Genera i programmi del robot
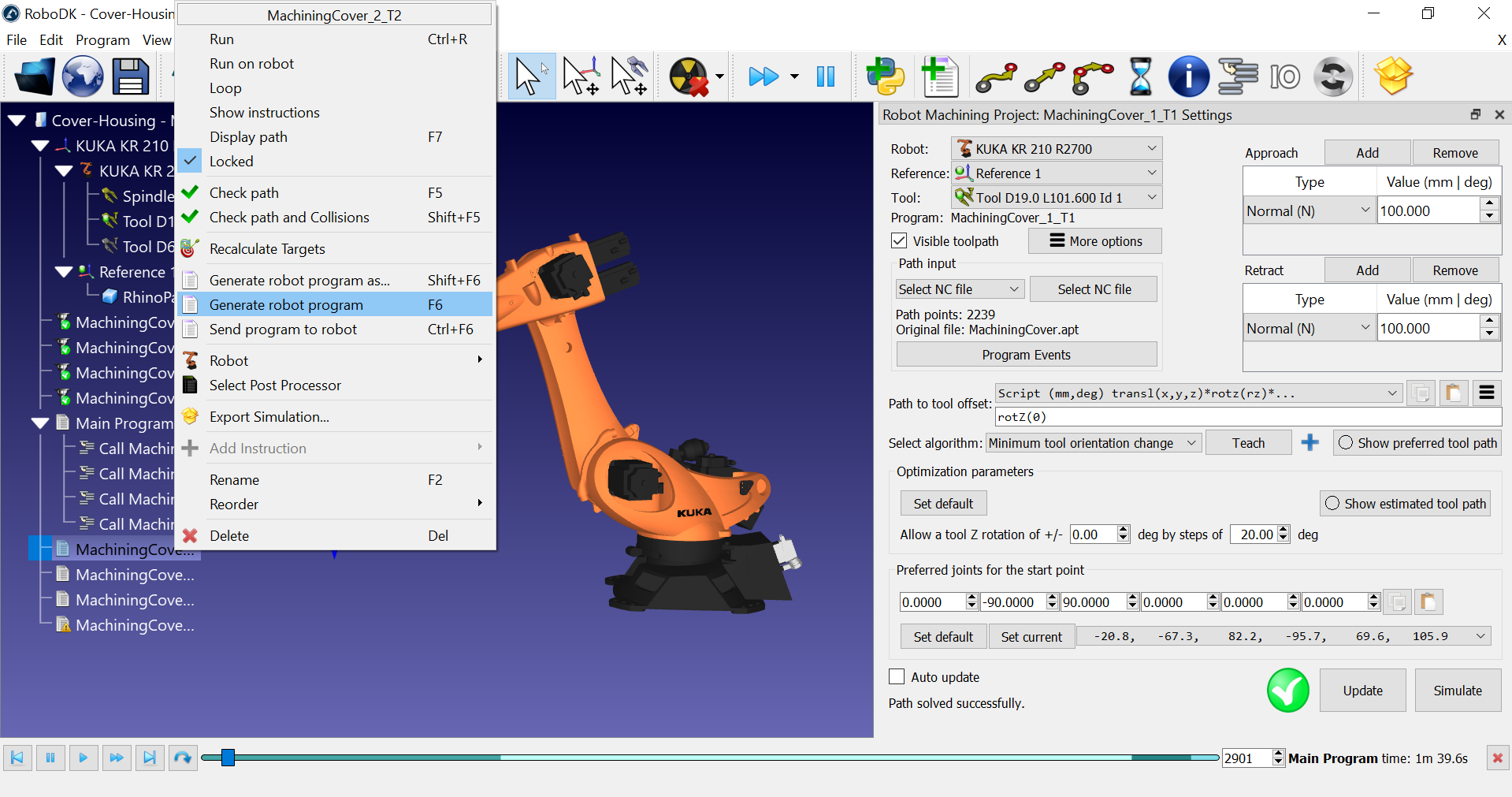
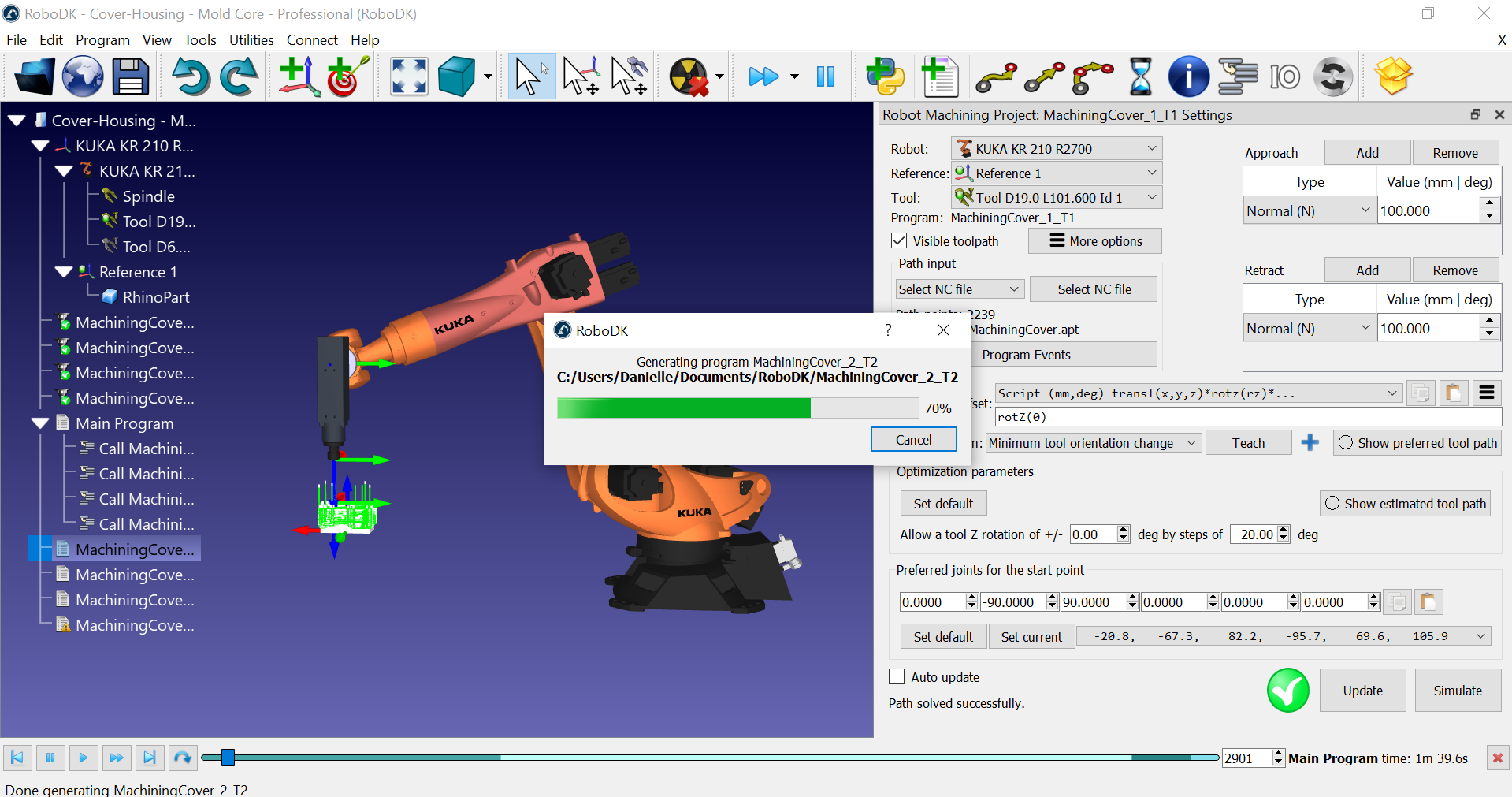
Può fare clic con il pulsante destro del mouse su uno o più programmi e selezionare Genera i programmi del robot per generare o aggiornare i programmi del robot (file) per il suo controller robot.
In questo esempio, se stiamo utilizzando un controller robot KUKA KRC, otterremo i file di programma SRC.
Dovrebbe vedere il riferimento e lo strumento definiti nel programma nello stesso modo in cui li ha definiti in RoboDK.
Può anche utilizzare i riferimenti numerici e i nomi degli strumenti per utilizzare i valori memorizzati nel controllore, dato il loro ID.
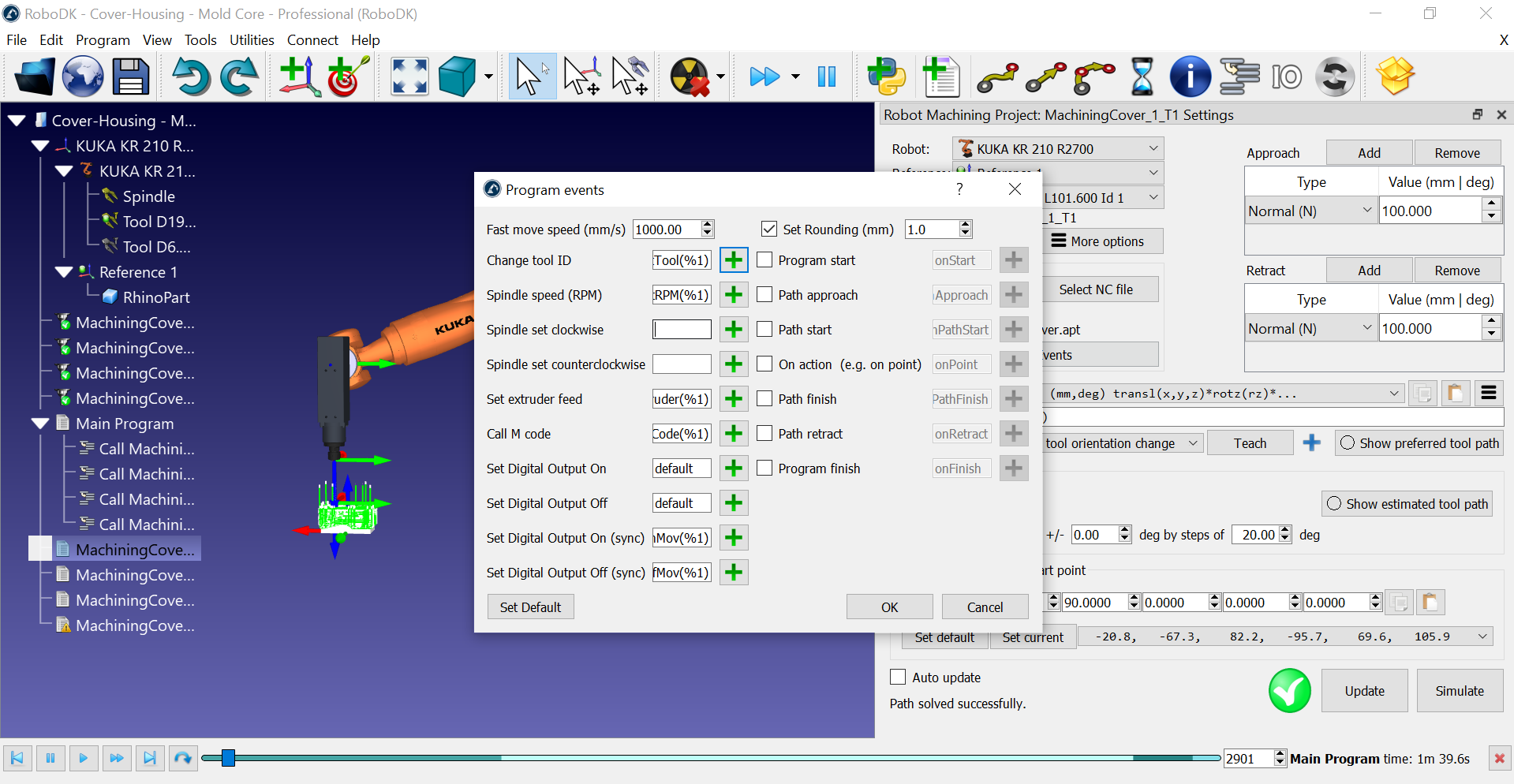
È possibile vedere le chiamate di programma personalizzate per selezionare l'utensile corretto in base all'ID utensile e attivare il mandrino. Queste impostazioni possono essere personalizzate nel menu Eventi di programma. Può attivare una procedura speciale sul controllore del robot quando deve essere eseguito un determinato comando di lavorazione, come ad esempio il cambio dell'utensile, la velocità del mandrino o l'esecuzione di codici M.