Robot Cutting
Introduzione
Questo esempio le mostrerà come può utilizzare RoboDK per la fresatura robotizzata a 5 assi, utilizzando il plugin Mastercam. In questo esempio, l'obiettivo è quello di tagliare il materiale in eccesso intorno al cofano di un'auto, utilizzando un robot Fanuc con un utensile da taglio montato su un mandrino
Video: Programmazione di robot con Mastercam per un'applicazione di taglio a 5 assi
Con il plug-in RoboDK per Mastercam può impostare rapidamente progetti di fresatura robotizzata direttamente da Mastercam a RoboDK. Questo plug-in le permette di programmare oltre 50 diversi produttori di robot e 500 robot.
Il plug-in RoboDK per Mastercam supporta i file NCI (file Mastercam nativi pre-elaborati) e i file APT CLS e G-code standard. Il plug-in è gratuito se ha acquistato una licenza RoboDK.
Taglio robotico a 5 assi
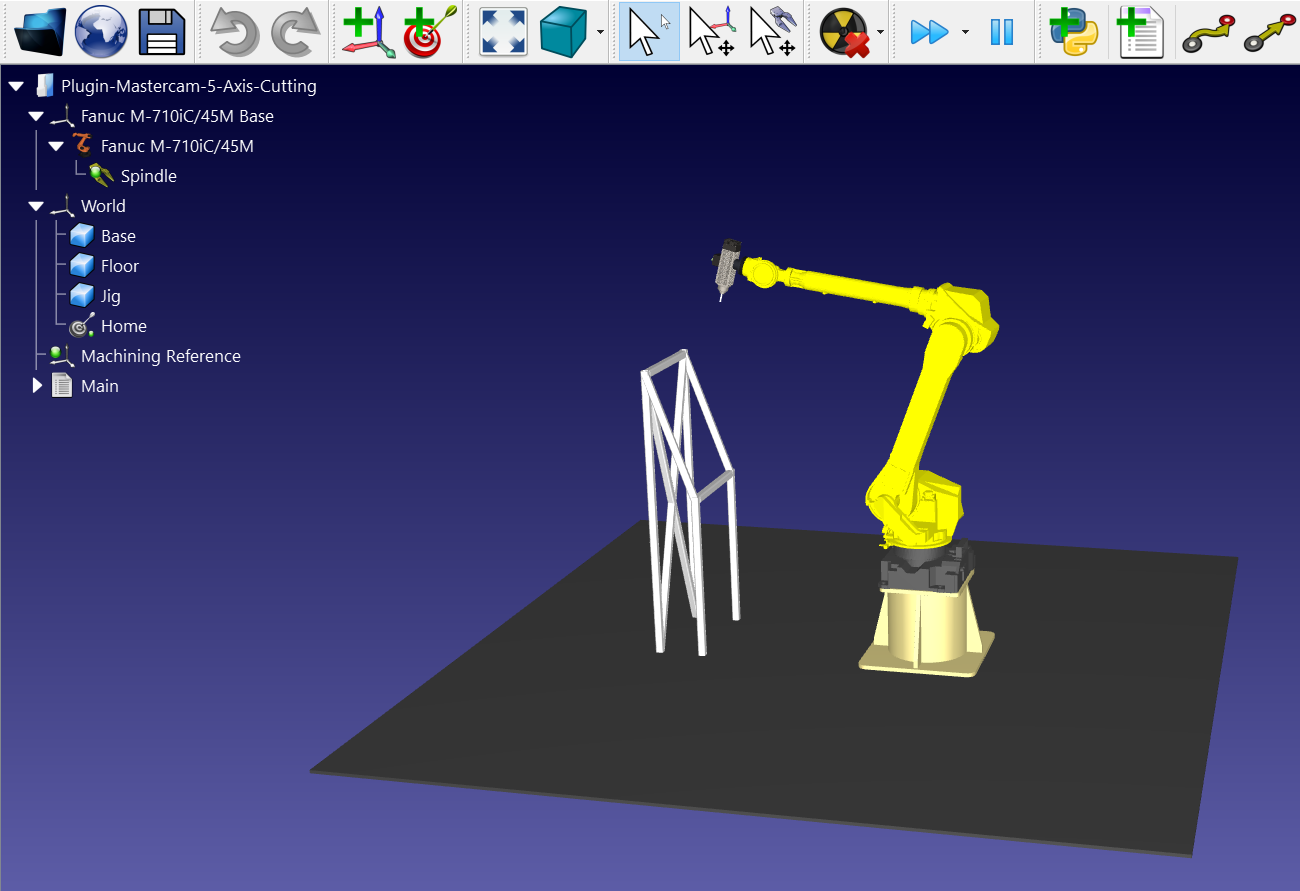
Per avviare il progetto, deve selezionare l'esempio di taglio a 5 assi di RoboDK nella libreria predefinita.
Impostazioni di RoboDK
Questo esempio utilizza il robot Fanuc M-710iC/45M, un utensile da taglio montato su un mandrino e una dima per tenere il cofano dell'auto.
Carica la stazione:
1.Selezionare File ➔
2.Individui l'esempio di taglio a 5 assi nella sezione esempi di RoboDK:
C:/RoboDK/Examples/ Plugin-Mastercam-5-Axis-Cutting.rdk.
Ora che ha caricato la stazione, può aprire Mastercam e caricare il progetto C:/RoboDK/Other/Plugin-Mastercam/Examples/Car hood.mcam.
Percorso utensile di taglio in Mastercam
Apra il suo oggetto 3D in Mastercam e lanci la simulazione di taglio. Si può notare che il software ha regolato l'orientamento dell'utensile per farlo corrispondere alla superficie di taglio
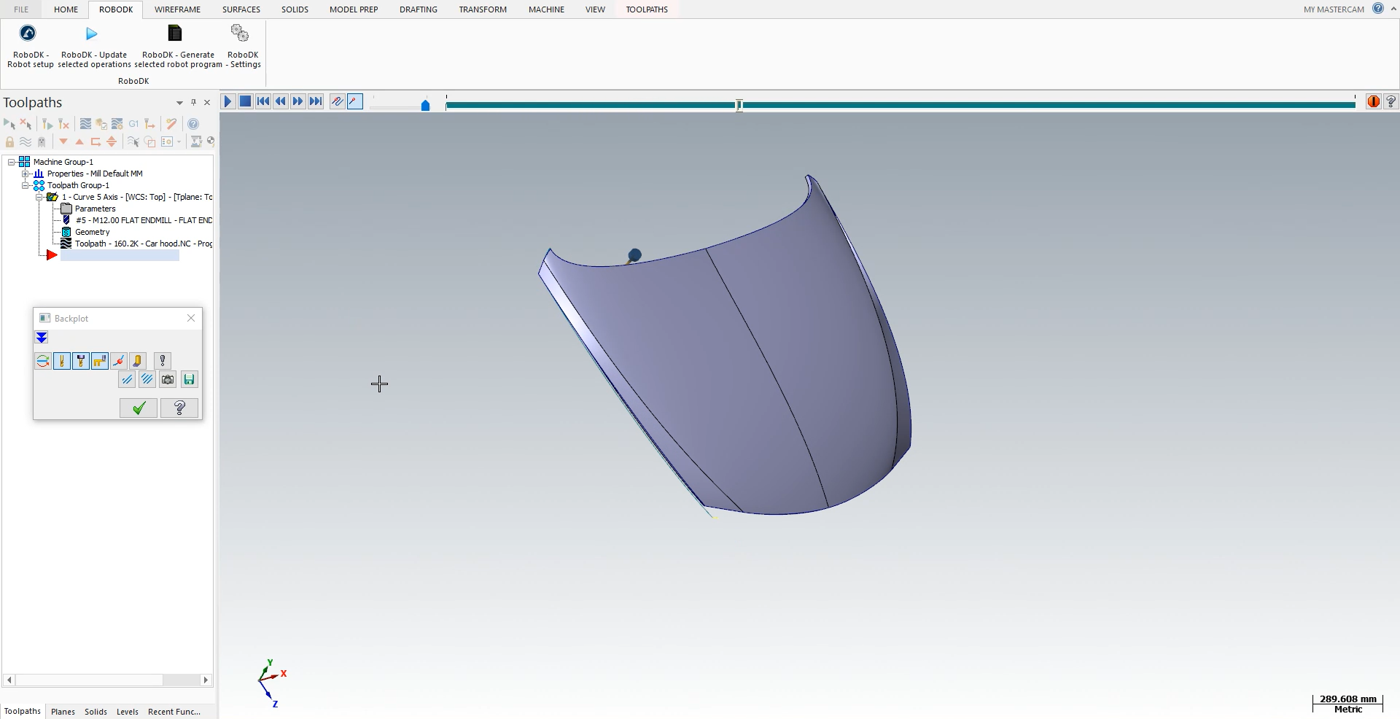
Segua i passi successivi per caricare la sua parte in RoboDK:
1.Selezioni la scheda RoboDK e selezioni RoboDK - Configurazione del robot.
2.Selezionare Carica parte.
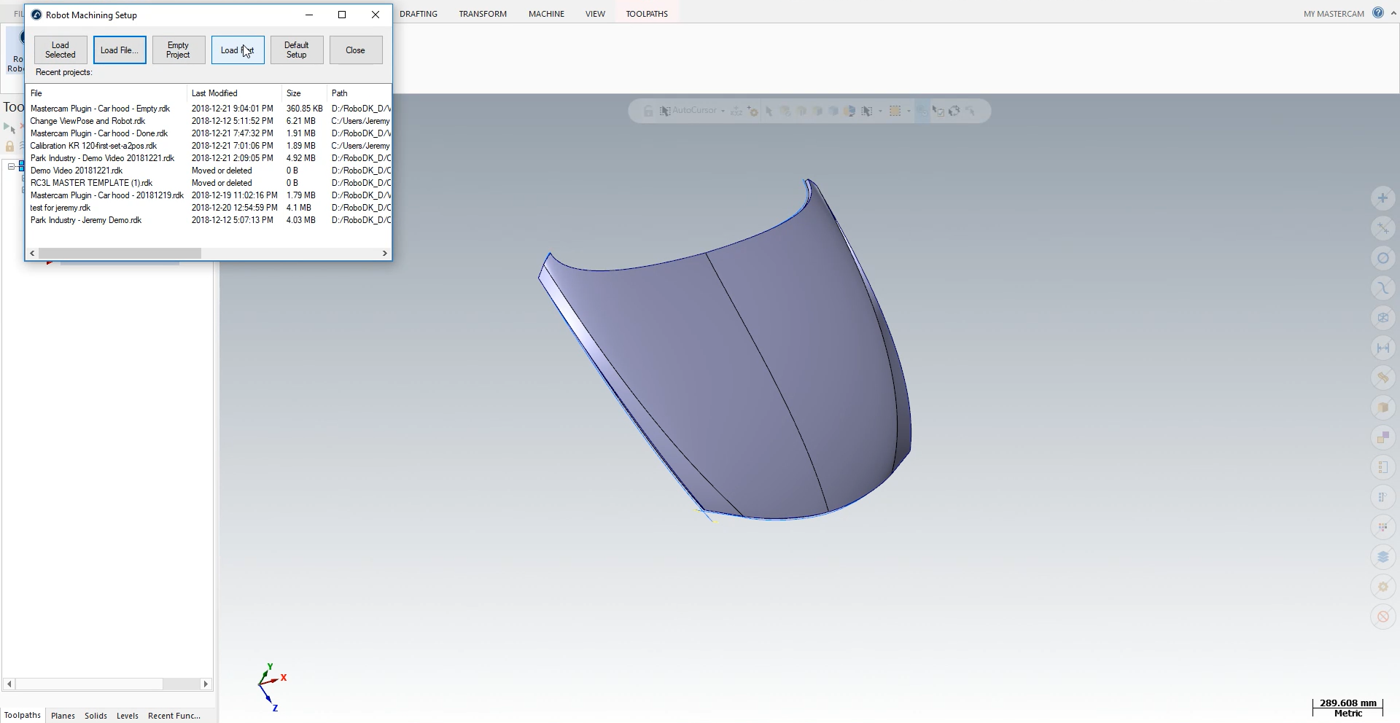
Dovrebbe vedere la parte caricata sul piano di riferimento attivo (riferimento di lavorazione) sulla dima della stazione RoboDK.
Il passo successivo consiste nell'importare il percorso di taglio da Mastercam a RoboDK.
1.Selezioni la scheda RoboDK in Mastercam.
2.Seleziona RoboDK - Aggiorna le operazioni selezionate.
3.Vada a RoboDK.
Taglio robotico in RoboDK
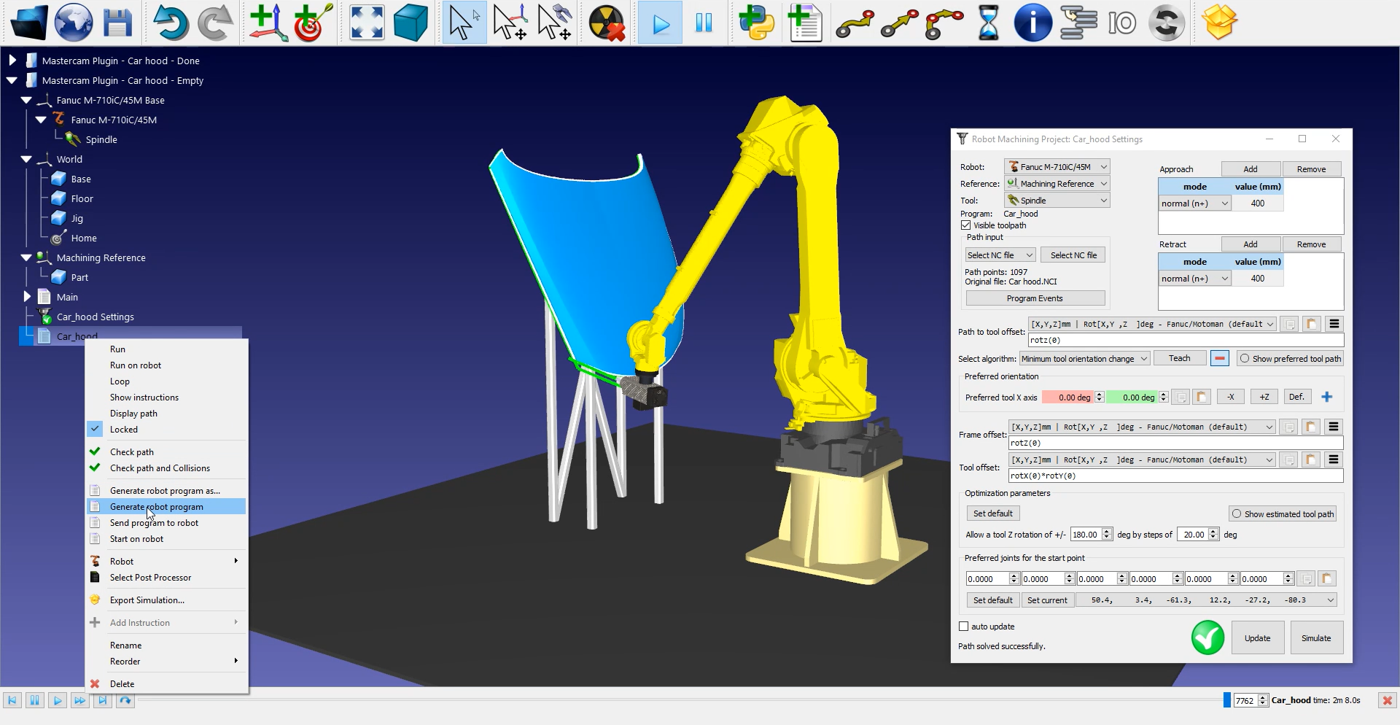
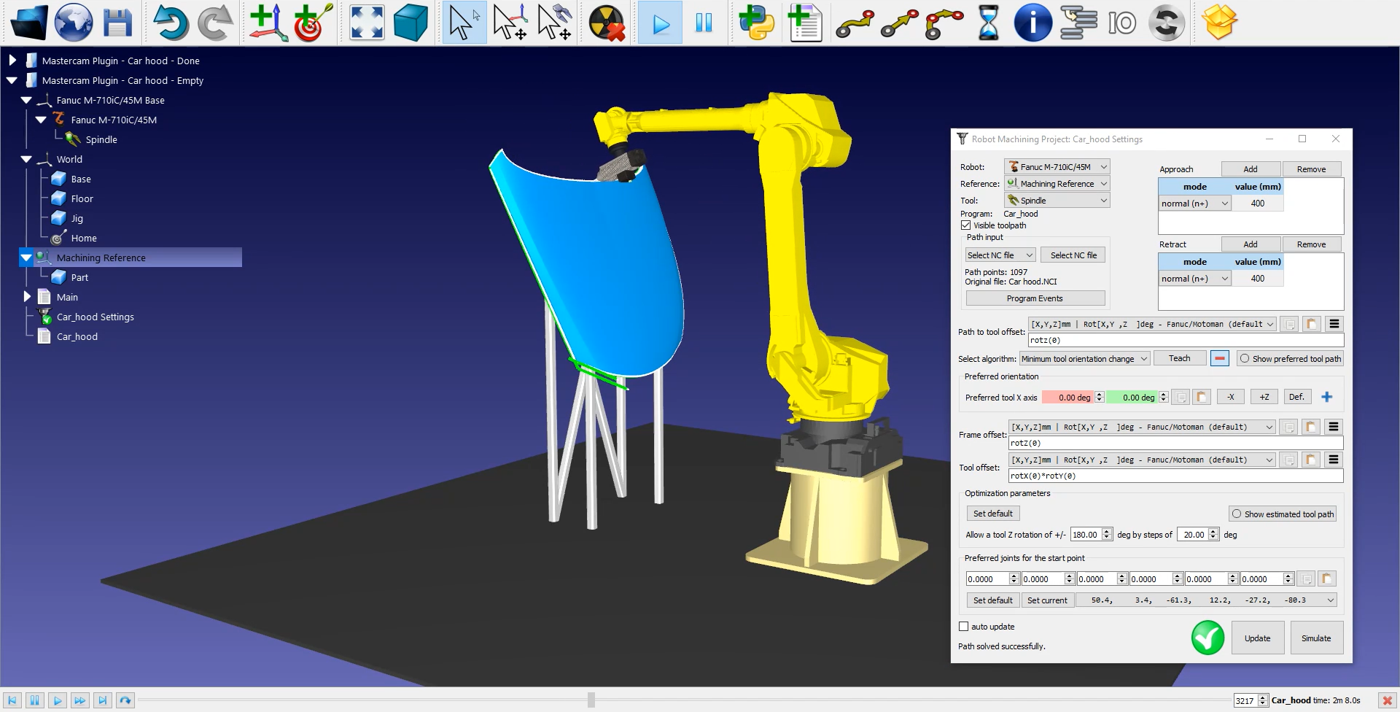
Una volta importato il percorso di taglio del robot in RoboDK, dovrebbe vedere il percorso dell'utensile di taglio collegato al riferimento stampo della sua stazione RoboDK. Nelle Impostazioni del cofano di
Può anche regolare il valore dei movimenti di avvicinamento e ritrazione prima e dopo il percorso di taglio. Un avvicinamento/ritracciamento di 400 mm dovrebbe essere sicuro in questo esempio. Questi movimenti sono ora 4 volte più lunghi rispetto all'avvicinamento/ritrazione predefinito e contribuiranno ad evitare qualsiasi collisione con il pezzo.
Può anche regolare l'orientamento della parte nella sezione inferiore del menu.
Il passo successivo consiste nel verificare se l'ordine in cui verranno eseguite le sezioni del percorso è corretto, selezionando

Per generare il programma del robot, si assicuri di utilizzare il post processor giusto. Clicchi due volte sul robot
Infine, faccia clic con il pulsante destro del mouse su
I file Fanuc LS e/o TP sono ora pronti per essere trasferiti al controllore del robot.