Mold Machining
Introduzione
Questo esempio la aiuterà a creare un semplice progetto di lavorazione a 3 assi in RoboDK, utilizzando il plugin Mastercam. In questo esempio viene simulato un robot Motoman con un utensile da taglio e programmato per lavorare un semplice stampo utilizzando il robot come macchina a 3 assi. Imparerà a trasformare un programma CNC in una simulazione di robot e in un programma di robot.
Video: Programmazione di robot con Mastercam per un'applicazione di lavorazione di stampi a 3 assi
Con il plug-in RoboDK per Mastercam può impostare rapidamente progetti di fresatura robotizzata direttamente da Mastercam a RoboDK. Questo plug-in le permette di programmare oltre 50 diversi produttori di robot e 500 robot direttamente da Mastercam.
Il plug-in RoboDK per Mastercam supporta i file NCI (file Mastercam nativi pre-elaborati) e i file APT CLS e G-code standard. Il plug-in è gratuito se ha acquistato una licenza RoboDK.
Lavorazione di robot per stampi a 3 assi
Per avviare il progetto, dovrà prima selezionare l'esempio di lavorazione di stampi a 3 assi di RoboDK nella libreria predefinita.
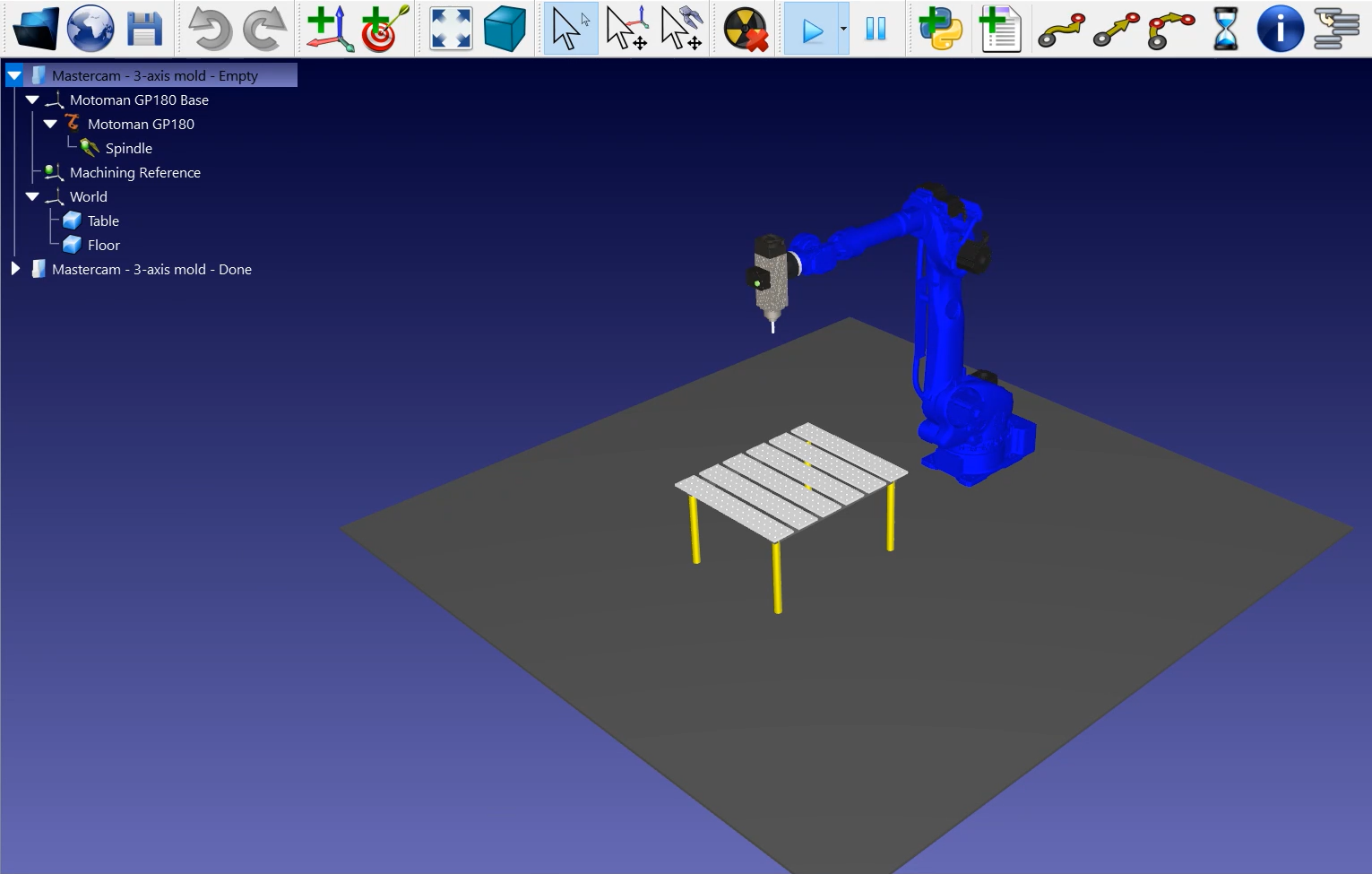
Impostazioni di RoboDK
Questo esempio utilizza il robot Motoman GP180, un utensile da taglio montato su un mandrino e un tavolo per tenere il pezzo in posizione.
Carica la stazione:
1.Selezionare File ➔
2.Individui l'esempio di lavorazione di stampi a 3 assi nella sezione esempi di RoboDK:
C:/RoboDK/Examples/ Plugin-Mastercam-3-Axis-Mold-Machining.rdk.
Ora che ha caricato la stazione, può aprire Mastercam e caricare il progetto da C:/RoboDK/Other/Plugin-Mastercam/Examples/Mold.mcam.
Percorso utensile di lavorazione in Mastercam
Apra il suo oggetto 3D in Mastercam e lanci la simulazione di taglio. In questo esempio, l'oggetto 3D è un pezzo di metallo stampato con un percorso di taglio già creato con gli strumenti di Mastercam
Per semplificare questo esempio, il numero di passaggi necessari per lavorare quel pezzo è stato notevolmente ridotto. In realtà, ci sarebbero molte più linee o percorsi di taglio nello stampo che non permetterebbero di vedere realmente l'utensile in azione.
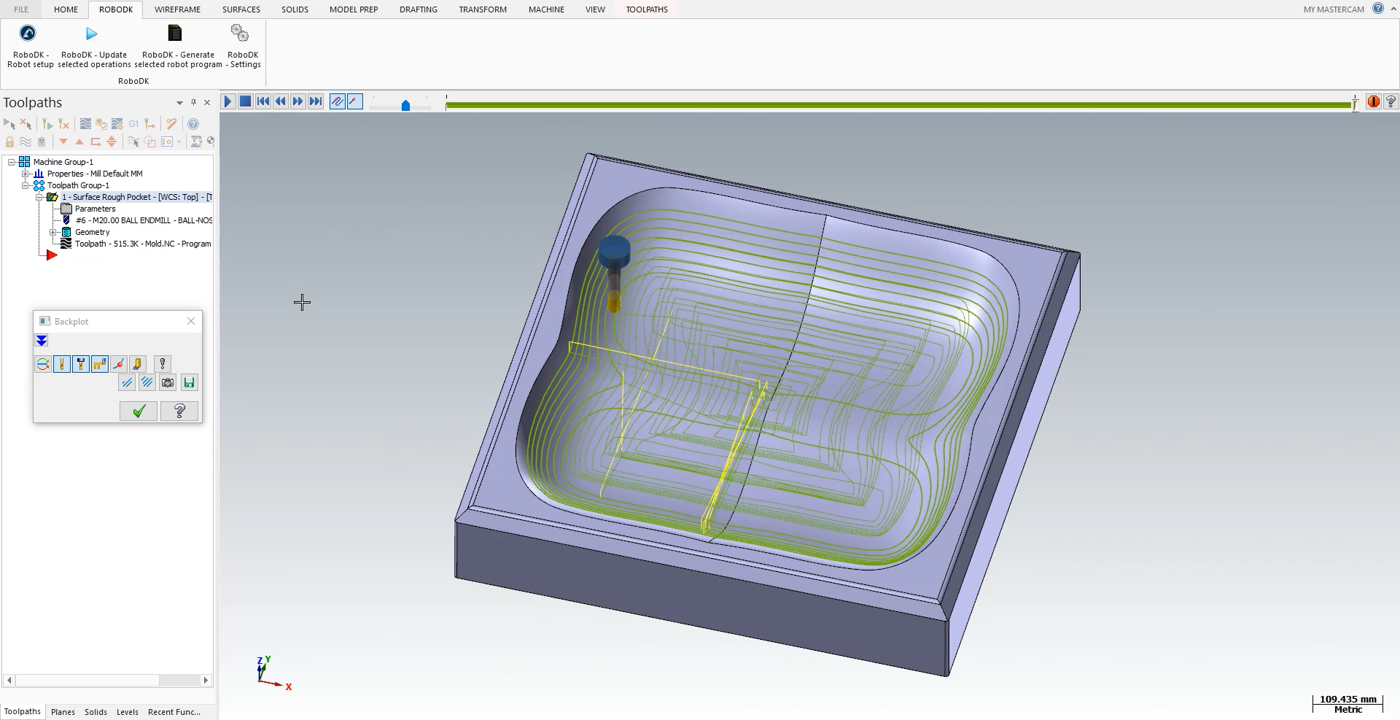
La simulazione di taglio di Mastercam mostra tutti i movimenti che l'utensile deve compiere durante il programma.
Segua i passi successivi per caricare la sua parte in RoboDK:
1.Selezioni la scheda RoboDK e selezioni RoboDK - Configurazione del robot.
2.Selezionare Carica parte.
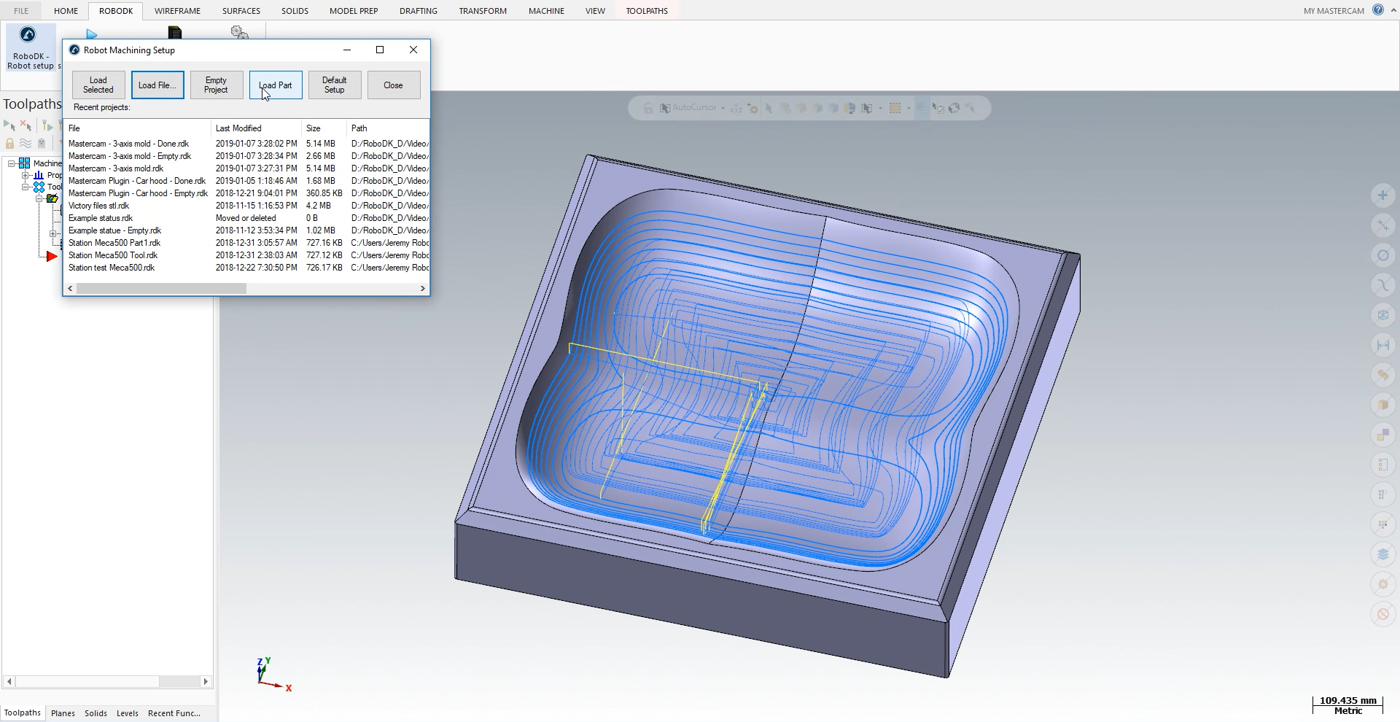
Dovrebbe vedere la parte caricata sul piano di riferimento attivo (Machining Reference) sul tavolo della stazione RoboDK.
Il passo successivo è importare il percorso di taglio da Mastercam a RoboDK.
1.Selezioni la scheda RoboDK in Mastercam.
2.Seleziona RoboDK - Aggiorna le operazioni selezionate.
3.Vada a RoboDK.
Lavorazione di robot in RoboDK
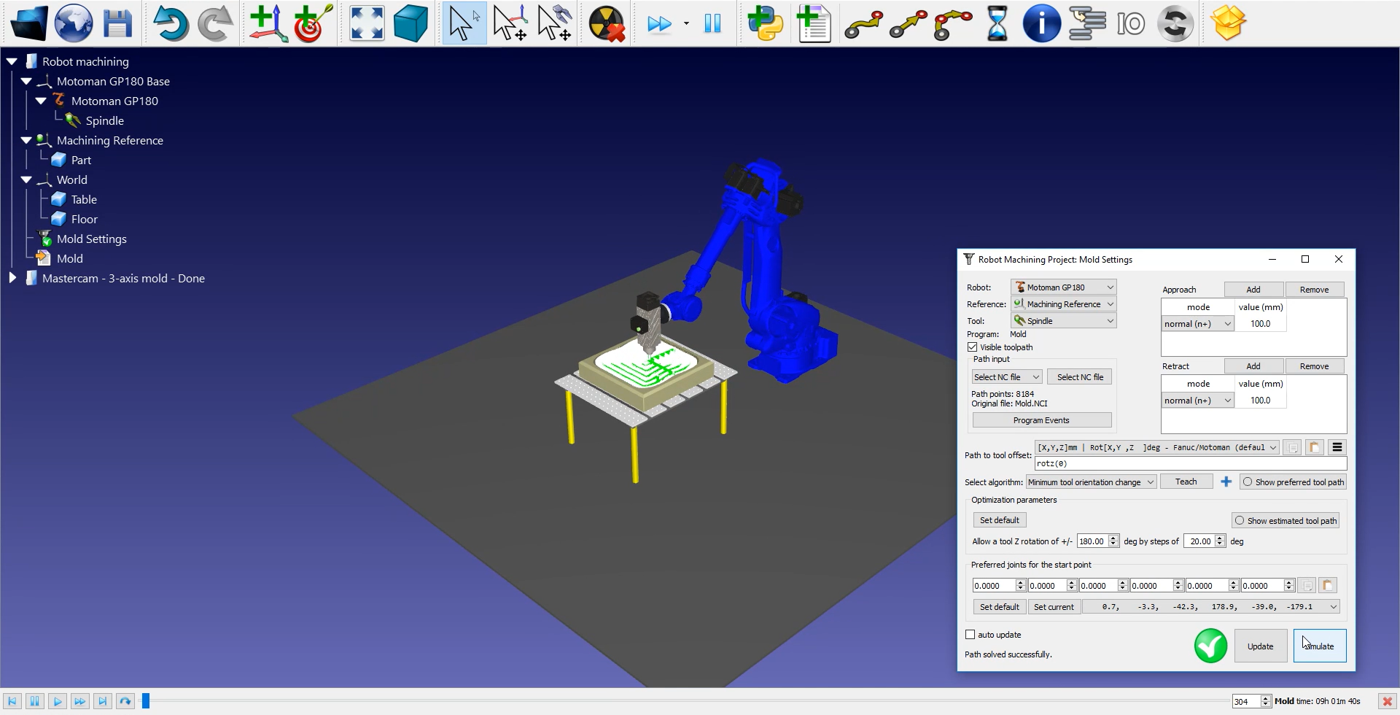
Una volta importato il percorso di lavorazione del robot in RoboDK, dovrebbe vedere il percorso di lavorazione del robot collegato al riferimento stampo della sua stazione RoboDK. In
Può anche regolare il valore dei movimenti di avvicinamento e ritrazione prima e dopo il percorso di taglio. Un valore di 100 mm dovrebbe andare bene in questo esempio. Se c'è il rischio di collisioni, può aumentarli quanto desidera all'interno del campo di lavoro del robot.
Il passo successivo è verificare se l'ordine di esecuzione delle sezioni del percorso è corretto, selezionando

Segua questi passaggi per regolare l'orientamento dell'utensile:
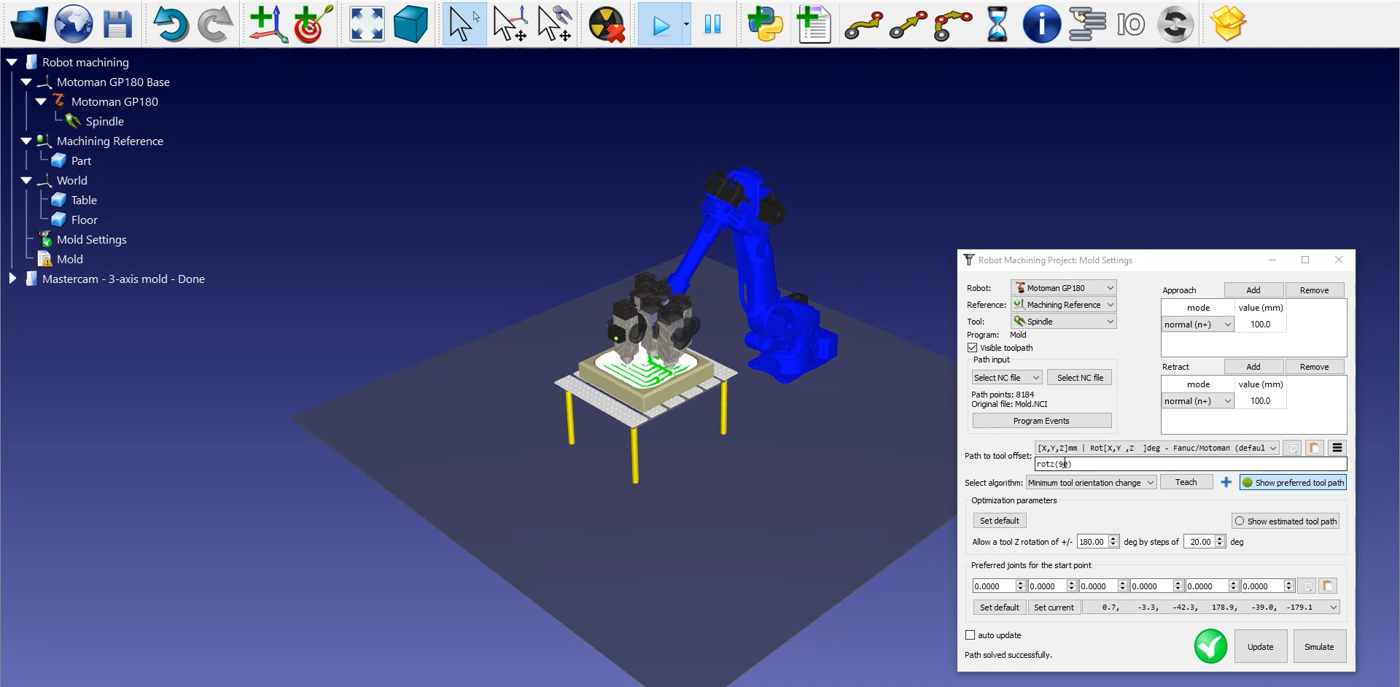
1.Clicchi due volte su
2.Selezioni Mostra percorso utensile preferito. Appariranno alcuni strumenti fantasma, come mostrato nell'immagine sottostante. Questi rappresentano la posizione del suo strumento lungo il percorso.
3.Modifichi il valore rotz (0) facendo scorrere la ruota fino a 90 gradi. Vedrà il valore rotz cambiare e la posizione dei pedaggi fantasma cambiare con esso.
4.Selezioni Aggiornamento➔ Simulazione.
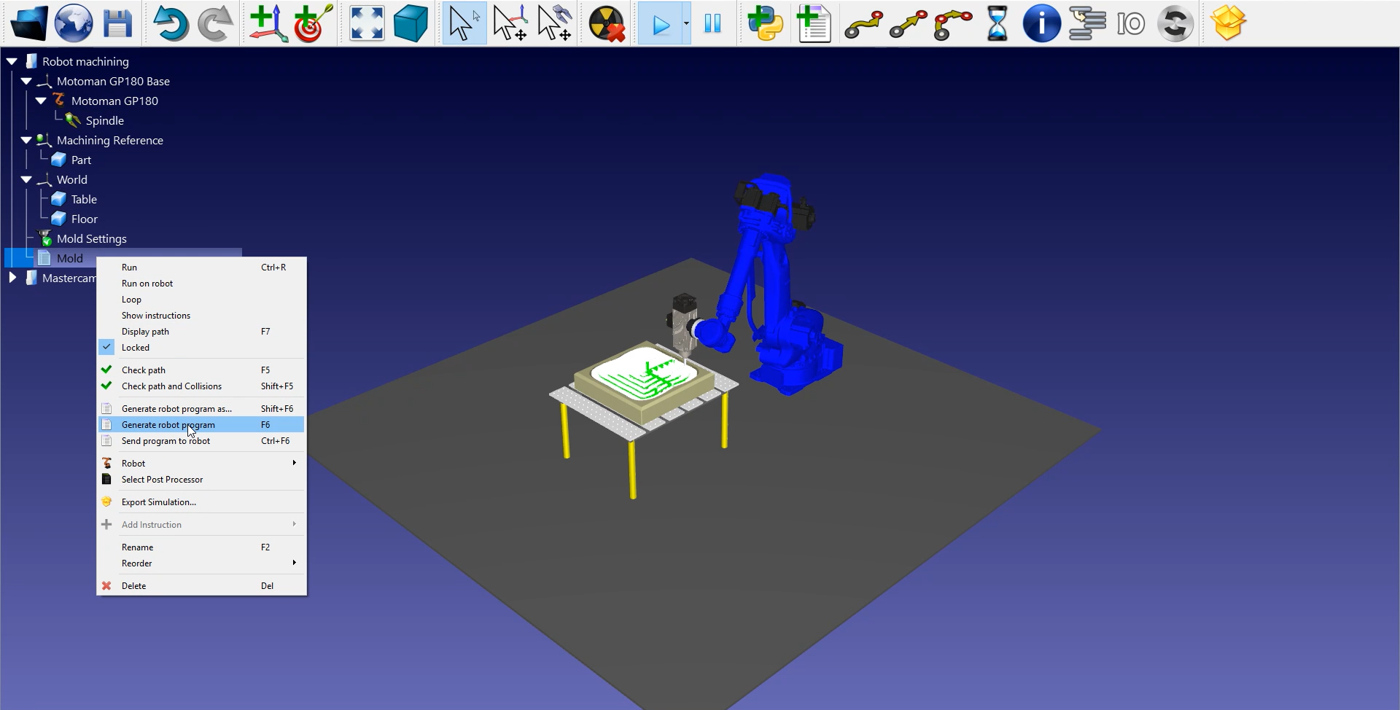
Per generare il programma del robot, si assicuri di utilizzare il post processor giusto. Clicchi due volte sul robot
Infine, faccia clic con il pulsante destro del mouse su
Il file Motoman JBI è ora pronto per essere trasferito al controllore del robot.