Personalizzare l'orientamento dello strumento
Può facilmente personalizzare l'orientamento dell'utensile nel programma di lavorazione del robot, insegnando l'orientamento preferito.
In questo esempio, potremmo migliorare l'orientamento dell'utensile per le ultime due lavorazioni:
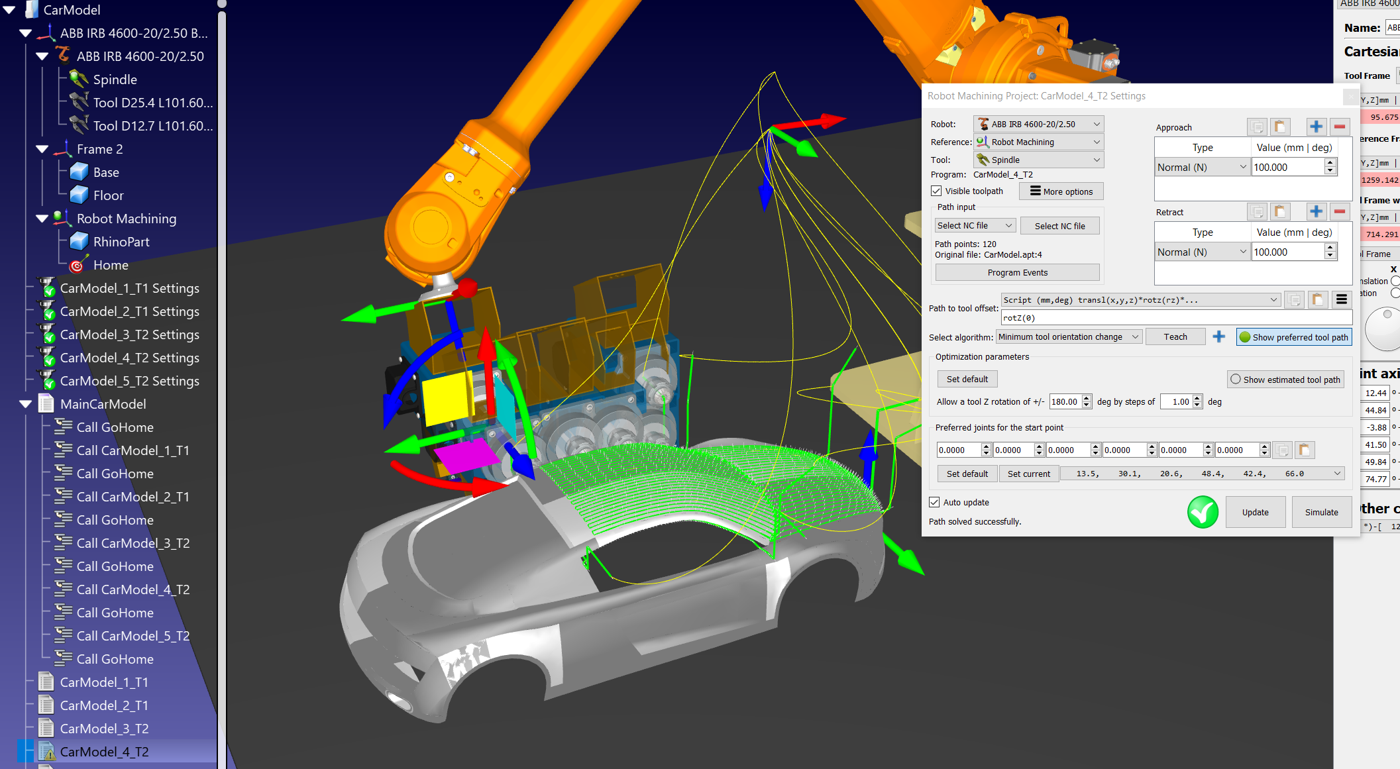
1.Clicchi due volte sulla lavorazione 4th per aprire le impostazioni di lavorazione del robot per quella lavorazione.
2.Selezioni Simulazione o esegua il programma corrispondente e fermi il robot in un punto del percorso di lavorazione.
3.Selezioni il pulsante Mostra percorso utensile preferito per vedere l'orientamento dell'utensile che RoboDK cercherà di far seguire al robot.
4.Tenga premuto il tasto Alt per afferrare l'utensile del robot e afferri la freccia rotonda blu che ruota intorno all'asse Z dell'utensile. Sposti l'orientamento dell'utensile su un orientamento che desidera seguire.
5.Selezioni Insegna nel menu di lavorazione del robot per tenere conto di questo orientamento lungo il percorso. Selezionando Insegna, sta dicendo a RoboDK che vuole seguire l'orientamento attuale dell'utensile, per cui le impostazioni si regoleranno in base a tale orientamento.
6.Selezioni Aggiorna per ricalcolare il percorso.
Selezionare Simula per eseguire la simulazione (o fare doppio clic sul programma generato).
7.Se il risultato è quello atteso, può copiare le impostazioni e incollarle in un altro percorso utensile: Clicchi con il tasto destro del mouse sulle impostazioni di lavorazione del robot e selezioni Copia impostazioni. Poi, faccia clic con il pulsante destro del mouse sulle nuove impostazioni di lavorazione del robot e selezioni Incolla impostazioni. Clicchi nuovamente con il tasto destro del mouse su quest'ultimo progetto di lavorazione robot e selezioni Aggiorna programma per aggiornare il programma associato a questo lavoro di lavorazione robot.