Link Target
Alla "fase di interrogazione" del motion planner si accede quando due obiettivi o programmi sono collegati tra loro.
Per collegare due obiettivi, selezionarli prima nell'albero della stazione. Ci sono due modi per selezionare e collegare gli obiettivi:
1.Con il tasto Ctrl:
a.Cliccare con il tasto sinistro del mouse sul bersaglio che deve avviare il movimento (nell'esempio, il bersaglio denominato "Start Target").
b.Tenere premuto il tasto CTRL.
c.Cliccare con il tasto sinistro del mouse sul target di destinazione (ad es. "End Target")
d.Cliccare con il tasto destro del mouse su uno dei due obiettivi e selezionare Collega gli obiettivi selezionati. In alternativa, se il pannello del Collision-free motion planner è aperto, fare clic sul pulsante Link targets/programmi selezionati.
2.Con il tasto Shift:
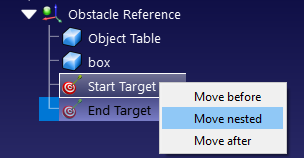
a.Disporre i due bersagli uno sopra l'altro nell'albero della stazione, con il bersaglio iniziale sopra il bersaglio finale. Un bersaglio può essere spostato intorno all'albero trascinandolo con il tasto destro del mouse. Lasciando cadere il bersaglio si aprirà un menu per scegliere dove il bersaglio deve essere posizionato.
b.Cliccare con il tasto sinistro del mouse su uno dei due obiettivi.
c.Tenere premuto il tasto Shift.
d.Cliccare con il tasto sinistro del mouse sull'altro obiettivo.
e.Cliccare con il tasto destro del mouse su uno dei due obiettivi e selezionare Collega gli obiettivi selezionati. In alternativa, se il pannello del Collision-free motion planner è aperto, fare clic sul pulsante Link targets/programmi selezionati.
Entrambi i metodi genereranno un nuovo programma che collega i due obiettivi utilizzando la roadmap salvata. Per creare un movimento nella direzione opposta, selezionare i target nell'ordine opposto - cioè selezionando End Target prima di Start Target usando il metodo Ctrl, o riorganizzando i target nell'albero della stazione per il metodo SHIFT.