Calibrazione occhio-mano
La calibrazione dell'occhio è il processo di calibrazione della posizione della telecamera rispetto alla flangia o all'utensile del robot.
RoboDK le permette di simulare il processo di calibrazione occhio-mano. Può utilizzare la stessa procedura per calibrare le telecamere reali rispetto alla flangia o all'utensile del robot.
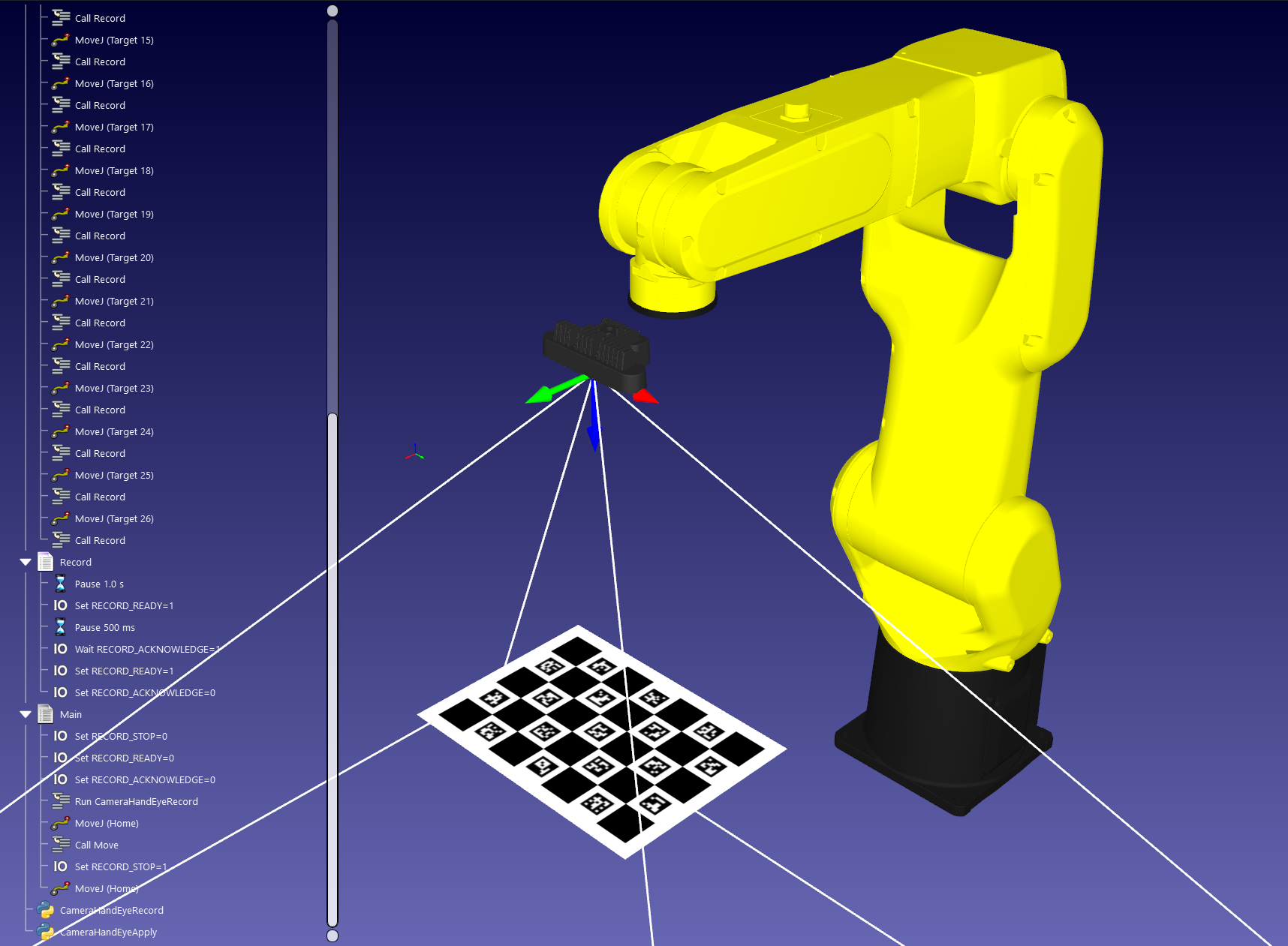
Può trovare un esempio perfettamente funzionante nella sezione esempi dell'API RoboDK per Python: https://robodk.com/doc/en/PythonAPI/examples.html#camera-hand-eye-calibration.