Dispositivo anticollisione per la lavorazione di robot
Seguire questi passi per attivare il controllo automatico delle collisioni e la prevenzione delle collisioni per i progetti di lavorazione con robot:
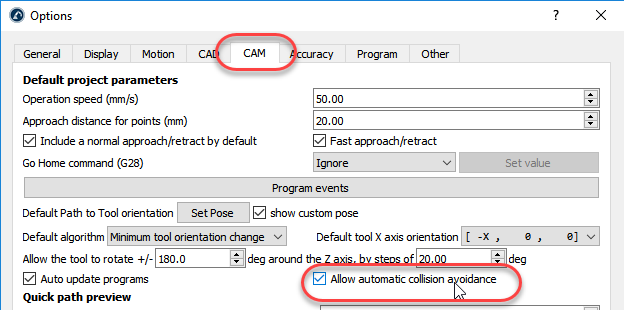
1.Seleziona Opzioni Strumenti➔CAM
2.Controllo Consentire la prevenzione automatica delle collisioni
3.Doppio clic sul progetto di lavorazione del vostro robot, stampa 3D, curva seguire o punto seguire progetto.
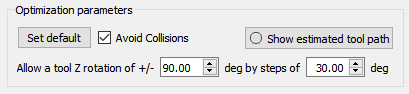
4.Controllo Evita collisioni: in questo modo si attiva la prevenzione automatica delle collisioni modificando l'orientamento dell'utensile intorno all'asse Z come descritto nei parametri di ottimizzazione.
Importante: Questa opzione cercherà di evitare automaticamente le collisioni ruotando attorno all'asse Z dell'utensile. Assicurarsi che la fresa non sia controllata per evitare collisioni con il pezzo. Se si desidera verificare la presenza di collisioni tra il portautensile e il pezzo, potrebbe essere necessario dividere il mandrino in 2 utensili (uno utilizzato per il rilevamento delle collisioni e un altro con informazioni di visualizzazione aggiuntive come la fresa).
Suggerimento: Il rilevamento delle collisioni per un percorso di lavorazione del robot può richiedere molto tempo per il calcolo. Assicuratevi di restringere correttamente la mappa delle collisioni per accelerare il processo di rilevamento ed evitare le collisioni.