Taglio robotico in RoboDK
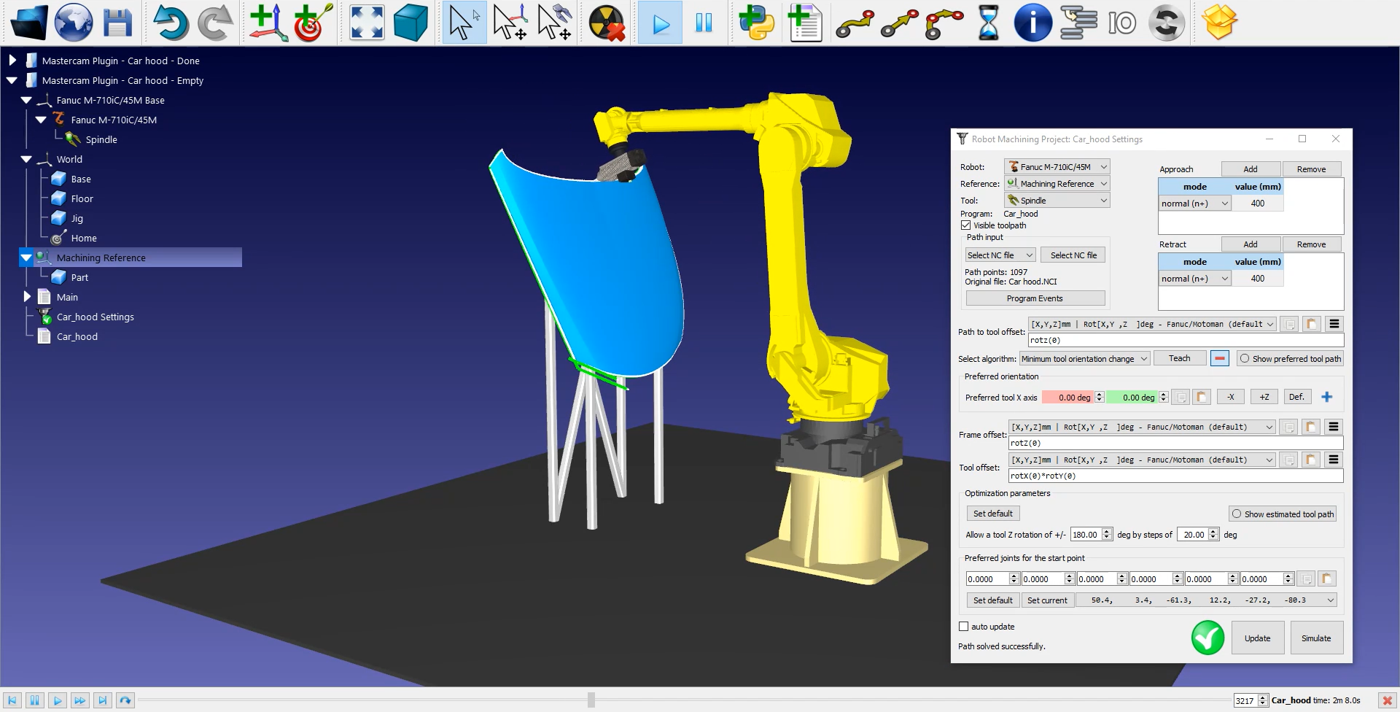
Una volta importato il percorso di taglio del robot in RoboDK, dovrebbe vedere il percorso dell'utensile di taglio collegato al riferimento stampo della sua stazione RoboDK. Nelle Impostazioni del cofano di
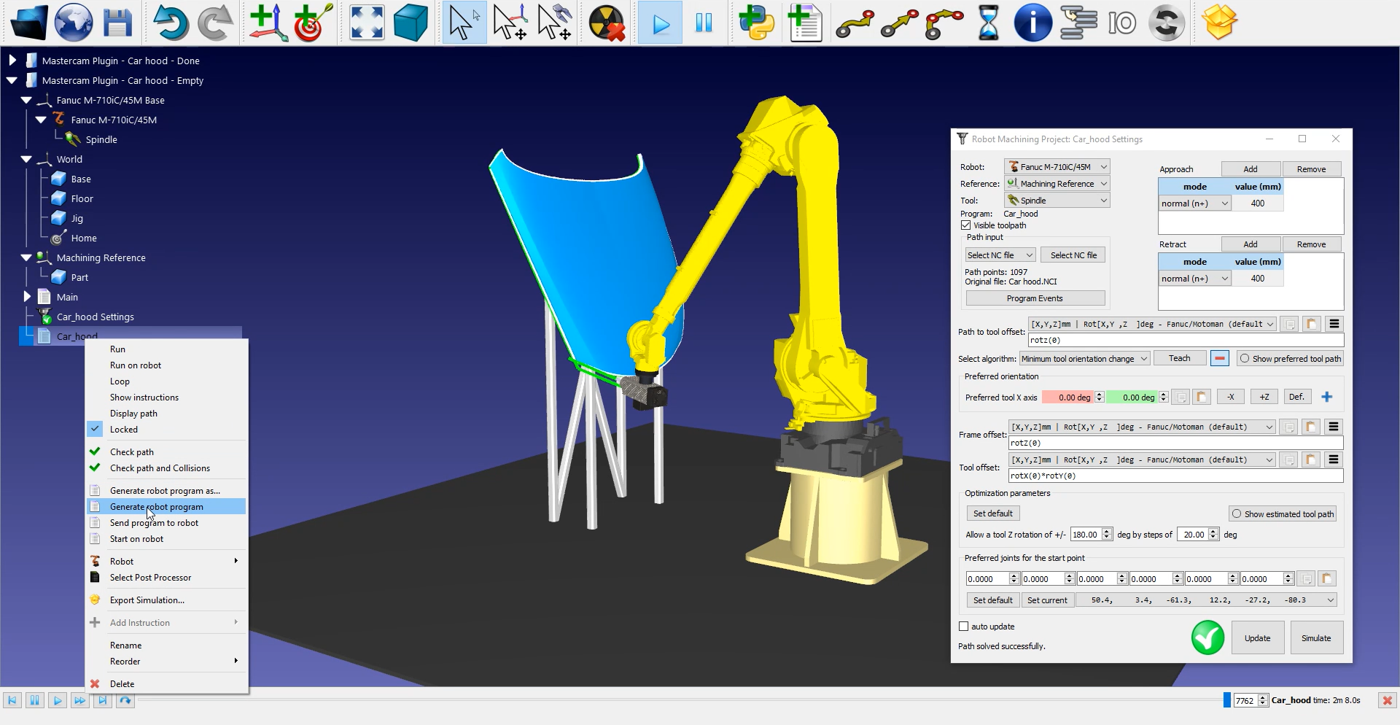
Può anche regolare il valore dei movimenti di avvicinamento e ritrazione prima e dopo il percorso di taglio. Un avvicinamento/ritracciamento di 400 mm dovrebbe essere sicuro in questo esempio. Questi movimenti sono ora 4 volte più lunghi rispetto all'avvicinamento/ritrazione predefinito e contribuiranno ad evitare qualsiasi collisione con il pezzo.
Può anche regolare l'orientamento della parte nella sezione inferiore del menu.
Il passo successivo consiste nel verificare se l'ordine in cui verranno eseguite le sezioni del percorso è corretto, selezionando

Per generare il programma del robot, si assicuri di utilizzare il post processor giusto. Clicchi due volte sul robot
Infine, faccia clic con il pulsante destro del mouse su
I file Fanuc LS e/o TP sono ora pronti per essere trasferiti al controllore del robot.