Aggiungi nuovi obiettivi alla mappa
Qualsiasi nuovo obiettivo può essere aggiunto alla roadmap PRM senza dover rigenerare l'intera mappa. Questo significa che la roadmap deve essere completamente rigenerata solo se vengono aggiunti nuovi oggetti all'area di lavoro o se gli oggetti esistenti vengono spostati.
Quando un nuovo target viene aggiunto alla roadmap, l'algoritmo PRM tenterà di collegarlo ad un certo numero di punti già esistenti all'interno della roadmap con una serie di nuovi bordi. È possibile impostare un numero di bordi di default diverso per i nuovi target rispetto al numero scelto per la costruzione iniziale della roadmap.
Il numero massimo di bordi per i nuovi obiettivi può essere impostato con il seguente processo
1.Aprire il pannello del Collision-free motion planner andando nel menu➔Utilities (Utilità) Collision-free motion planner➔Create collision-free motion planner, oppure cliccare sulla piccola freccia accanto a 
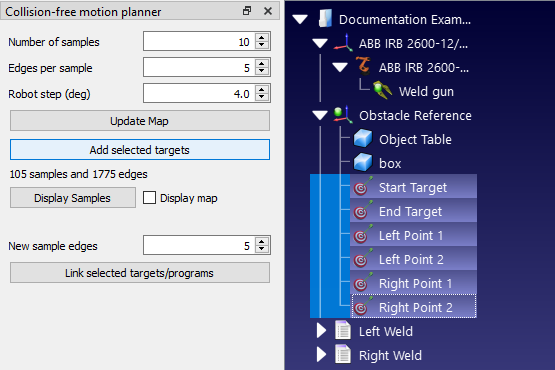
2.Inserire il numero di bordi nella casella etichettata Nuovi bordi del campione. Il valore predefinito è 5.
Ci sono due modi per aggiungere nuovi obiettivi alla tabella di marcia:
1.Selezionare gli obiettivi nell'albero della stazione. Più bersagli adiacenti possono essere selezionati contemporaneamente cliccando sul bersaglio più alto, tenendo premuto il tasto Shift, e poi cliccando sul bersaglio più basso. Più bersagli non adiacenti possono essere selezionati tenendo premuto il tasto Ctrl. Quindi fare clic su Add selected targets (Aggiungi obiettivi selezionati) nel pannello del Collision-free motion planner panel (Pianificatore di movimento senza collisioni).
2.È sufficiente utilizzare lo stesso metodo per collegare i target selezionati o i programmi selezionati descritti nelle sezioni precedenti (Link Targets e Link Programs). Qualsiasi target che non sia già presente nella roadmap verrà aggiunto automaticamente.