Robot Machining
Introduzione
Questo esempio la aiuterà a capire le basi della fresatura robotizzata in RoboDK e come convertire un lavoro di fresatura robotizzata a 3 assi in una simulazione di fresatura robotizzata e in un programma robotico.
Una volta definita la strategia di lavorazione con il suo software CAM, può esportare il programma di lavorazione come Gcode o come file APT, in modo da poterlo caricare in RoboDK per creare un progetto di lavorazione del robot. In questo esempio, utilizzeremo un file APT per creare un progetto di fresatura robotizzata.
Può trovare questo progetto campione RoboDK nella seguente posizione C:/RoboDK/Other/Plugin-MecSoft/Mold-Core.rdk.
Esempio di lavorazione con robot (3 assi)
In questo esempio, imparerà come convertire un programma di lavorazione in una simulazione di fresatura robotizzata e in un programma robot. Più precisamente, imparerà come generare programmi robotici validi per il suo controllore robot da file NC come un file APT.
Programma di lavorazione in RhinoCAM
Questa sezione mostra come esportare un lavoro di lavorazione dal software Mecsoft RhinoCAM a RoboDK. Un file APT viene utilizzato per caricare il percorso utensile in RoboDK e inviato automaticamente utilizzando un file BAT personalizzato.
Segua questi passaggi in RhinoCAM per esportare il lavoro di lavorazione in RoboDK:
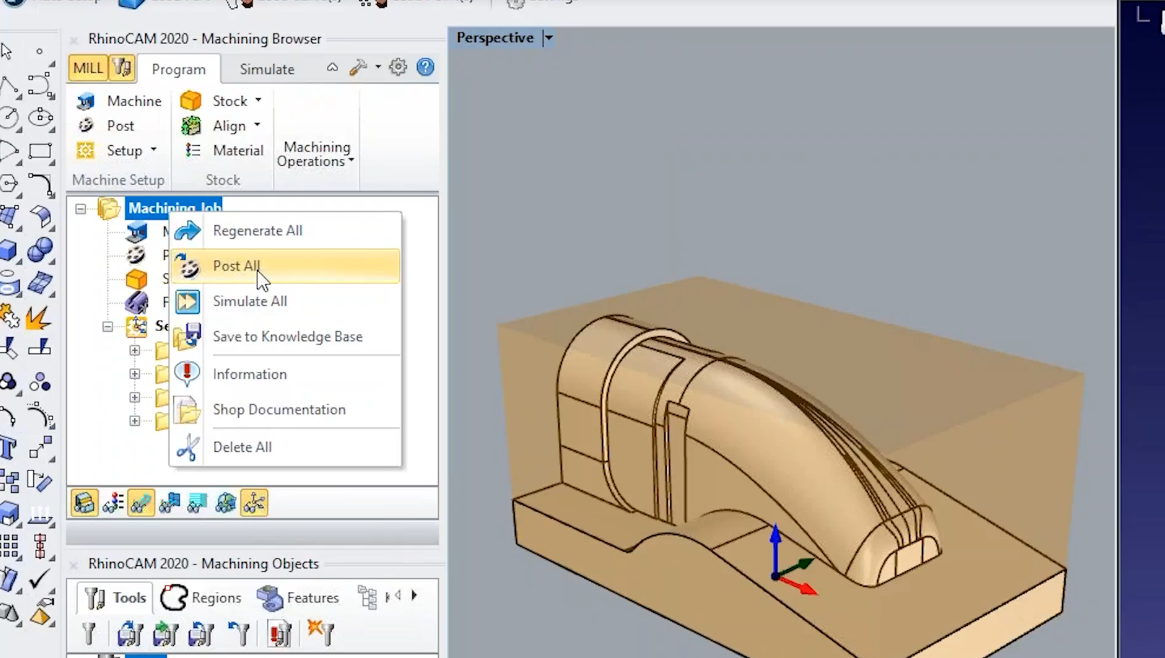
1.Clicchi con il tasto destro del mouse sul suo progetto di lavorazione da RhinoCAM.
2.Selezioni Post All per generare i programmi di lavorazione e caricare automaticamente tutto in RoboDK.
Si può vedere che RoboDK divide automaticamente il programma di lavorazione del robot nelle stesse 4 operazioni di lavorazione che abbiamo creato nel software CAM.
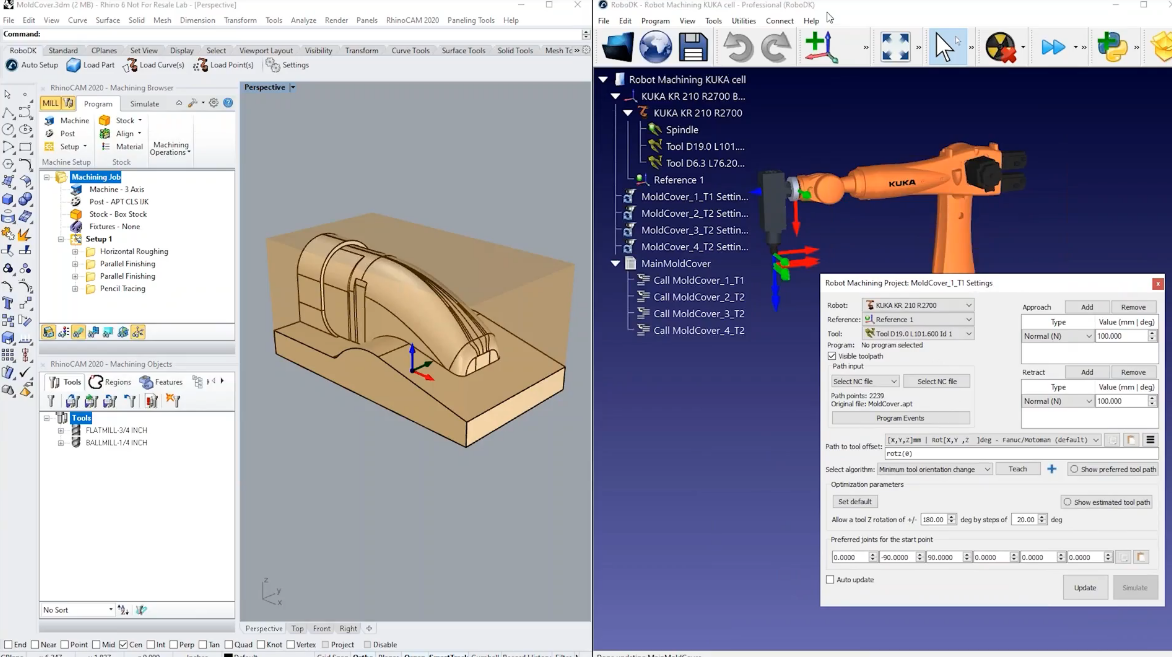
Il progetto di fresatura robotizzata viene creato utilizzando una cella robotica predefinita che possiamo personalizzare. In questo esempio utilizziamo un robot KUKA e un mandrino predefinito, dove l'utensile (o TCP) rappresenta il portautensili.
Per impostazione predefinita, quando si caricano i programmi APT, RoboDK aggiunge gli utensili definiti nel suo progetto di lavorazione. Gli utensili saranno aggiunti al TCP attivo quando si carica il file APT. Gli utensili corretti saranno anche preselezionati nel progetto di lavorazione del robot.
Progetto di lavorazione robot (3x)
Questa sezione mostra come personalizzare l'impostazione del robot e il percorso utensile di lavorazione per realizzare con successo la fresatura robotizzata. Il progetto di lavorazione di RoboDK le consente di convertire qualsiasi operazione di produzione generica a 3 o 5 assi in una simulazione di robot e in un programma di robot.
Poiché abbiamo caricato direttamente il file di lavorazione, tutto è stato creato e selezionato automaticamente. Possiamo anche personalizzare i movimenti di avvicinamento e ritrazione in RoboDK.
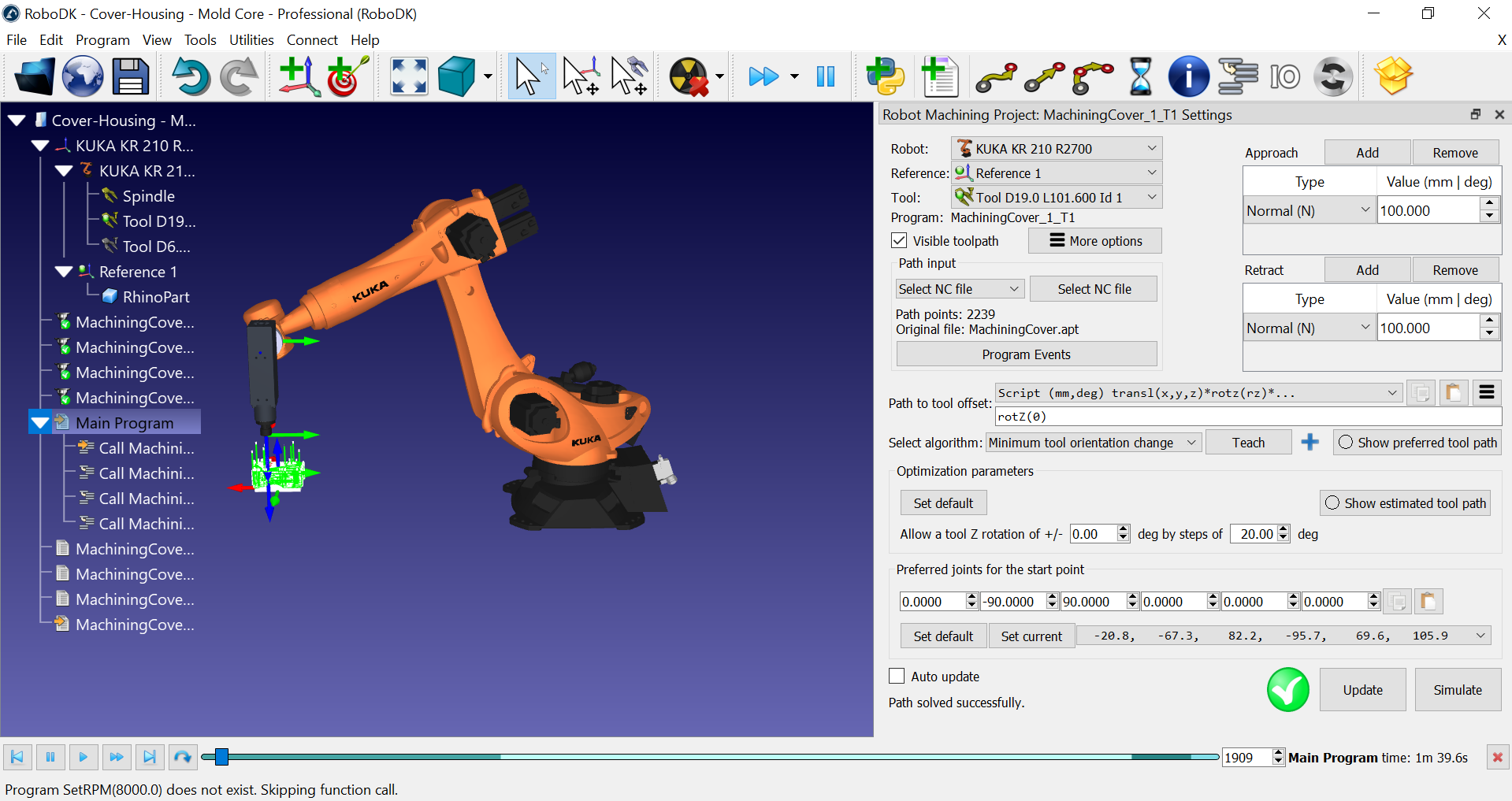
Crea percorso di lavorazione del robot
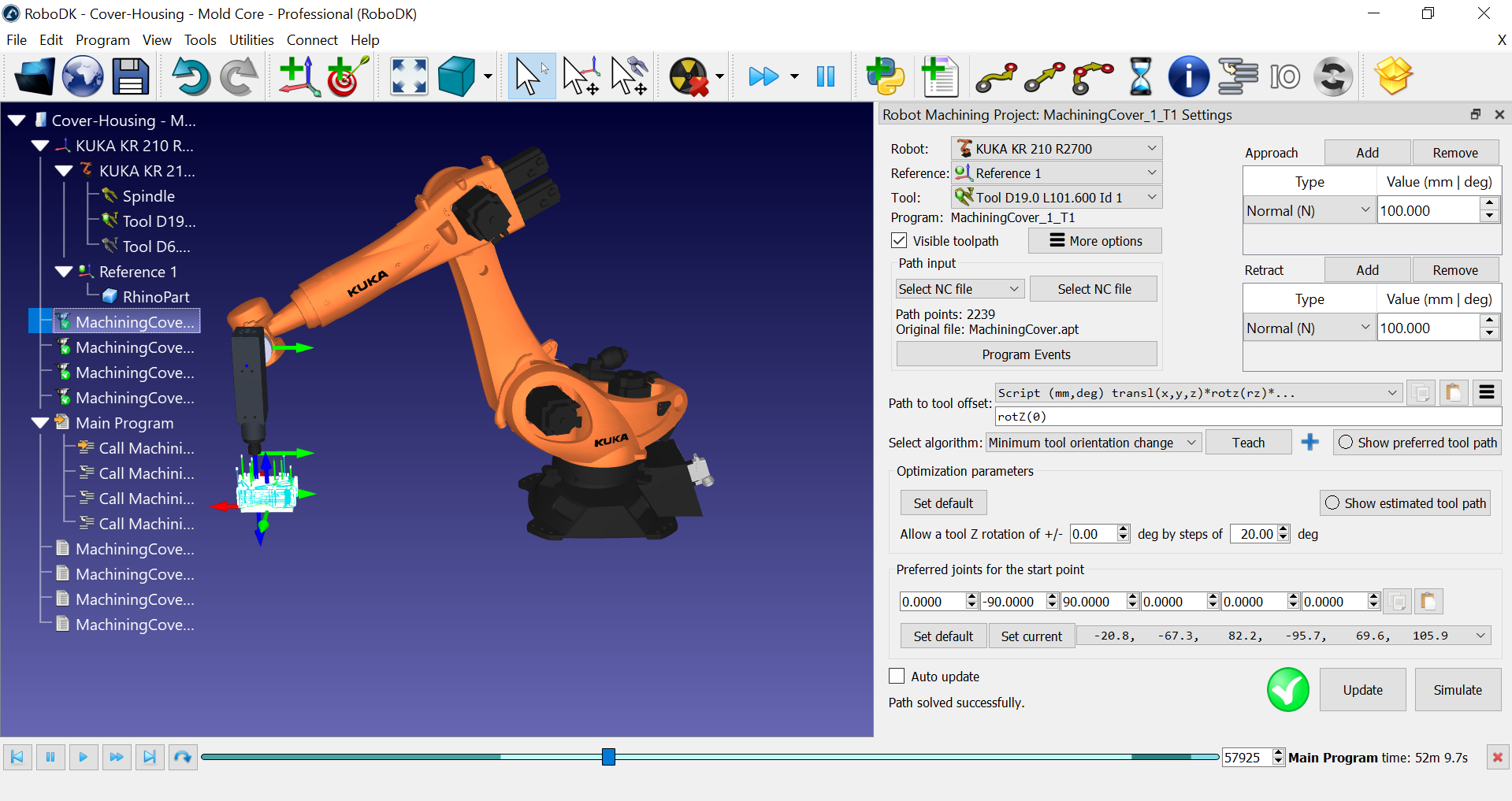
Può creare la simulazione di lavorazione del robot in RoboDK una volta caricato il file APT, selezionando Aggiorna. Questo le permette di vedere se il robot è in grado di eseguire l'operazione di produzione.
Questo esempio è una semplice lavorazione a 3 assi e le impostazioni predefinite ci danno un risultato valido. Il progetto di lavorazione robot le consente di controllare il comportamento del robot lungo il percorso di lavorazione.
Può seguire questi passaggi per aggiornare le restanti operazioni di lavorazione del robot:
1.Seleziona una o più lavorazioni robotiche (tenendo premuto Shift può generare più elementi nella struttura).
2.Clicchi con il tasto destro del mouse sull'elemento o sugli elementi selezionati.
3.Selezionare Aggiorna programmi.
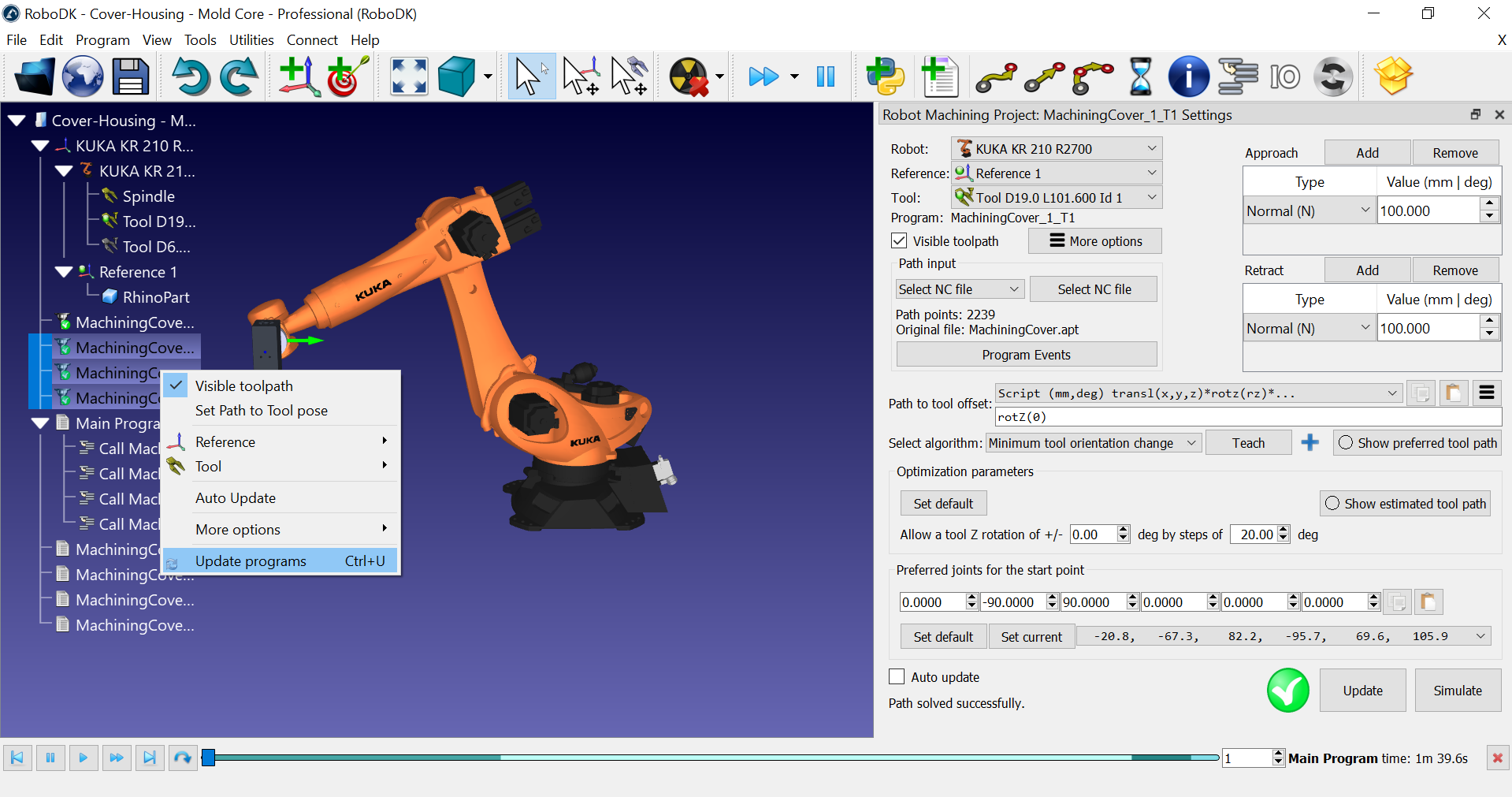
Mentre RoboDK calcola il percorso di lavorazione del robot, creerà un nuovo programma robot per ogni operazione di lavorazione. Le icone bianche rappresentano i programmi del robot. Questi programmi vengono creati automaticamente da RoboDK. Può simulare ogni programma individualmente facendo doppio clic su di esso nell'albero.
RoboDK crea anche automaticamente un programma principale che può eseguire per simulare tutte le operazioni di lavorazione del robot in ordine.
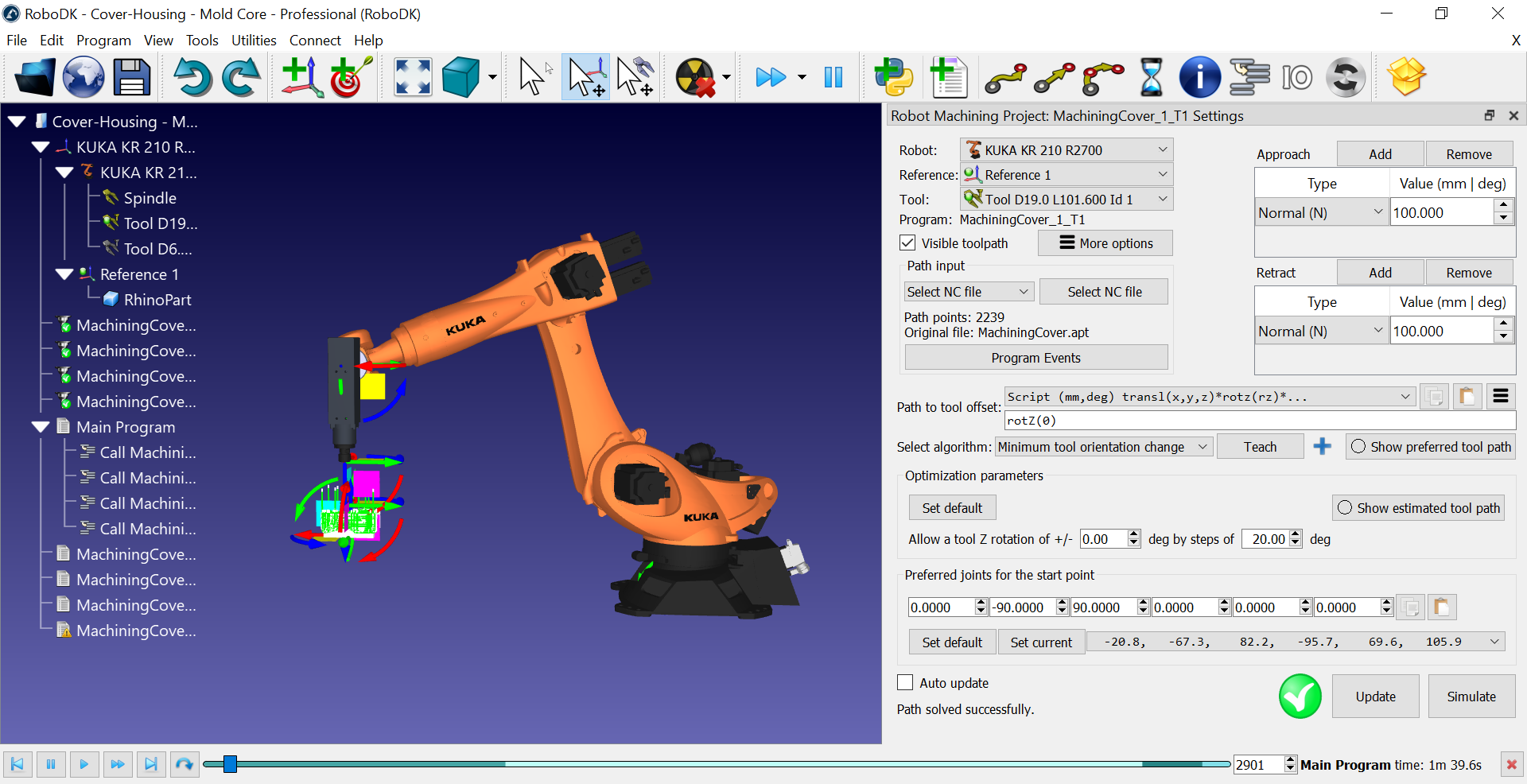
Simulare l'operazione di lavorazione del robot
Può fare doppio clic sul Programma principale per simulare l'intera operazione di lavorazione del robot. Può anche fare doppio clic su qualsiasi sottoprogramma per simularlo.
Personalizzare l'orientamento dello strumento
La maggior parte delle operazioni di lavorazione o di produzione prevede un vincolo a 5 assi. Mentre la posizione dell'utensile (TCP) e dell'asse di taglio è definita, si ha un ulteriore grado di libertà da definire quando si utilizza un braccio robotico a 6 assi. Questo grado di libertà ci permette di girare intorno all'asse di taglio e di evitare automaticamente le singolarità e i limiti degli assi.
Il modo più semplice per personalizzare l'orientamento dell'utensile è selezionare il pulsante Insegna nel progetto di lavorazione del robot. Selezionando Insegna, dice a RoboDK che vuole seguire l'orientamento attuale dell'utensile, per cui le impostazioni si regoleranno in base a tale orientamento.
Selezionando Mostra percorso utensile preferito, possiamo vedere in anteprima l'orientamento dell'utensile che il robot sta cercando di seguire.
Può selezionare Aggiorna e Simula per vedere il risultato.
I parametri di ottimizzazione consentono al robot di cambiare automaticamente l'orientamento dell'utensile se non riesce a raggiungere l'orientamento preferito. Questo parametro è importante se ha un pezzo grande, se sta lavorando vicino a una singolarità o ai limiti dell'area di lavoro del robot. Se vede un segno rosso, significa che il robot non può eseguire l'operazione.
Se seleziona Mostra percorso utensile stimato, dovrebbe vedere in verde le posizioni raggiungibili. Le darà un suggerimento su come sarà l'orientamento per rendere il percorso fattibile. Questo significa che stiamo utilizzando il grado di libertà aggiuntivo per evitare automaticamente le singolarità del robot e i limiti degli assi.
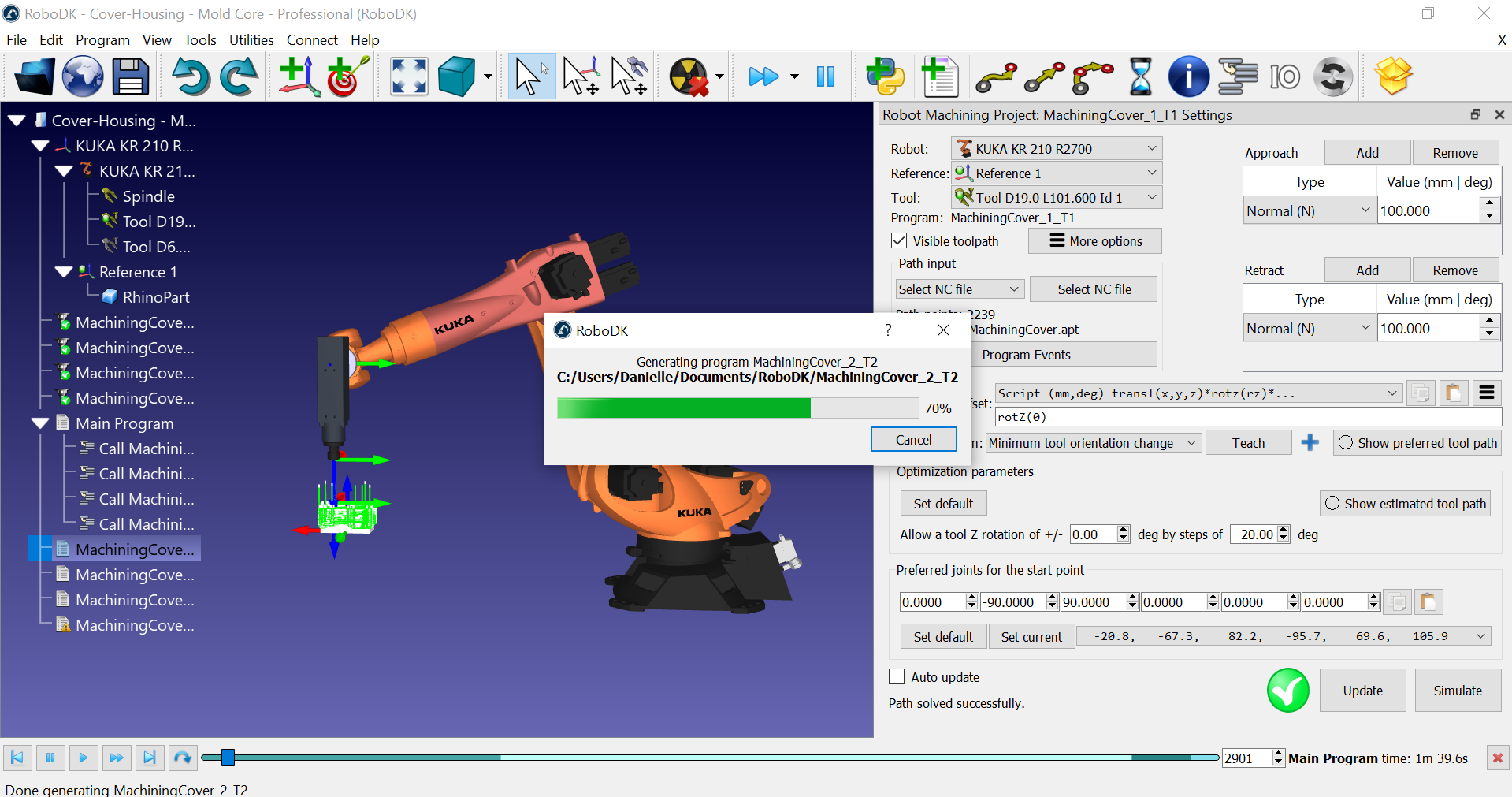
Genera i programmi del robot
Può fare clic con il pulsante destro del mouse su uno o più programmi e selezionare Genera i programmi del robot per generare o aggiornare i programmi del robot (file) per il suo controller robot.
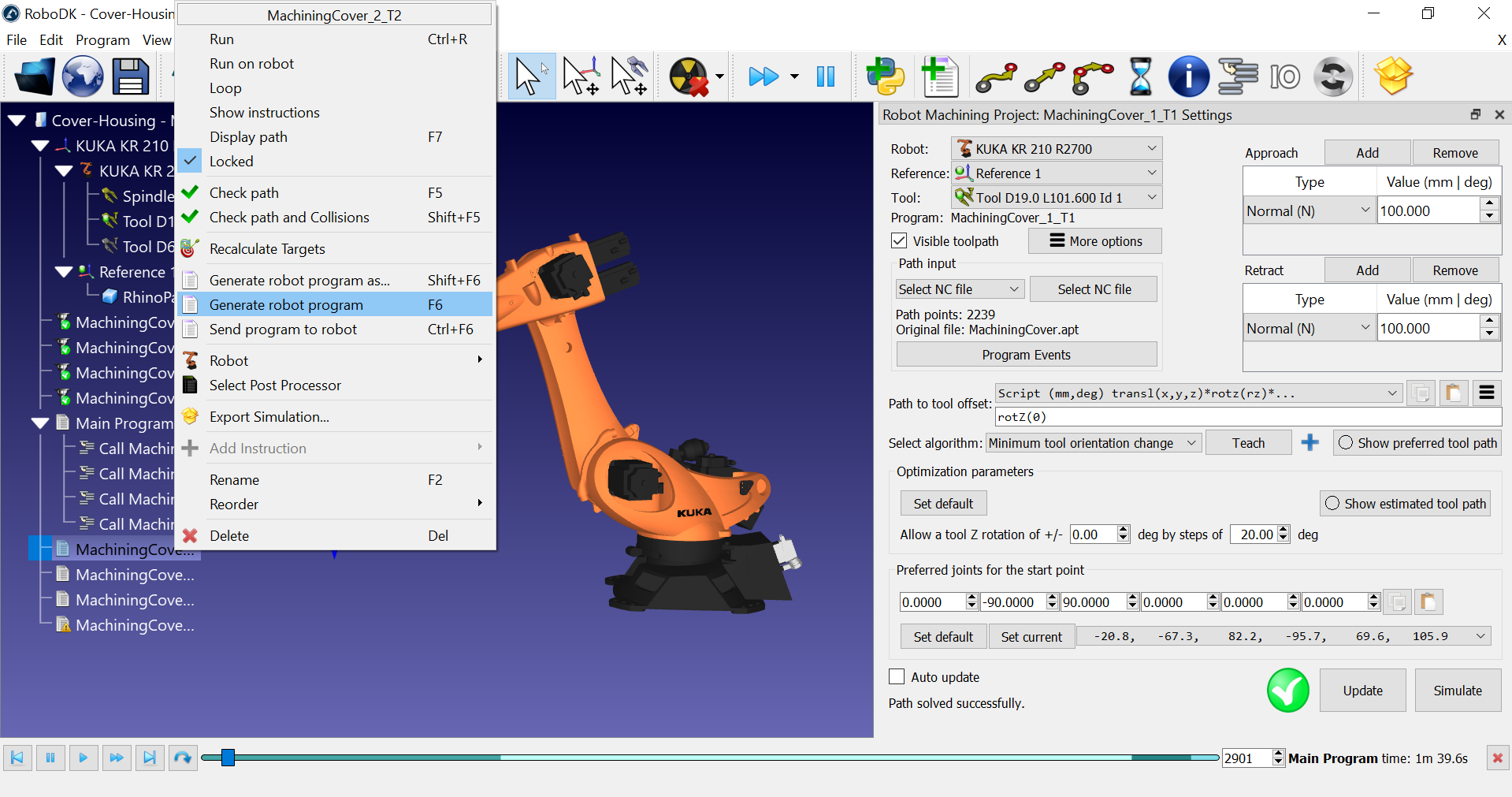
In questo esempio, se stiamo utilizzando un controller robot KUKA KRC, otterremo i file di programma SRC.
Dovrebbe vedere il riferimento e lo strumento definiti nel programma nello stesso modo in cui li ha definiti in RoboDK.
Può anche utilizzare i riferimenti numerici e i nomi degli strumenti per utilizzare i valori memorizzati nel controllore, dato il loro ID.
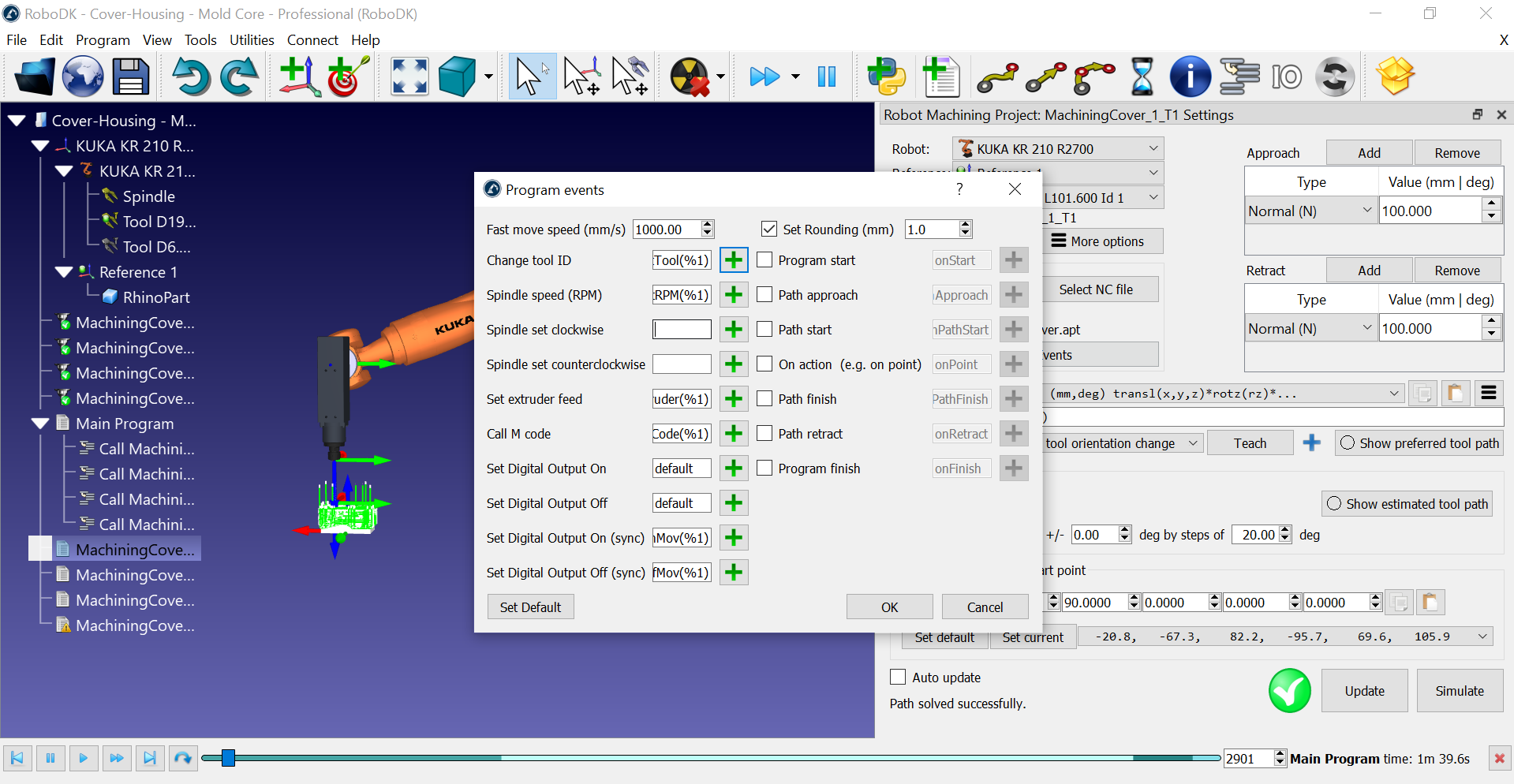
È possibile vedere le chiamate di programma personalizzate per selezionare l'utensile corretto in base all'ID utensile e attivare il mandrino. Queste impostazioni possono essere personalizzate nel menu Eventi di programma. Può attivare una procedura speciale sul controllore del robot quando deve essere eseguito un determinato comando di lavorazione, come ad esempio il cambio dell'utensile, la velocità del mandrino o l'esecuzione di codici M.
Cambiare il Post Processor
A ogni robot è associato un postprocessore predefinito che dovrebbe generare un codice valido per il suo controller robot. Può facilmente cambiare l'output del programma in base al controller del robot che utilizza.
Segua la seguente procedura per cambiare il post processor:
1.Clicchi con il tasto destro del mouse su un programma o un robot.
2.Selezionare Seleziona Processore post per cambiare il processore post.
Questa impostazione si applica a tutti i programmi che utilizzano lo stesso robot.
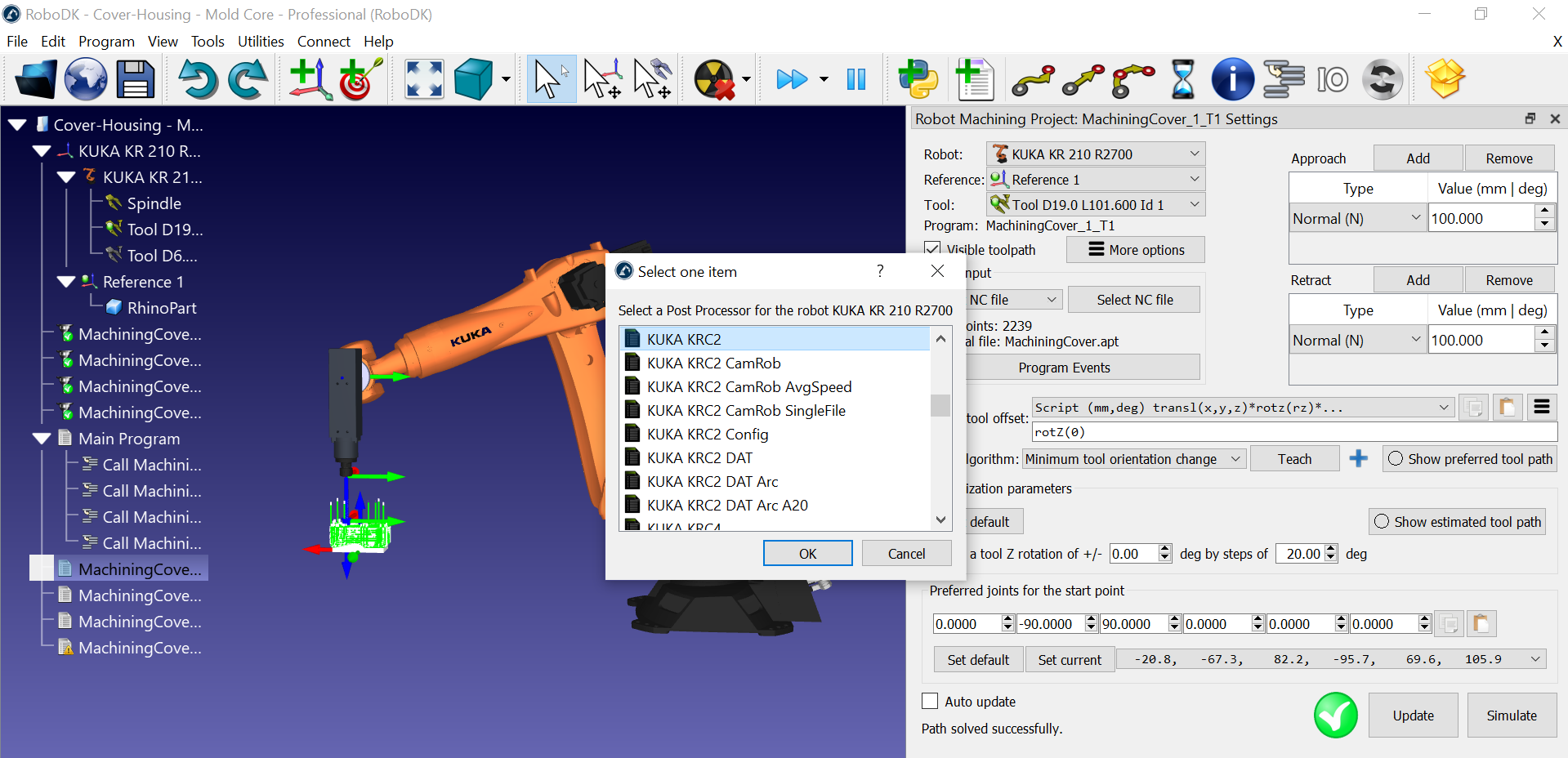
Se ha un robot KUKA, dovrebbe vedere il postprocessore KUKA KRC2 selezionato per impostazione predefinita. Questo dovrebbe essere compatibile anche con i controller KUKA KRC4. Se preferisce, può comunque selezionare il post processor KUKA KRC4 se possiede un controller KRC4.