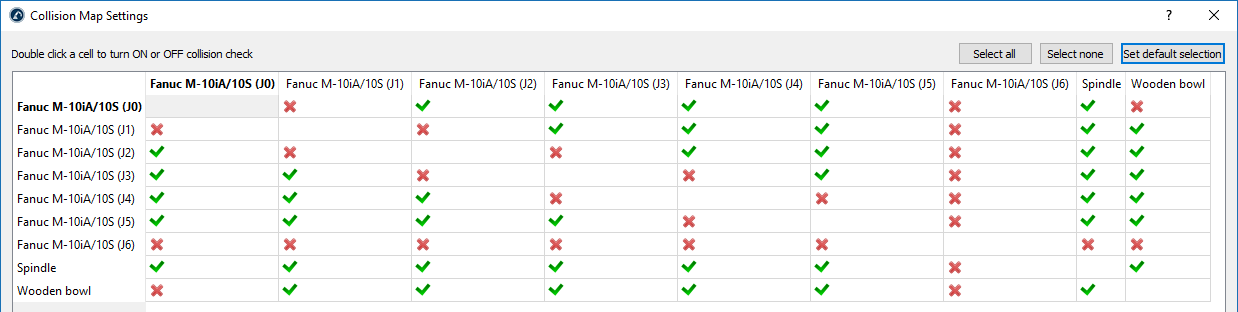
E' possibile specificare se l'interazione tra una qualsiasi coppia di oggetti è controllata per le collisioni selezionando Strumenti➔ Mappa delle collisioni. Si aprirà una nuova finestra che mostra tutte le relazioni e lo stato di controllo delle collisioni. Fare doppio clic su una cella per attivare o disattivare il controllo di collisione per quella relazione. Selezionare Imposta selezione predefinita per impostare automaticamente una selezione conservativa.
Per impostazione predefinita, RoboDK controlla le collisioni tra tutti gli oggetti in movimento nella stazione, compresi tutti i collegamenti dei robot, gli oggetti e gli utensili. Come eccezione, i collegamenti consecutivi dei robot non vengono controllati per le collisioni in quanto possono essere sempre in contatto.
Suggerimento: Fare doppio clic sulla custodia nella diagonale per controllare/sbloccare le collisioni di un determinato oggetto contro tutti gli altri oggetti.
Suggerimento: se la simulazione rallenta a causa del controllo delle collisioni, potrebbe essere meglio ridurre il numero di controlli per utilizzare meno energia del computer per il controllo delle collisioni.