Suggerimenti e buone pratiche
Il motion planner è semplice da usare, ma ci sono alcune buone pratiche che miglioreranno il flusso di lavoro della programmazione.
Iniziare con piccoli parametri
La fase di costruzione può richiedere molto tempo. Questo può diventare ingombrante durante le prime fasi di programmazione, quando il layout della cella robotizzata cambia costantemente. Ogni volta che un oggetto viene aggiunto all'area di lavoro o spostato, l'intera tabella di marcia deve essere rigenerata.
Per ridurre il tempo trascorso in attesa che la roadmap venga generata, è una buona idea utilizzare parametri più piccoli all'inizio.
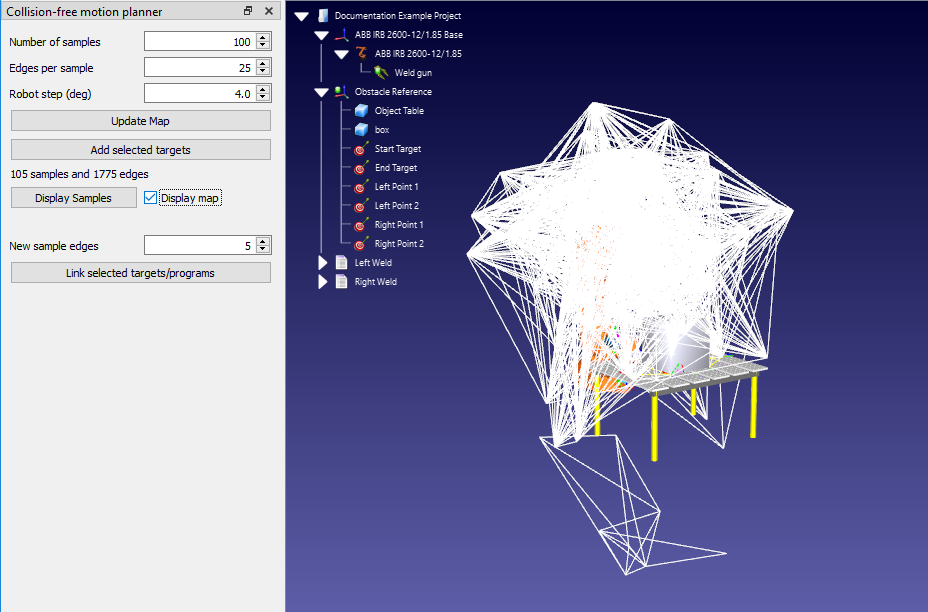
Ad esempio, i seguenti parametri possono generare una mappa entro 10-15 secondi:
1.Numero di campioni: 10
2.Bordi per campione: 5
3.Passo del robot (deg): 4.0
Questo non produrrà i più efficienti movimenti senza collisioni, ma permetterà di modificare il design della cella molto più rapidamente.
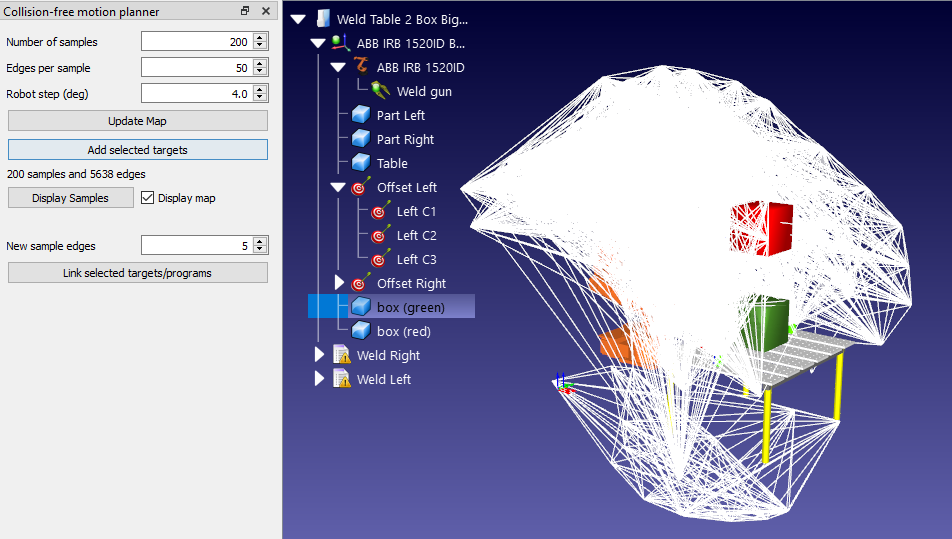
Quando le posizioni di tutti gli oggetti nella cella sono state decise, allora si può generare una mappa più grande (p.es. con i parametri di default di 100, 25, 4.0).
Infine, prima di generare il programma del robot, può essere una buona idea generare una tabella di marcia ancora più ampia (ad esempio con parametri di 500, 50, 2.0). Questo richiederà molto tempo per generare, ma produrrà i movimenti più efficienti.
Utilizzare i limiti dei giunti
L'impostazione dei limiti dei giunti del robot (come descritto nella sezione precedente Limiti dei giunti di vincolo) ha un duplice vantaggio. In primo luogo, in alcuni casi può rendere più rapida la fase di costruzione. In secondo luogo, garantisce che la tabella di marcia contenga effettivamente le posizioni che saranno utili per il programma del robot. È facile dimenticare questa fase vitale.
Definire correttamente la mappa delle collisioni
Il rilevamento delle collisioni viene attivato quando 2 oggetti entrano in collisione. È possibile specificare la correlazione tra ogni oggetto in movimento nelle impostazioni della Collision Map. Riducendo il numero di interazioni (segni di spunta verdi) si accelera il controllo delle collisioni.
Controllo delle collisioni più rapido
Il tempo necessario per calcolare i percorsi senza collisioni dipende da molti fattori, come descritto nella sezione relativa al rilevamento delle collisioni. Tra le altre cose, è possibile aumentare il passo del robot per il controllo delle collisioni, limitare i limiti dei giunti o semplificare la geometria 3D per accelerare il controllo delle collisioni.
Offset dei modelli 3D
Il termine "collisione-elusione" suggerisce che il motion planner eviterà sempre le collisioni in tutte le situazioni. Questo è certamente vero nell'ambiente di simulazione. Tuttavia, nel mondo reale, il robot può ancora collidere con gli oggetti se si avvicina troppo ad essi. Questo avviene di solito a causa di leggere differenze tra il robot simulato e il robot fisico.
Un'istanza comune di tali collisioni è quando il robot "aggancia" il bordo di un oggetto quando si allontana da un compito. Questo può essere di solito evitato includendo un "offset" nel programma. Vedere questo articolo del blog per maggiori informazioni sull'uso efficace degli offset.
Operare nella zona più abile del robot
Non tutte le aree dello spazio di lavoro del robot sono uguali. Il robot avrà più "raggiungibilità" in alcune aree del suo spazio di lavoro rispetto ad altre. Nelle aree ad alta raggiungibilità, il robot sarà in grado di accedere ai punti di accesso da molti orientamenti. Nelle aree con bassa raggiungibilità, il robot sarà in grado di accedere ai punti di accesso solo da uno o due orientamenti.
A volte, il motion planner non riesce a trovare un percorso tra due obiettivi nell'area di lavoro. Spesso, questo problema può essere risolto semplicemente aumentando il numero di campioni nella tabella di marcia, ma non sempre.
Se il motion planner non riesce a collegare continuamente gli obiettivi, assicurarsi che l'attività si trovi all'interno dell'area di lavoro del robot con la massima raggiungibilità. Visualizzare l'area di lavoro del robot aprendo il pannello del robot (cliccare con il tasto destro del mouse sul robot nell'albero della stazione e scegliere Opzioni) e selezionando Mostra per l'utensile corrente nella sezione WorkSpace.