Programma di lavorazione in RhinoCAM
Questa sezione mostra come esportare un lavoro di lavorazione dal software Mecsoft RhinoCAM a RoboDK. Un file APT viene utilizzato per caricare il percorso utensile in RoboDK e inviato automaticamente utilizzando un file BAT personalizzato.
Segua questi passaggi in RhinoCAM per esportare il lavoro di lavorazione in RoboDK:
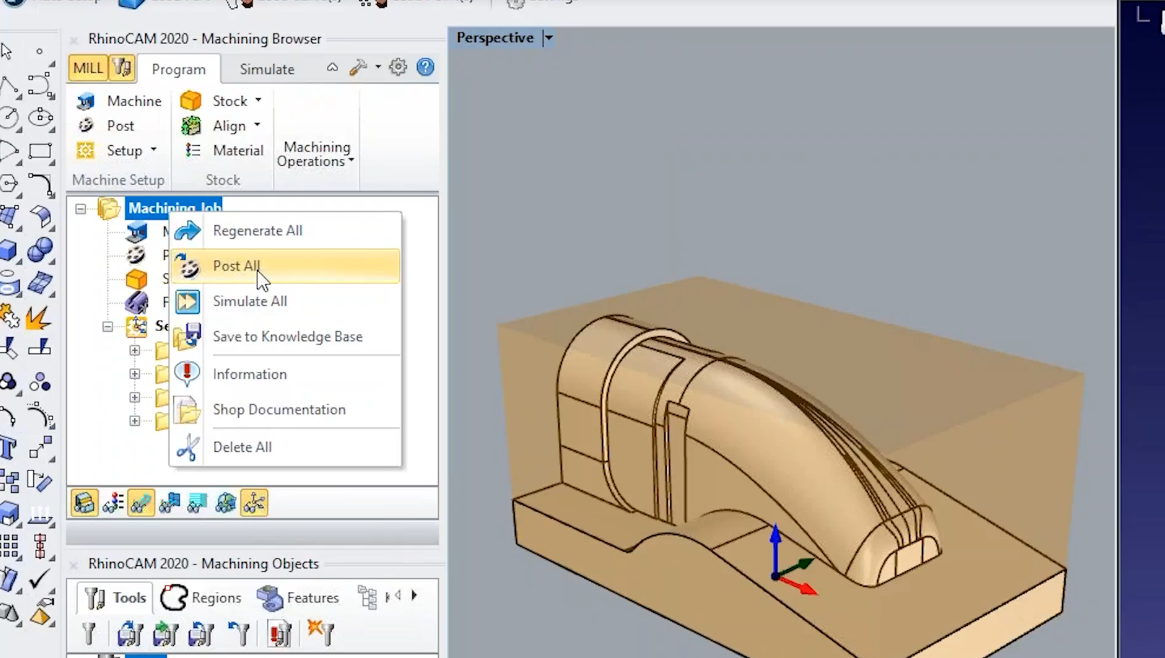
1.Clicchi con il tasto destro del mouse sul suo progetto di lavorazione da RhinoCAM.
2.Selezioni Post All per generare i programmi di lavorazione e caricare automaticamente tutto in RoboDK.
Si può vedere che RoboDK divide automaticamente il programma di lavorazione del robot nelle stesse 4 operazioni di lavorazione che abbiamo creato nel software CAM.
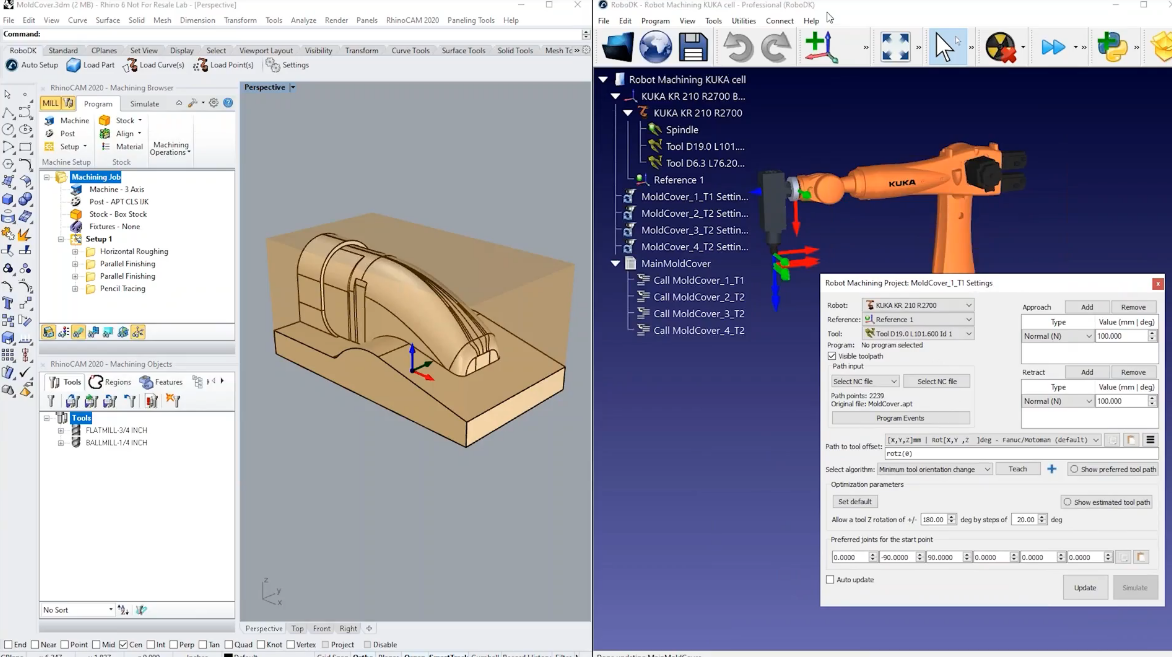
Il progetto di fresatura robotizzata viene creato utilizzando una cella robotica predefinita che possiamo personalizzare. In questo esempio utilizziamo un robot KUKA e un mandrino predefinito, dove l'utensile (o TCP) rappresenta il portautensili.
Per impostazione predefinita, quando si caricano i programmi APT, RoboDK aggiunge gli utensili definiti nel suo progetto di lavorazione. Gli utensili saranno aggiunti al TCP attivo quando si carica il file APT. Gli utensili corretti saranno anche preselezionati nel progetto di lavorazione del robot.