Personalizzare l'orientamento dello strumento
La maggior parte delle operazioni di lavorazione o di produzione prevede un vincolo a 5 assi. Mentre la posizione dell'utensile (TCP) e dell'asse di taglio è definita, si ha un ulteriore grado di libertà da definire quando si utilizza un braccio robotico a 6 assi. Questo grado di libertà ci permette di girare intorno all'asse di taglio e di evitare automaticamente le singolarità e i limiti degli assi.
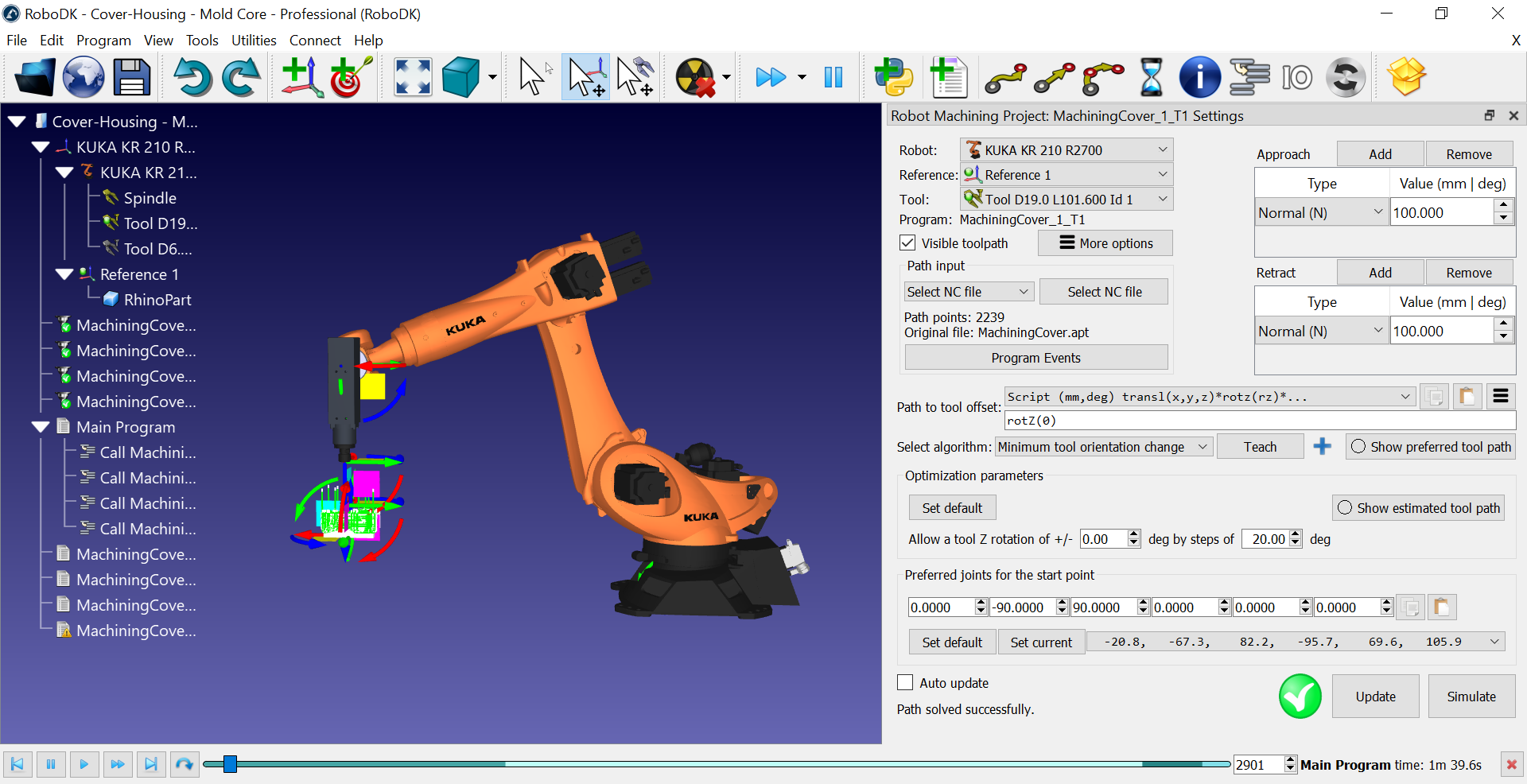
Il modo più semplice per personalizzare l'orientamento dell'utensile è selezionare il pulsante Insegna nel progetto di lavorazione del robot. Selezionando Insegna, dice a RoboDK che vuole seguire l'orientamento attuale dell'utensile, per cui le impostazioni si regoleranno in base a tale orientamento.
Selezionando Mostra percorso utensile preferito, possiamo vedere in anteprima l'orientamento dell'utensile che il robot sta cercando di seguire.
Può selezionare Aggiorna e Simula per vedere il risultato.
I parametri di ottimizzazione consentono al robot di cambiare automaticamente l'orientamento dell'utensile se non riesce a raggiungere l'orientamento preferito. Questo parametro è importante se ha un pezzo grande, se sta lavorando vicino a una singolarità o ai limiti dell'area di lavoro del robot. Se vede un segno rosso, significa che il robot non può eseguire l'operazione.
Se seleziona Mostra percorso utensile stimato, dovrebbe vedere in verde le posizioni raggiungibili. Le darà un suggerimento su come sarà l'orientamento per rendere il percorso fattibile. Questo significa che stiamo utilizzando il grado di libertà aggiuntivo per evitare automaticamente le singolarità del robot e i limiti degli assi.