Limiti del giunto di vincolo
È insolito che un compito utilizzi tutto lo spazio di lavoro del robot. Quando si crea una mappa PRM, spesso è una buona idea limitare i limiti comuni del robot. Questo velocizzerà il processo di generazione della mappa e garantirà che i punti all'interno di quella mappa si trovino nel posto migliore.
Per i robot a 6 assi, i due giunti che sono più spesso limitati lo sono:
1.Giunto 1 (il giunto di base) - La limitazione di questo giunto impedisce al robot di spostarsi troppo lontano da entrambi i lati dell'area di lavoro.
2.Giunto 3 (l'articolazione del gomito) - La limitazione di questo giunto impedisce al robot di cambiare tra la configurazione del gomito in su e quella del gomito in giù.
Modificare i limiti dei giunti con il seguente processo:
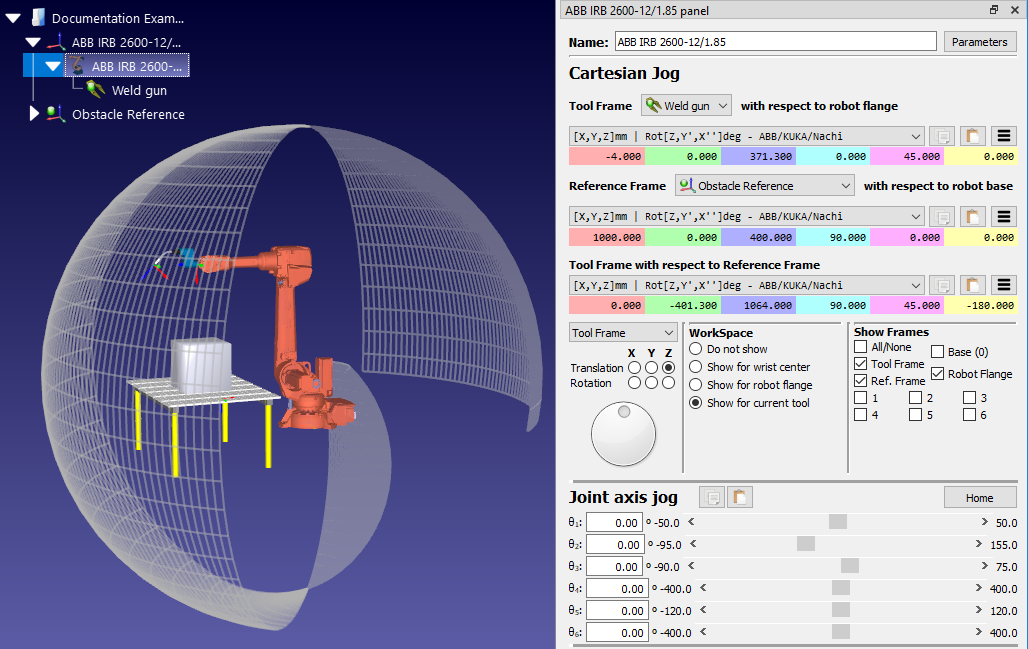
1.Cliccare con il tasto destro del mouse sull'icona del modello di robot all'interno dell'albero della stazione (ad es. ABB IRB 2600-12/1.85) e selezionare Opzioni... per aprire il pannello del robot. In alternativa, basta fare doppio clic sul nome del robot nell'albero della stazione.
2.Nella sezione Joint axis jog, spostare i cursori dei giunti del robot che si desidera limitare (ad es. θ1 e θ3) per trovare dove si desidera che si trovino i limiti inferiori dei giunti.
3.Fare doppio clic su uno dei limiti inferiori del giunto all'interno del jog dell'asse del giunto. Ad esempio, se il limite del giunto di θ1 è attualmente -180, fare doppio clic sul numero -180. In questo modo si aprirà il pannello Imposta limiti inferiori del giunto.
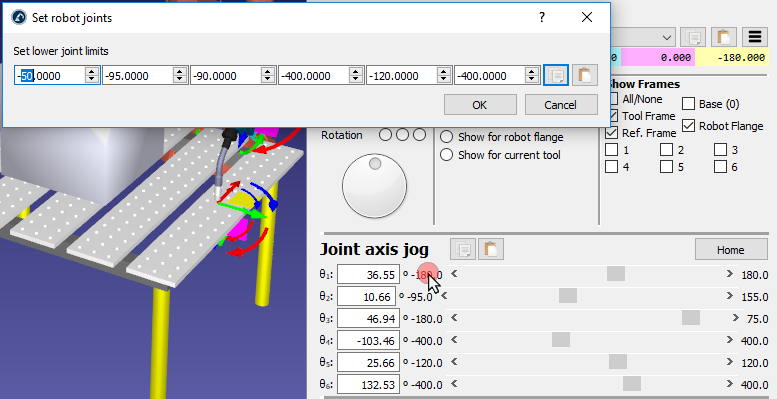
4.Impostare i limiti inferiori dei giunti a θ1 = -50 e θ3 = -90.
5.Modificare i limiti dei giunti e cliccare su OK.
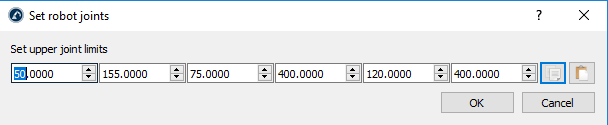
6.Utilizzando lo stesso processo con i limiti superiori del giunto, impostare θ1 = 50.
Questo cambiamento può essere visto osservando lo spazio di lavoro raggiungibile del robot. Mostrare lo spazio di lavoro selezionando l'opzione Mostra per l'utensile corrente nella sezione WorkSpace del pannello del robot. Mostrerà solo la parte dello spazio di lavoro ora raggiungibile con i nuovi limiti di giunzione.