Generare una tabella di marcia
La "fase di costruzione" del motion planner si realizza con il seguente processo, che genera una tabella di marcia dello spazio di lavoro del robot:
1.Aprire il pannello del Collision-free motion planner andando nel menu➔Utilities (Utilità) Collision-free motion planner➔Create collision-free motion planner, oppure cliccare sulla piccola freccia accanto a 
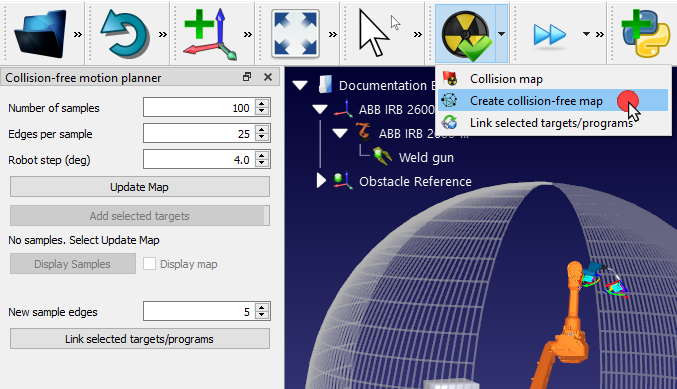
2.Inserire nuovi parametri o mantenere le impostazioni predefinite.
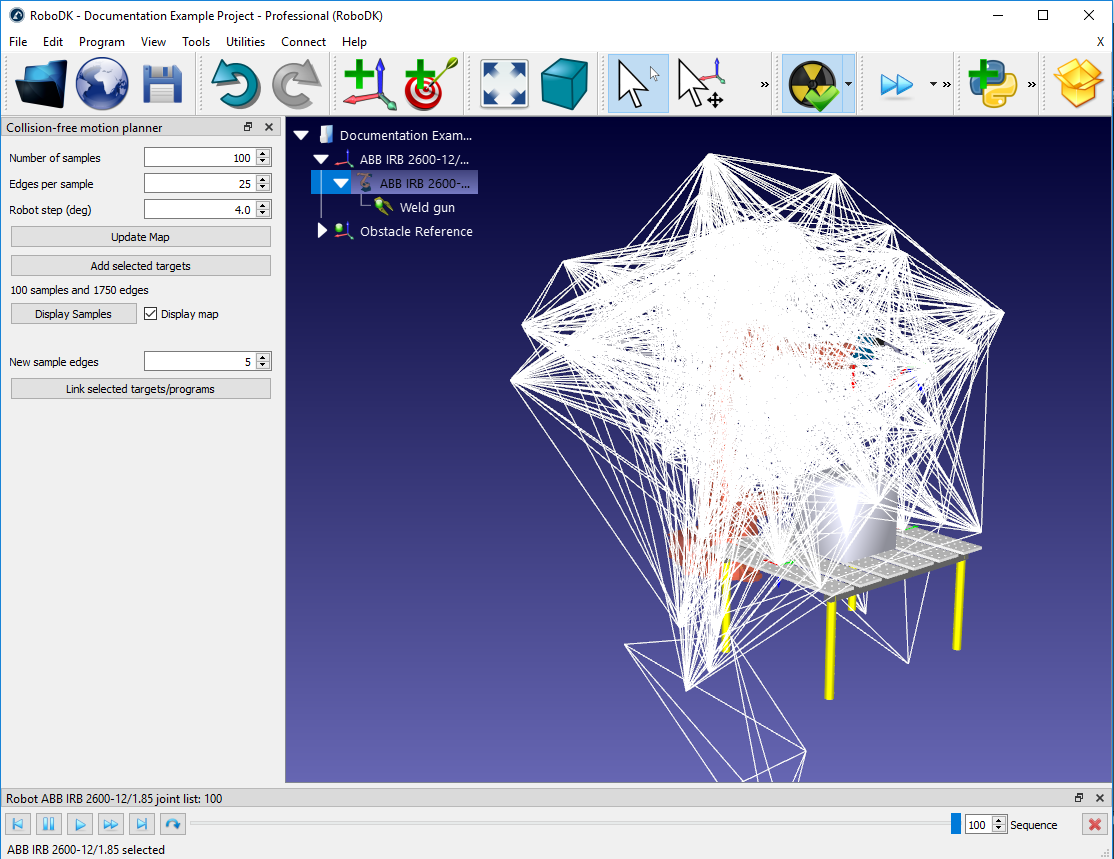
3.Cliccate su Aggiorna Mappa per generare la roadmap.
L'algoritmo PRM genererà quindi una tabella di marcia utilizzando i parametri scelti. Una volta terminato, la roadmap generata può essere visualizzata spuntando la casella Display Map. Cliccando su Display Samples il robot si muoverà attraverso tutti i campioni all'interno dell'area di lavoro.