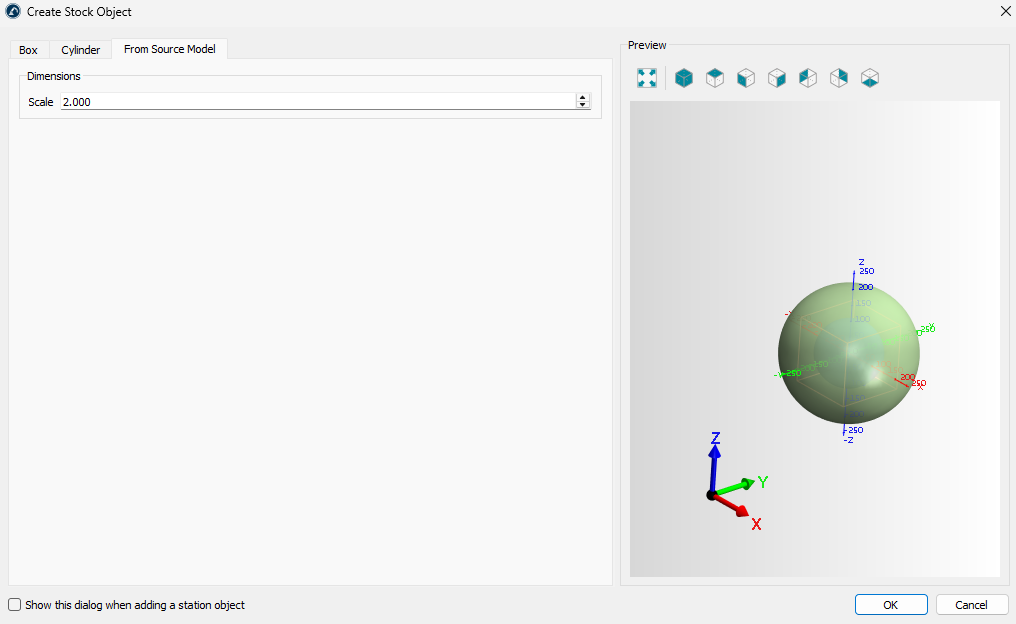
3.Ridimensionamento - Scheda Da modello sorgente
Nella scheda Scatola è possibile specificare le dimensioni esatte della scatola di delimitazione o generarla estraendo (utilizzando il pulsante Dimensioni originali) e ingrandendo dimensioni specifiche.
La scheda Cilindro consente di creare uno stock grezzo sotto forma di cilindro contenente il modello originale.
La scheda Da modello sorgente consente di creare un prodotto grezzo sotto forma di modello originale ridimensionato.
Visualizzazione stock
Una volta completata la definizione dello stock, il modello di simulazione dello stock verrà visualizzato sopra gli altri modelli nella scena RoboDK. È possibile controllare la visualizzazione della simulazione dello stock utilizzando il sottomenu Visualizzazione stock sulla barra degli strumenti:
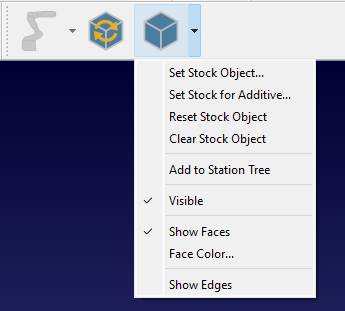
Imposta oggetto stock: definisce/ridefinisce un oggetto stock.
Imposta stock per oggetto additivo: definisce/ridefinisce un oggetto stock additivo.
Reimposta oggetto stock: ripristina lo stock al suo stato iniziale.
Cancella oggetto stock: elimina un oggetto stock.
Aggiungi all'albero delle stazioni: copia il grezzo nel suo stato attuale come modello nell'albero delle stazioni di RoboDK.
Visibile – interruttore di visibilità del materiale grezzo.
Mostra facce: visualizza le facce del grezzo.
Colore delle facce... – imposta il colore predefinito per le facce.
Mostra bordi – visualizza i bordi del materiale grezzo.
Attiva simulazione di asportazione di materiale
La simulazione di asportazione di materiale viene attivata automaticamente. Tuttavia, è possibile controllarla manualmente utilizzando il comando CAM-Abilita fresa/estrusore.
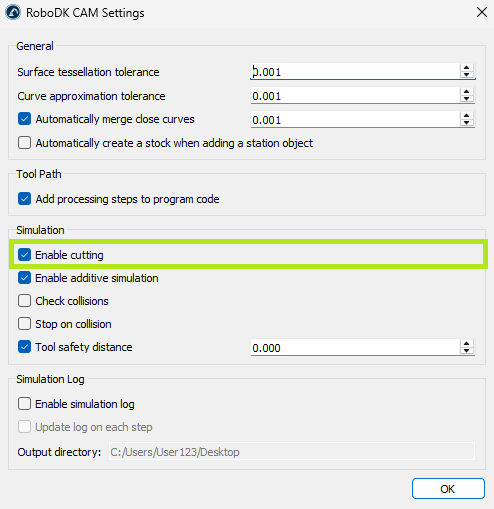
Inoltre, è necessario verificare che l'impostazione CAM-Settings-Simulation-Enable taglio sia attiva.
Reimposta simulazione
Il comando di ripristino della simulazione riporta il materiale grezzo allo stato iniziale.

Vista bersaglio
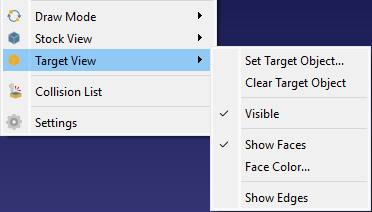
È possibile confrontare lo stato attuale del pezzo con il modello di bersaglio. A tal fine, è necessario innanzitutto impostare il modello di bersaglio utilizzando CAM-Vista di destinazione-Imposta oggetto di destinazione, quindi applicare CAM-Modalità di disegno-Mappa di deviazione.
Per impostare l'oggetto bersaglio, è anche possibile fare clic con il pulsante destro del mouse sul modello nell'albero della stazione e selezionare il comando Imposta mesh target CAM.
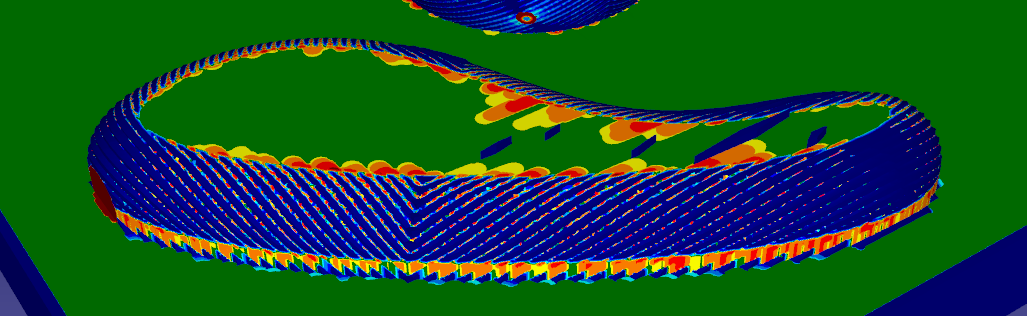
Mappa di deviazione
La mappa delle deviazioni mostra la differenza relativa utilizzando una scala di colori che va dal verde, che indica nessuna differenza, al rosso, che indica la differenza maggiore.
Selezionare CAM-Draw Mode-Deviation Map per visualizzare la mappa di deviazione.
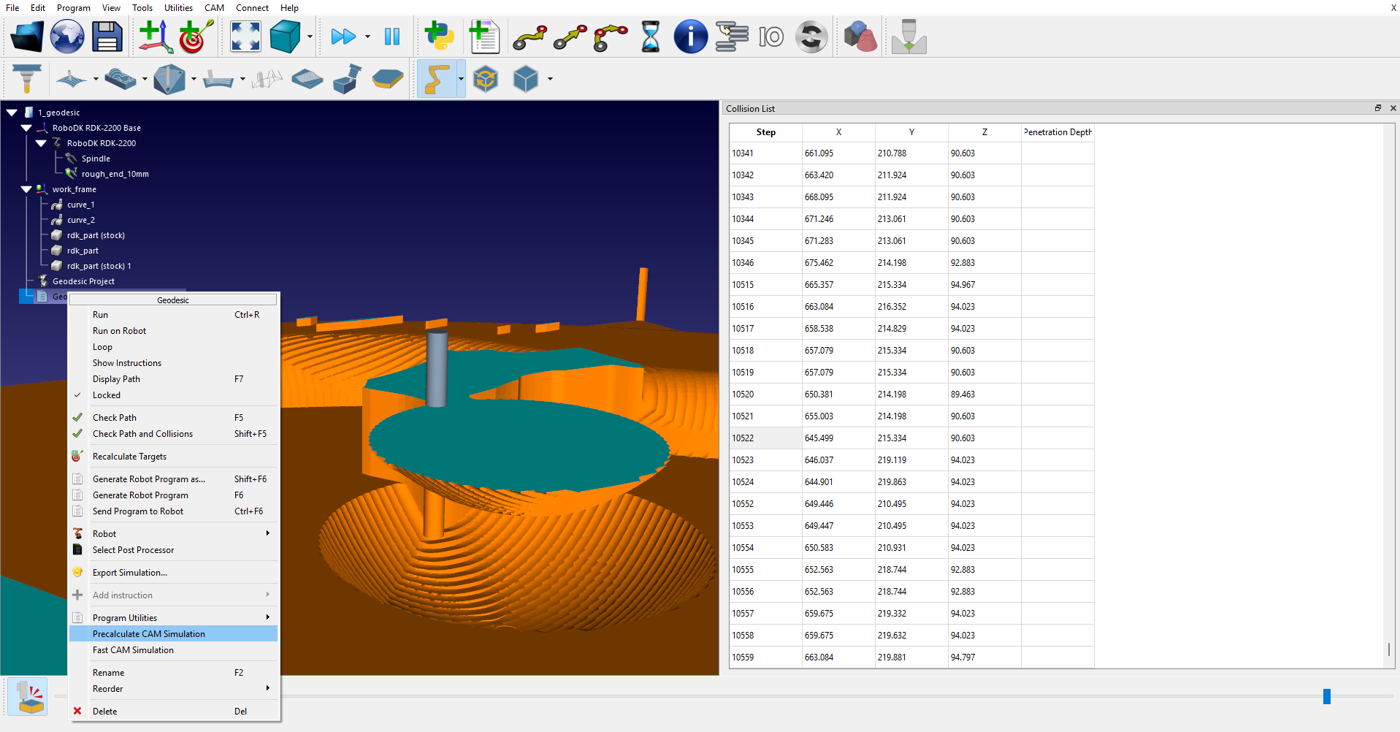
Elenco delle collisioni
L'elenco delle collisioni mostra la sequenza delle collisioni tra le parti non taglienti dell'utensile di taglio (ad esempio il supporto) e il pezzo durante la fresatura.
Selezionare CAM-Elenco collisioni per visualizzare l'elenco delle collisioni.
Raffina/Raffina manualmente
Con l'opzione Perfeziona abilitata, è possibile ottenere una visualizzazione della superficie di qualità superiore durante la simulazione (ciò potrebbe influire sulle prestazioni di rendering).
Utilizzando il comando Manual Refine, è possibile migliorare la visualizzazione delle superfici una volta dopo averlo premuto.
Selezionare CAM-Raffina / CAM-Raffina manuale per eseguire l'operazione di raffinamento.
Simulazione CAM veloce
È possibile eseguire una simulazione rapida dell'asportazione di materiale. A tal fine, fare clic con il pulsante destro del mouse sul programma di bersaglio e selezionare il comando Simulazione CAM veloce.