Crea il sistema di coordinate di lavorazione del robot
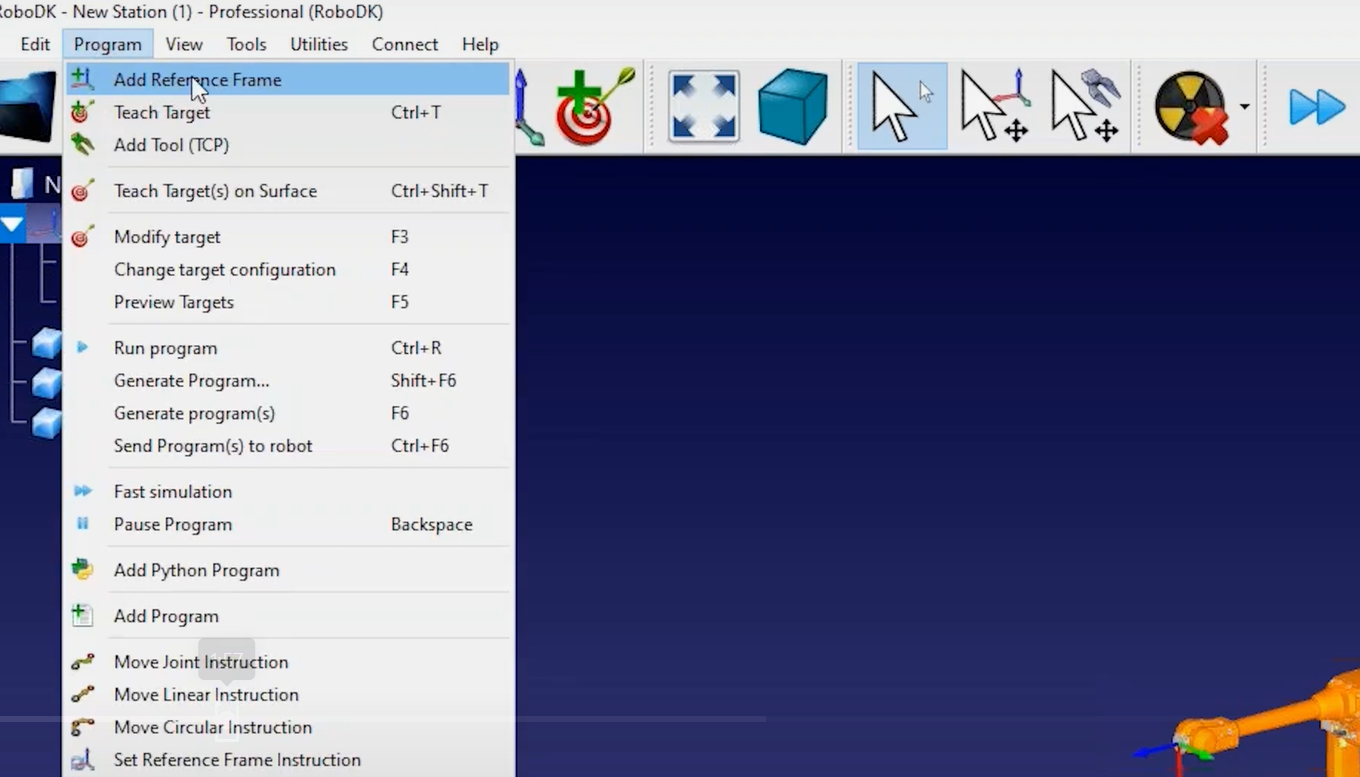
Può creare un nuovo sistema di coordinate per la sua attrezzatura di fresatura robotizzata selezionando il menu Programma e poi Aggiungi piano di riferimento.
Segua questi passaggi per definire correttamente lo strumento (TCP):
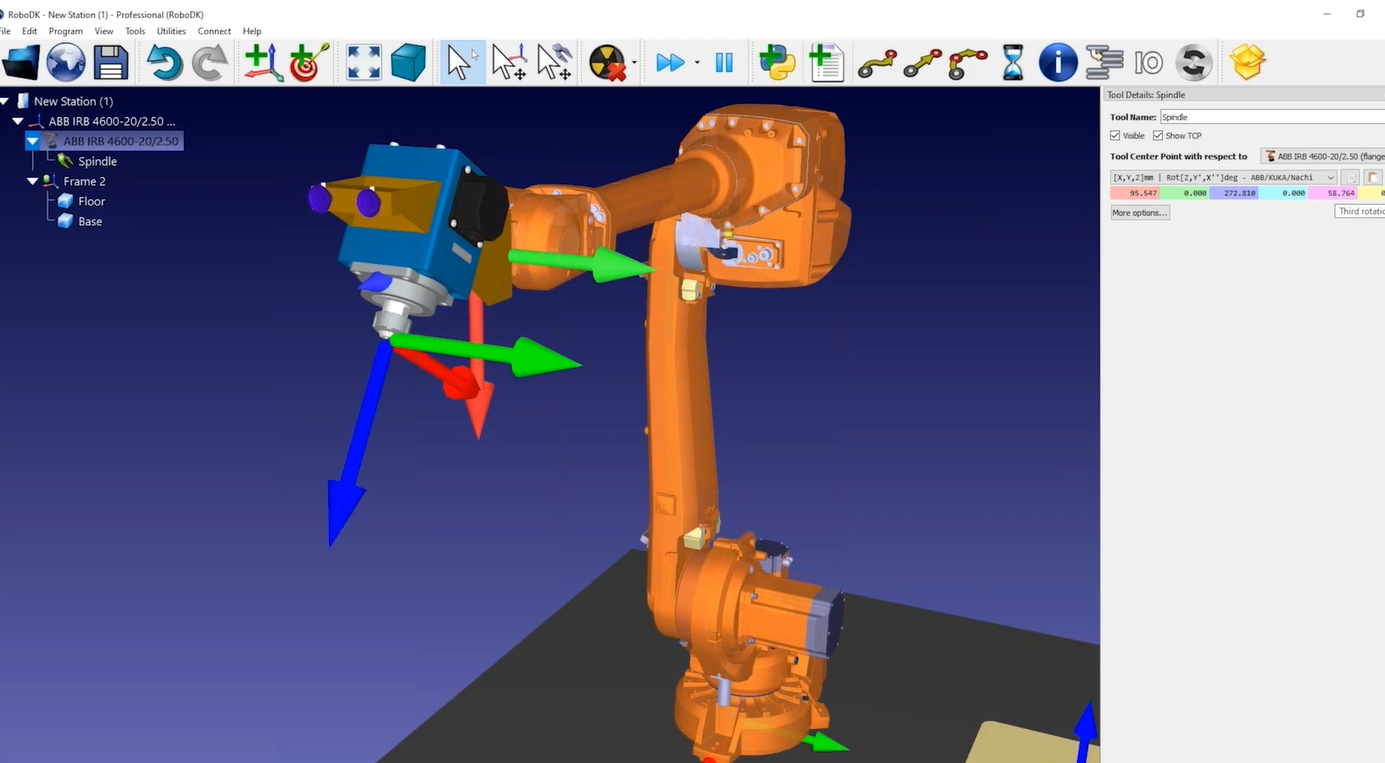
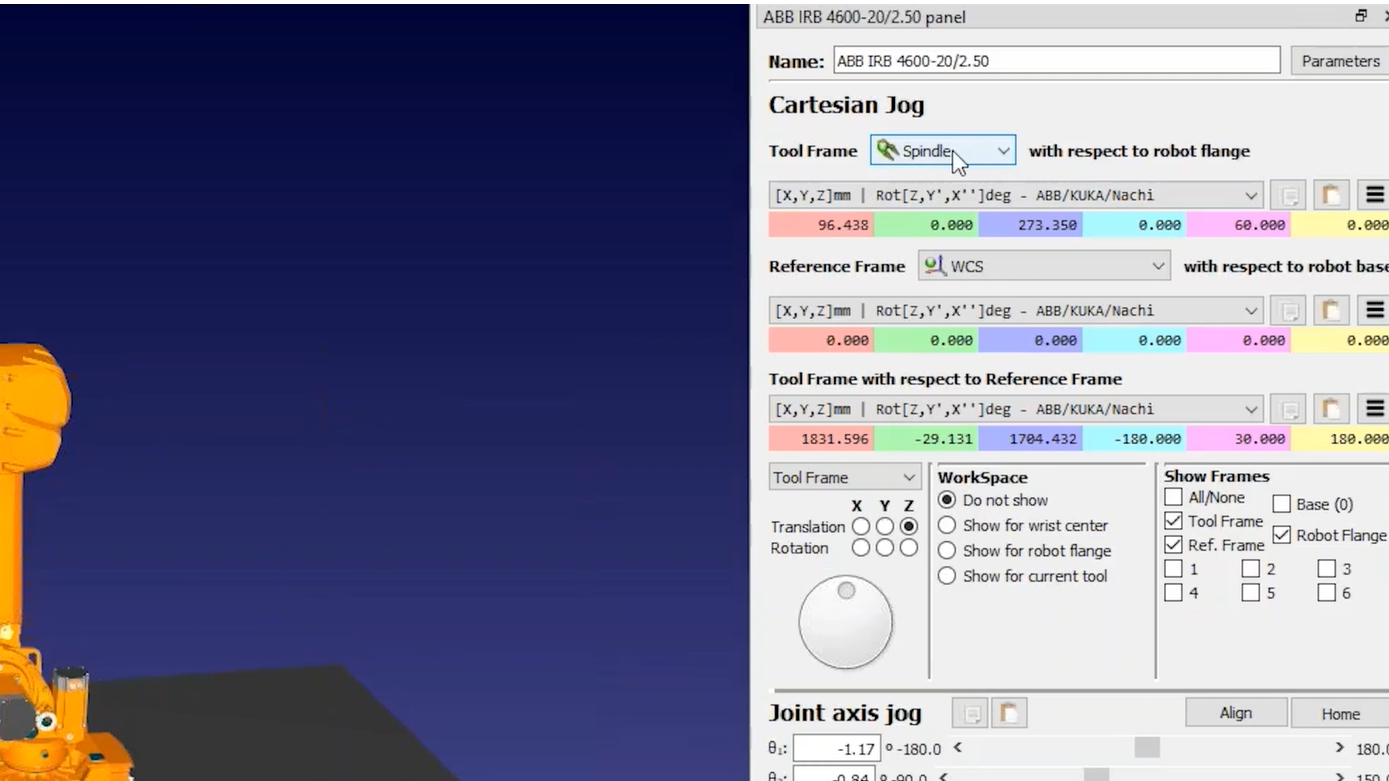
1.Può inserire le coordinate dell'utensile, se ne dispone (può scegliere tra diversi formati di orientamento specifici del fornitore per inserire la posa dell'utensile).
2.Tenendo premuto il tasto ALT, può spostare il robot o qualsiasi sistema di coordinate.
3.Tenendo premuti i tasti ALT e Shift, può modificare la posizione e l'orientamento del suo TCP.
Segua questi passaggi per aggiungere un altro sistema di coordinate che rappresenti il riferimento di lavorazione:
4.Selezioni il menu Programma e poi Aggiungi piano di riferimento.
5.Può rinominare gli elementi nella struttura premendo F2 o facendo clic con il pulsante destro del mouse e selezionando Rinomina.
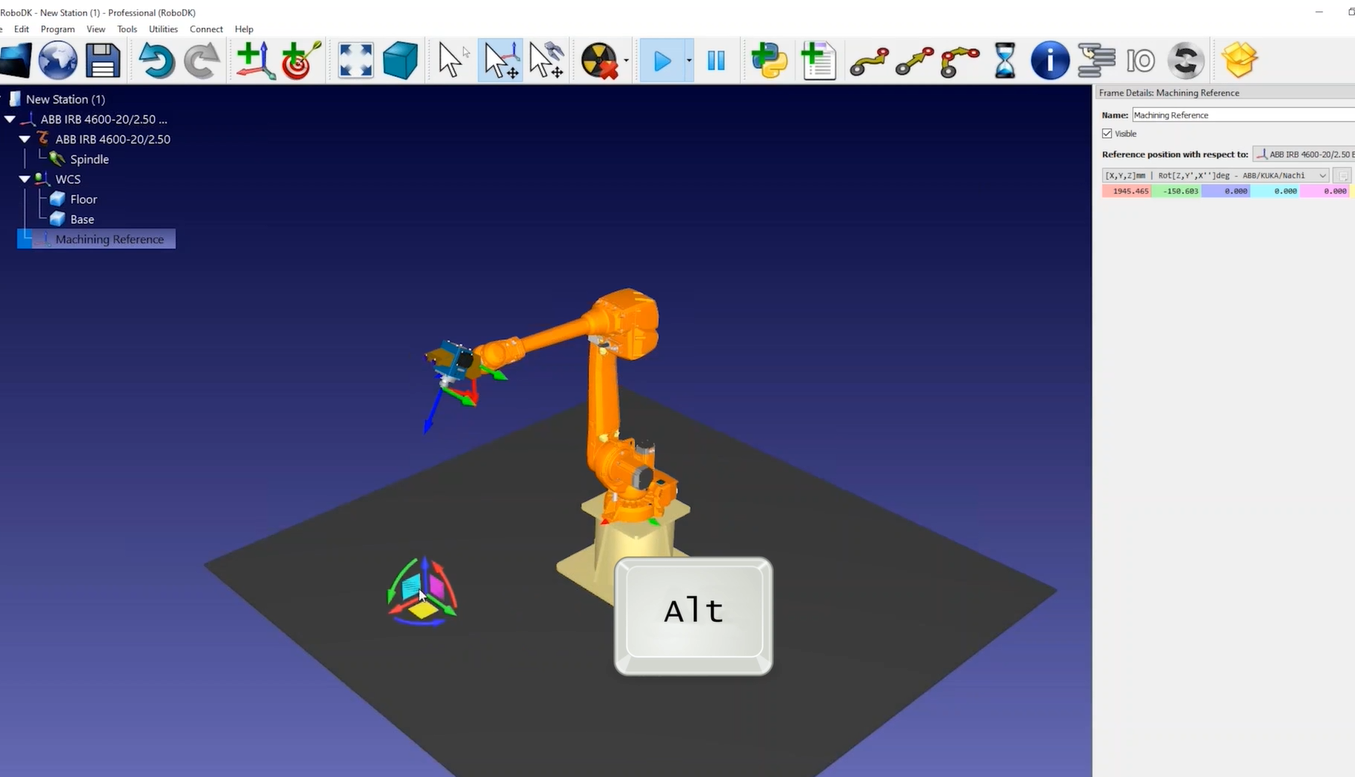
6.Tenendo premuto il tasto ALT, può spostare il sistema di coordinate dove desidera, se ha la possibilità di scegliere dove posizionare la parte
7.Può fare doppio clic sul robot per vedere quale utensile e sistema di coordinate sta utilizzando. Per una determinata posizione del robot, i valori che vede nel pannello del robot dovrebbero corrispondere agli stessi valori che vede nel controller del robot.
Segua questi passaggi per salvare la sua cella robotica:
8.Una volta costruita la sua cella robotica, può salvarla come un unico file RDK selezionando File➔ Salva stazione. Questo salverà tutte le impostazioni, compresi i modelli 3D, in un unico file.
9.Carichi il file del lavoro di lavorazione in RoboDK e RoboDK creerà automaticamente un progetto di lavorazione del robot per ogni operazione di lavorazione.
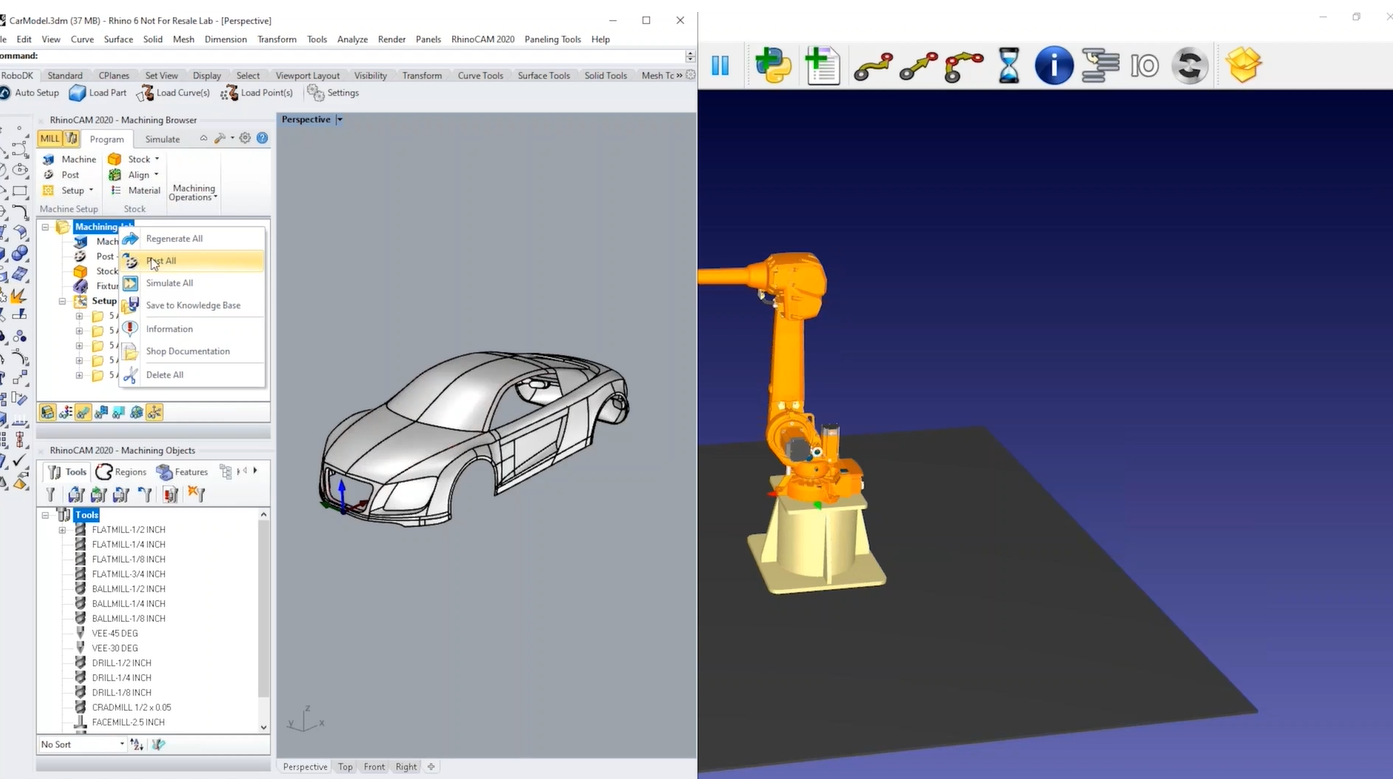
10.Può selezionare Aggiornamento per vedere se RoboDK riesce a trovare un percorso fattibile utilizzando le impostazioni predefinite. Può anche aggiornare tutte le operazioni in blocco.
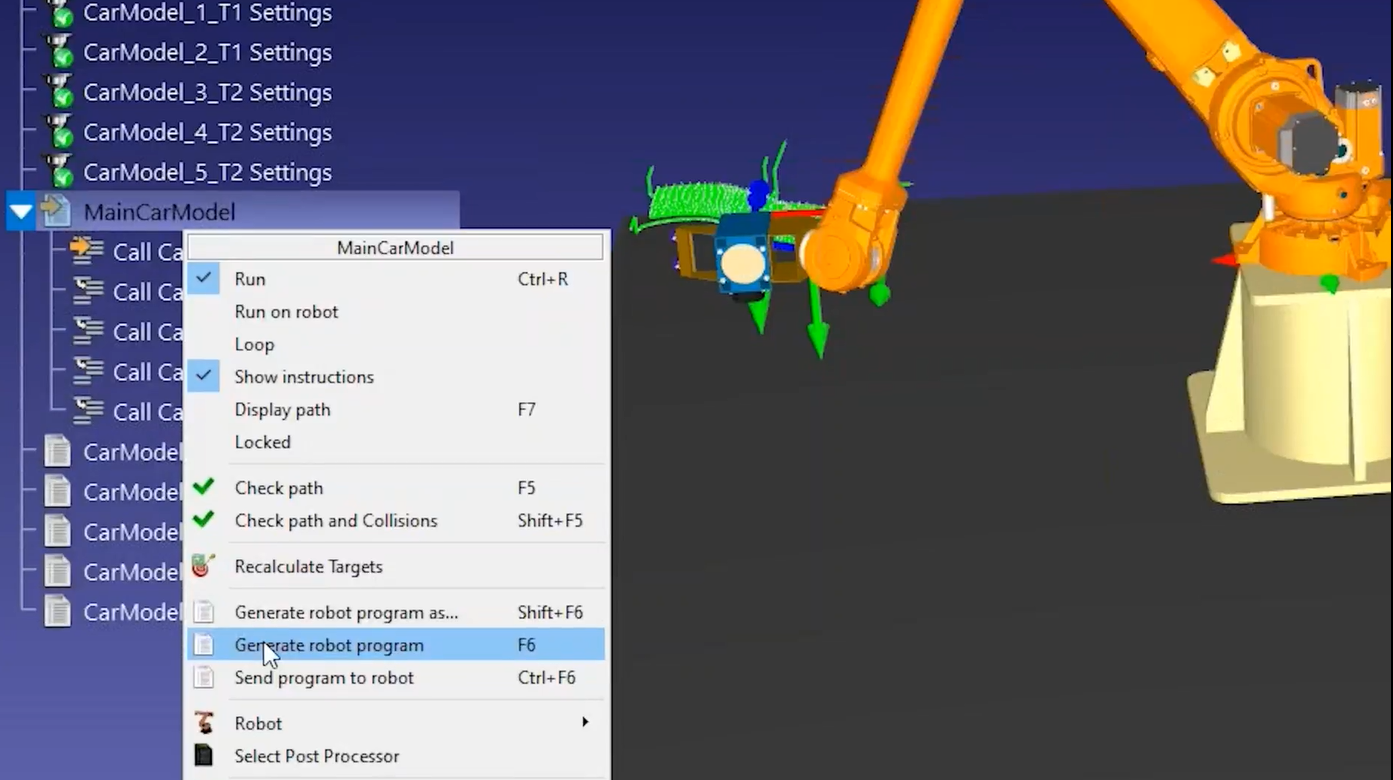
11.Una volta che ha una simulazione valida in RoboDK, può fare clic con il pulsante destro del mouse sul suo programma e selezionare Genera programma. Questo genererà i file richiesti dal controller del robot.