Crea percorso di lavorazione del robot
Può creare la simulazione di lavorazione del robot in RoboDK una volta caricato il file APT, selezionando Aggiorna. Questo le permette di vedere se il robot è in grado di eseguire l'operazione di produzione.
Questo esempio è una semplice lavorazione a 3 assi e le impostazioni predefinite ci danno un risultato valido. Il progetto di lavorazione robot le consente di controllare il comportamento del robot lungo il percorso di lavorazione.
Può seguire questi passaggi per aggiornare le restanti operazioni di lavorazione del robot:
1.Seleziona una o più lavorazioni robotiche (tenendo premuto Shift può generare più elementi nella struttura).
2.Clicchi con il tasto destro del mouse sull'elemento o sugli elementi selezionati.
3.Selezionare Aggiorna programmi.
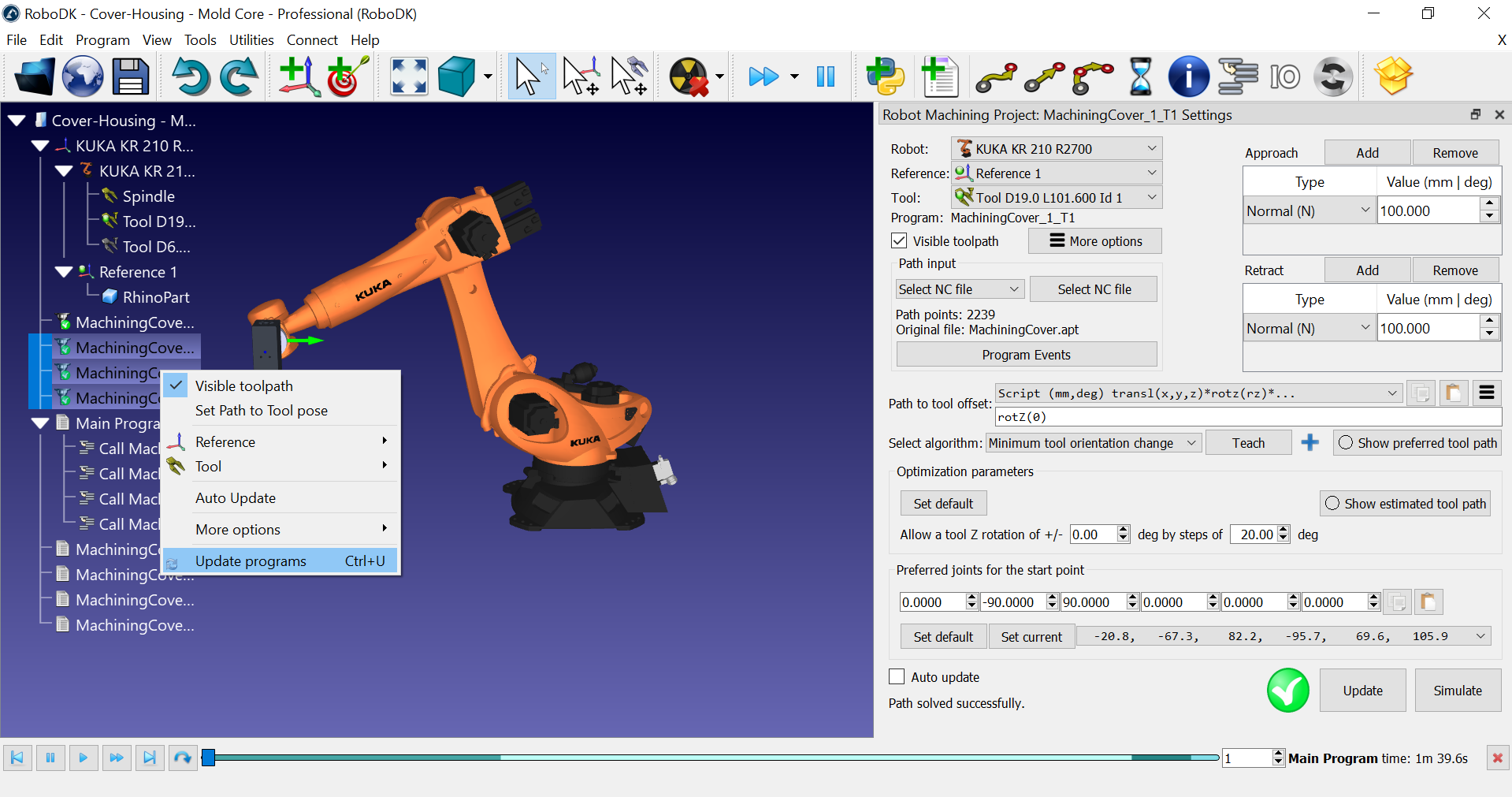
Mentre RoboDK calcola il percorso di lavorazione del robot, creerà un nuovo programma robot per ogni operazione di lavorazione. Le icone bianche rappresentano i programmi del robot. Questi programmi vengono creati automaticamente da RoboDK. Può simulare ogni programma individualmente facendo doppio clic su di esso nell'albero.
RoboDK crea anche automaticamente un programma principale che può eseguire per simulare tutte le operazioni di lavorazione del robot in ordine.