Transizioni sicure tra lavori di lavorazione con robot
Per rendere più sicura la transizione tra i lavori di lavorazione con il robot, può fare in modo che il robot si sposti in una posizione di avvicinamento dopo ogni operazione di lavorazione.
Segua questi passaggi per creare un nuovo programma chiamato GoHome e spostarsi in questa posizione al termine di un lavoro di lavorazione:
1.Creare un nuovo programma selezionando Programma➔ Add-in o selezionare il pulsante corrispondente nella barra degli strumenti.
2.Rinomini il programma premendo F2 in qualcosa come GoHome.
3.Selezioni il programma che ha appena creato.
4.Sposti il robot in una posizione sicura e selezioni il programma➔ Istruzione Spostamento giunti o selezioni il pulsante corrispondente nella barra degli strumenti. Questa operazione dovrebbe creare un nuovo bersaglio in quella posizione e aggiungere un'istruzione di spostamento dei giunti a quel bersaglio, se il programma è stato selezionato in precedenza.
5.Può quindi fare in modo che il robot si sposti verso questo bersaglio iniziale tra ogni operazione di lavorazione, facendo clic con il pulsante destro del mouse sulla prima istruzione di chiamata al programma e selezionando Aggiungi istruzione➔ Istruzione di chiamata al programma.
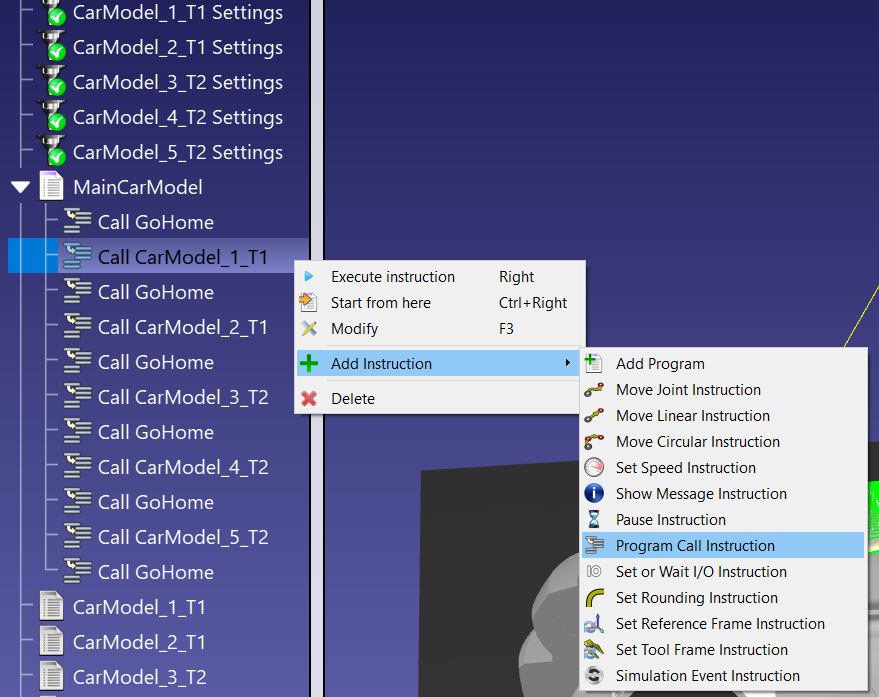
6.Inserisca il nome del programma a cui andare (GoHome) e selezioni OK.
7.Può quindi copiare/incollare questa istruzione all'interno del suo programma per ottenere rapidamente il risultato finale.
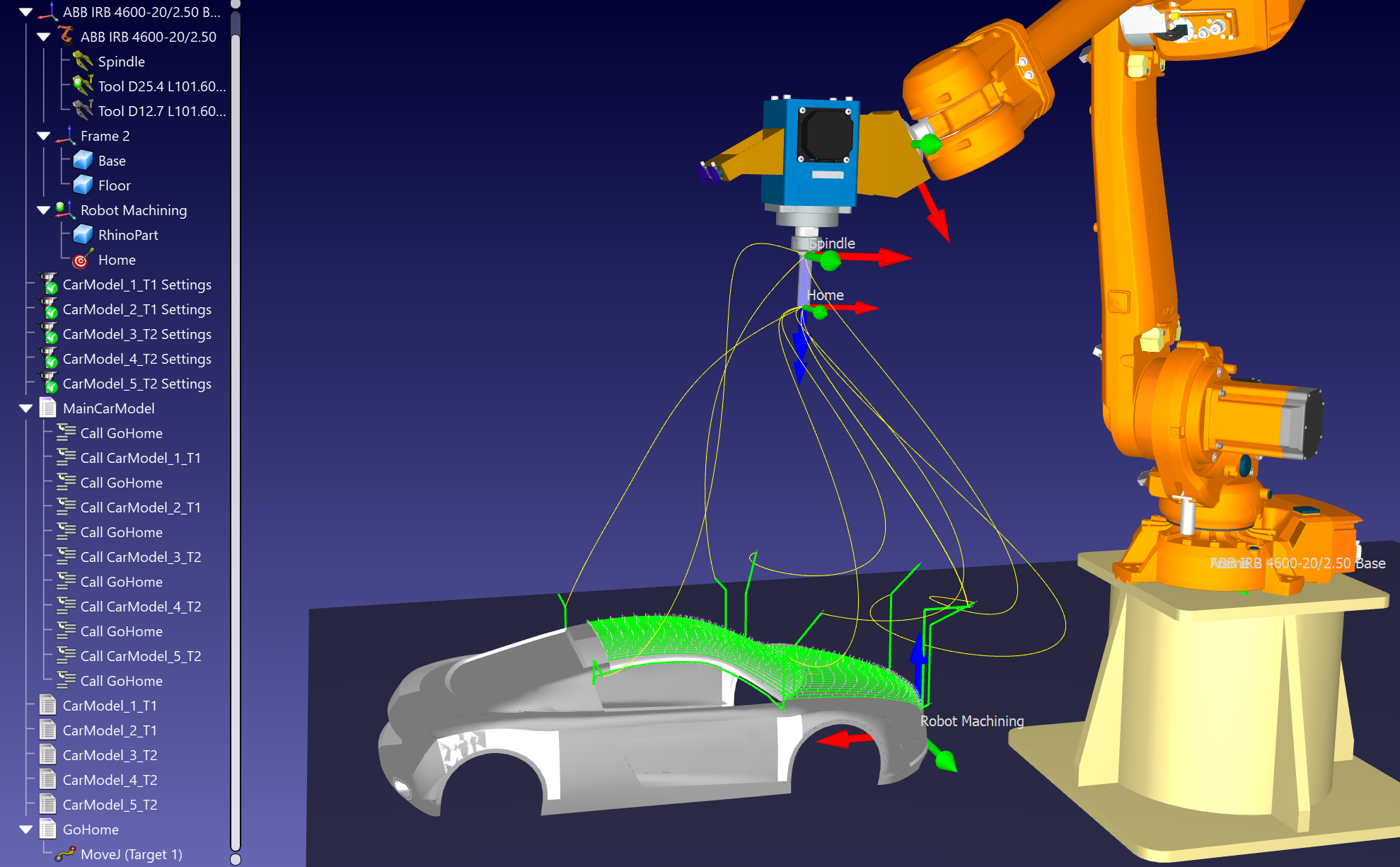
8.Clicchi con il tasto destro del mouse sul programma principale e selezioni Visualizza percorso per vedere il percorso del robot come una linea gialla. Questo la aiuterà a visualizzare se la posizione del suo bersaglio di avvicinamento è adatta al suo progetto.