Lavorazione di robot in RoboDK
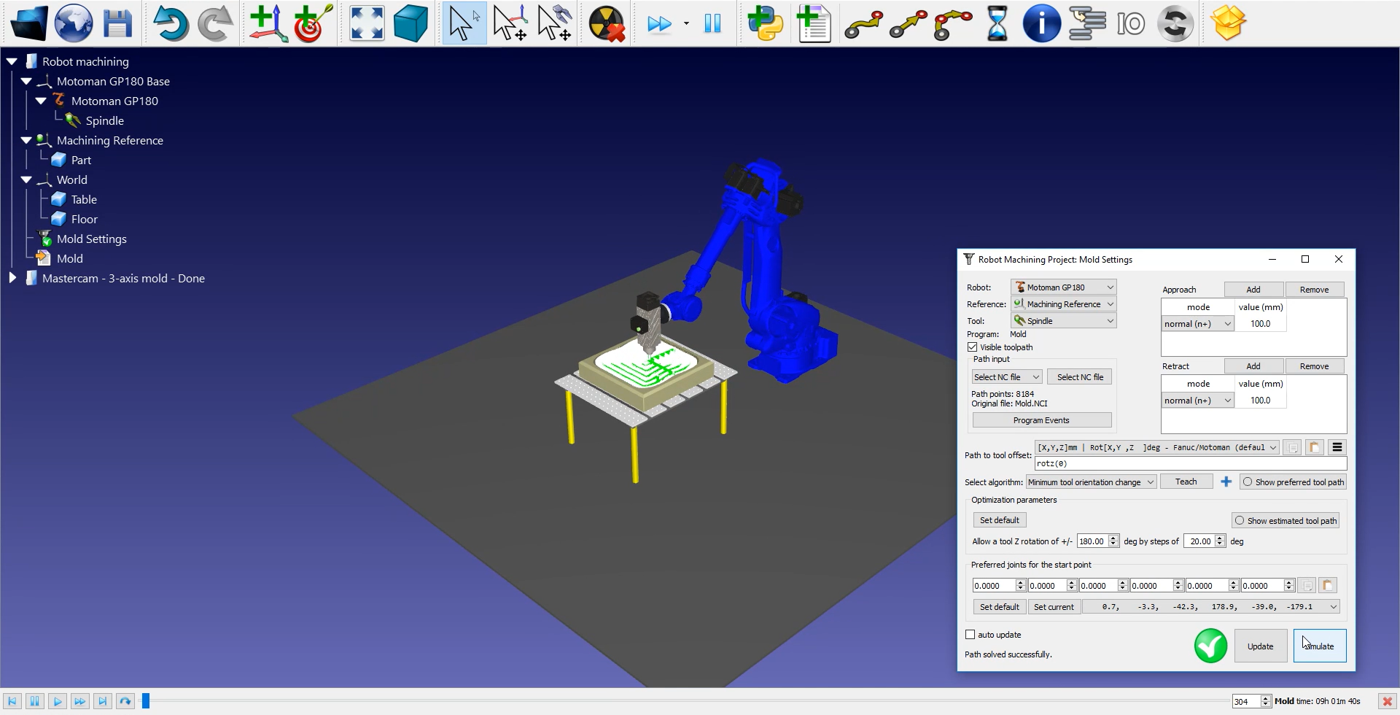
Una volta importato il percorso di lavorazione del robot in RoboDK, dovrebbe vedere il percorso di lavorazione del robot collegato al riferimento stampo della sua stazione RoboDK. In
Può anche regolare il valore dei movimenti di avvicinamento e ritrazione prima e dopo il percorso di taglio. Un valore di 100 mm dovrebbe andare bene in questo esempio. Se c'è il rischio di collisioni, può aumentarli quanto desidera all'interno del campo di lavoro del robot.
Il passo successivo è verificare se l'ordine di esecuzione delle sezioni del percorso è corretto, selezionando

Segua questi passaggi per regolare l'orientamento dell'utensile:
1.Clicchi due volte su
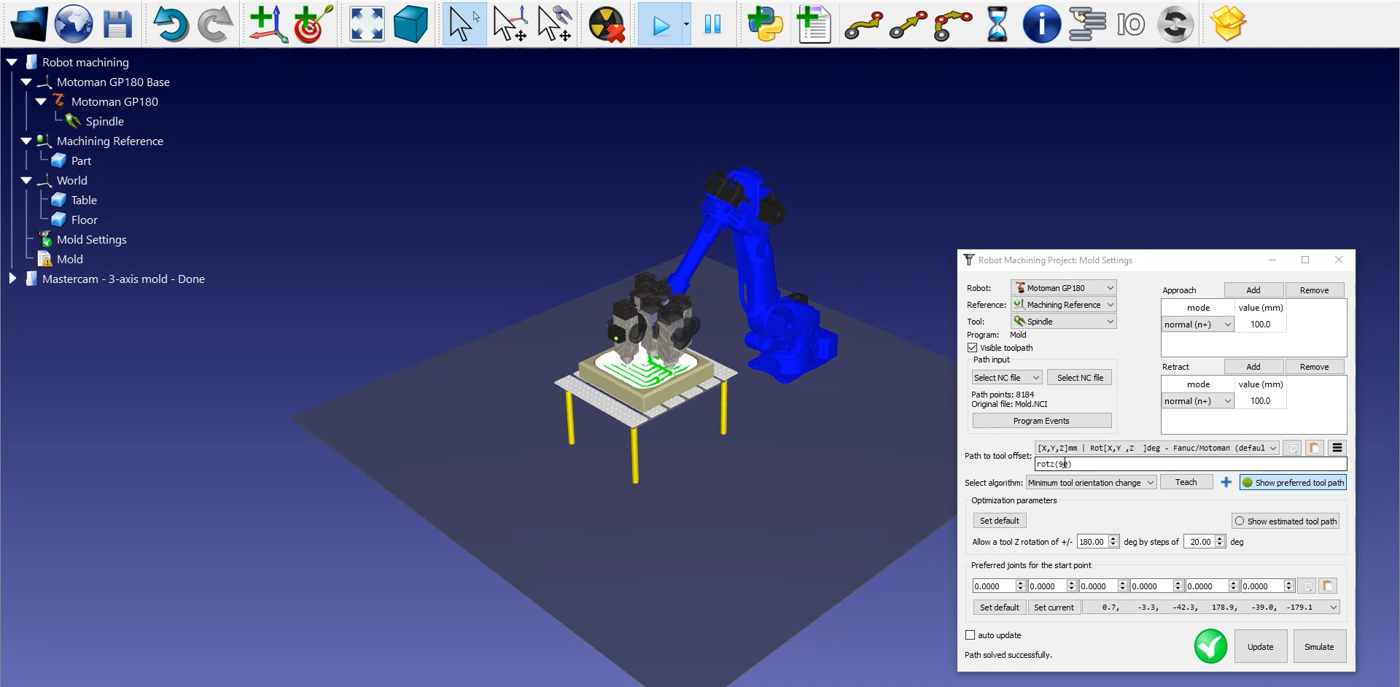
2.Selezioni Mostra percorso utensile preferito. Appariranno alcuni strumenti fantasma, come mostrato nell'immagine sottostante. Questi rappresentano la posizione del suo strumento lungo il percorso.
3.Modifichi il valore rotz (0) facendo scorrere la ruota fino a 90 gradi. Vedrà il valore rotz cambiare e la posizione dei pedaggi fantasma cambiare con esso.
4.Selezioni Aggiornamento➔ Simulazione.
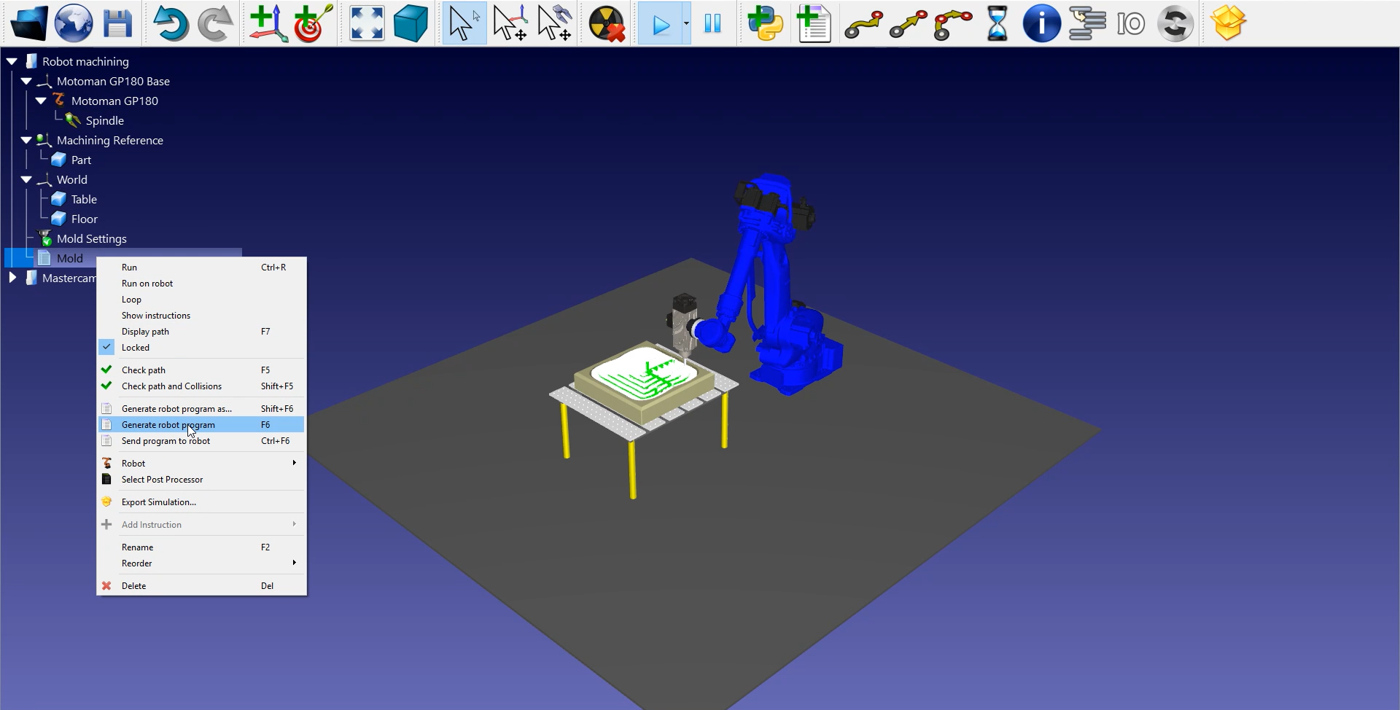
Per generare il programma del robot, si assicuri di utilizzare il post processor giusto. Clicchi due volte sul robot
Infine, faccia clic con il pulsante destro del mouse su
Il file Motoman JBI è ora pronto per essere trasferito al controllore del robot.