Robot Machining (5x)
Introduzione
Questo esempio la aiuterà a capire come configurare le impostazioni di lavorazione del robot in RoboDK e come convertire un lavoro di lavorazione del robot a 5 assi in una simulazione di lavorazione del robot e in un programma del robot.
Una volta definita la strategia di lavorazione con il suo software CAM, può esportare il programma di lavorazione come Gcode o come file APT, in modo da poterlo caricare in RoboDK per creare un progetto di lavorazione del robot. In questo esempio, utilizzeremo un file APT per creare un progetto di fresatura robotizzata.
Può trovare questo progetto campione di RoboDK nella seguente posizione: C:/RoboDK/Other/Plugin-MecSoft/Car-Model.rdk.
Può trovare il progetto RDK campione nella cartella C:/RoboDK/Other/Plugin-MecSoft/Car-Model.rdk.
Esempio di fresatura robotizzata (5 assi)
In questo esempio stiamo esportando un programma generico di lavorazione a 5 assi da RhinoCAM. Può inviare tutte le lavorazioni come un unico file e aprirle in RoboDK.
In questo esempio, imparerà come convertire un lavoro di lavorazione in una simulazione di fresatura robotizzata e in un programma robot. Più precisamente, imparerà a generare programmi robotici validi per il suo controllore robot da file NC come un codice G o un file APT.
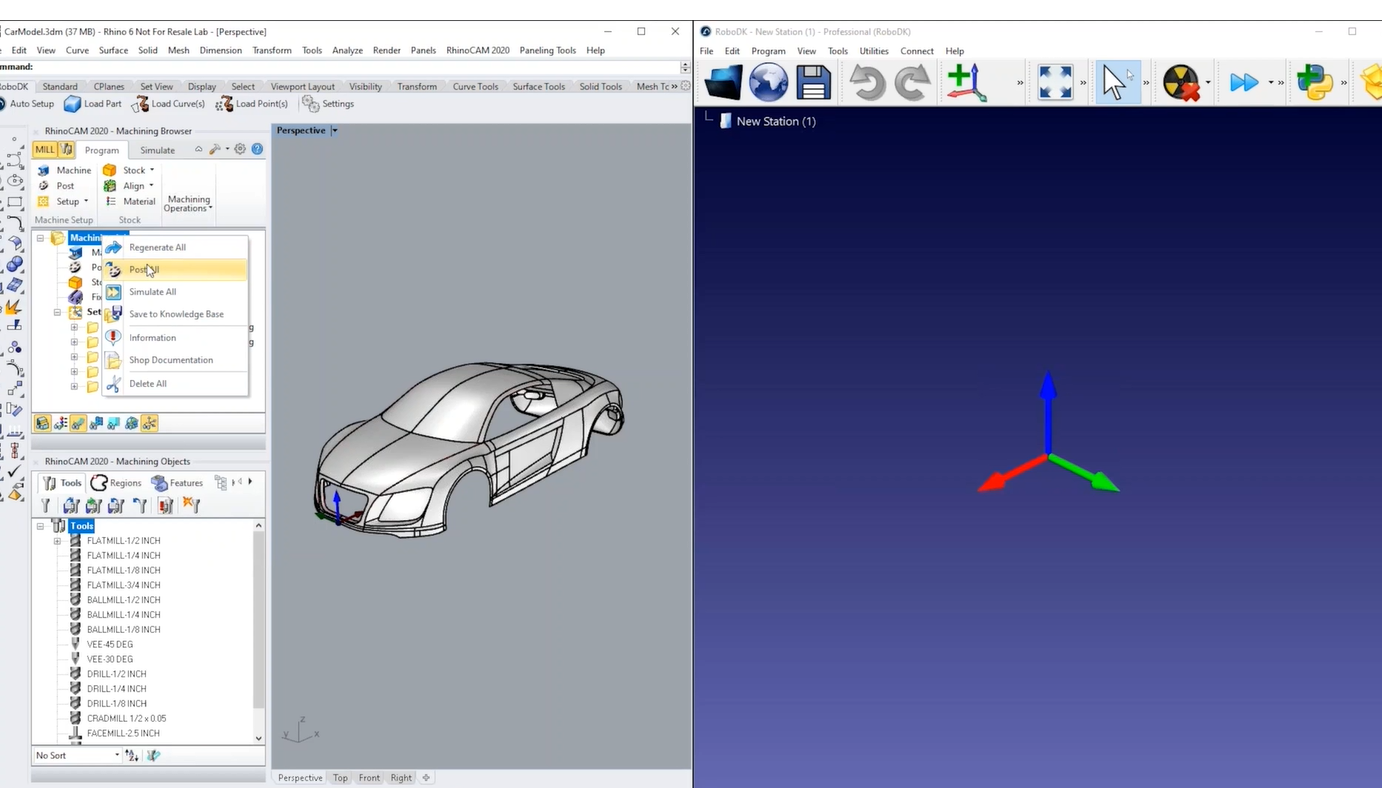
Programma di lavorazione in RhinoCAM
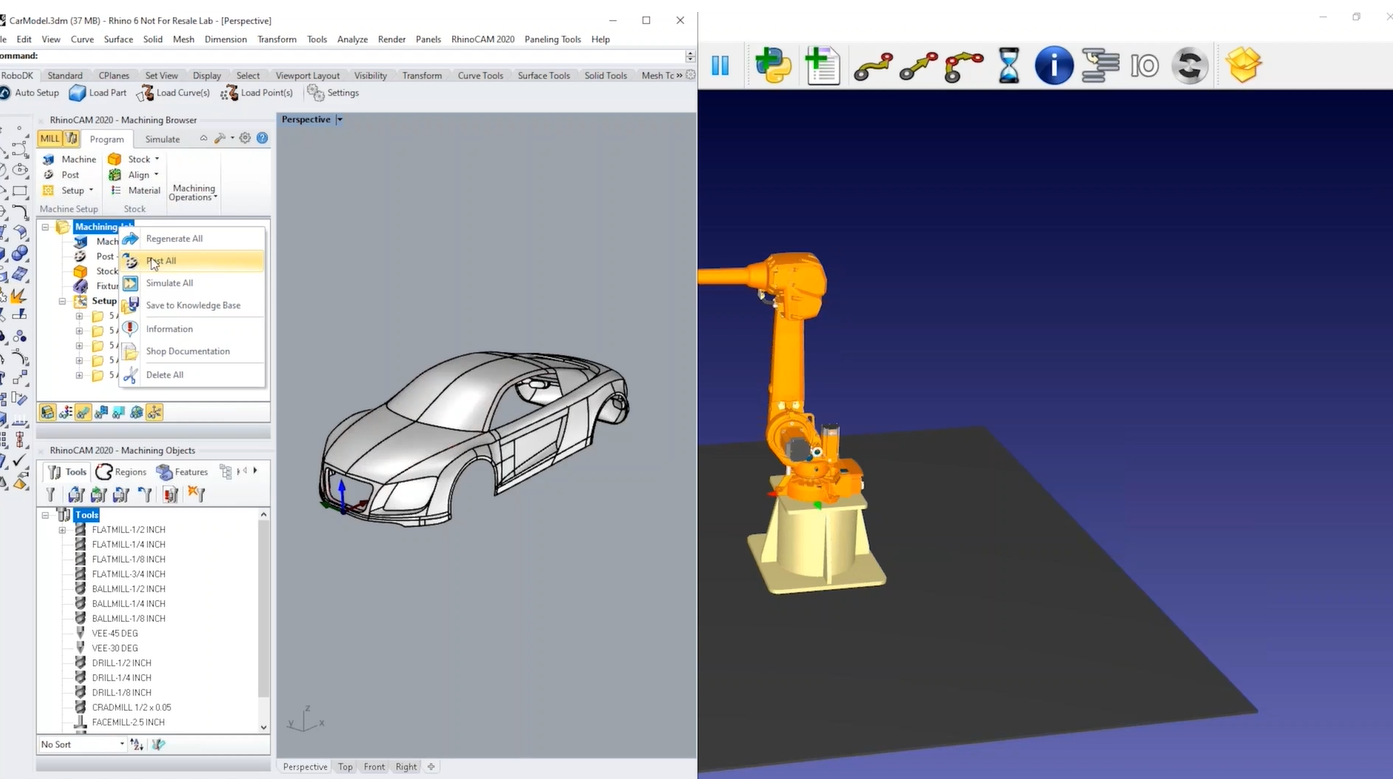
Questa sezione mostra come esportare un programma di lavorazione dal software Mecsoft RhinoCAM a RoboDK. Un file APT viene utilizzato per caricare il percorso utensile in RoboDK e inviato automaticamente tramite un file BAT personalizzato.
Segua questi passaggi in RhinoCAM per esportare il programma di lavorazione in RoboDK:
1.Clicchi con il tasto destro del mouse sul suo progetto da RhinoCAM.
2.Selezioni Post All per generare i programmi di lavorazione e caricare automaticamente tutto in RoboDK.
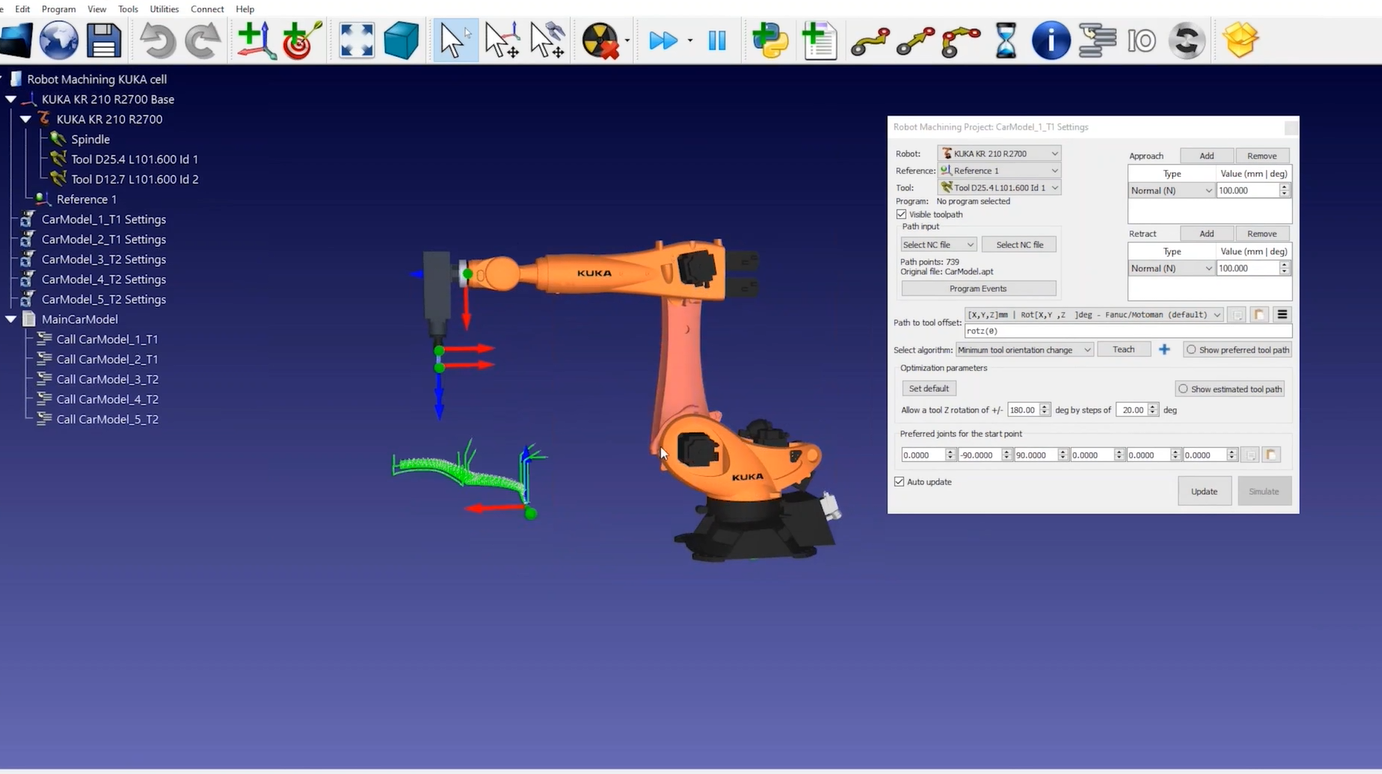
Progetto di lavorazione robot (5x)
Questa sezione mostra come può personalizzare l'impostazione del robot e il percorso di lavorazione per realizzare con successo la fresatura robotizzata. Un progetto di lavorazione in RoboDK le consente di convertire qualsiasi operazione generica di produzione a 5 assi in una simulazione di robot e in un programma di robot.
Si può notare che ogni operazione di lavorazione viene automaticamente suddivisa in RoboDK come progetto di lavorazione del robot. Si può anche notare che una cella KUKA è stata caricata di default con il programma di lavorazione. Questo accade perché abbiamo inviato il file da RhinoCAM utilizzando un file bat personalizzato.
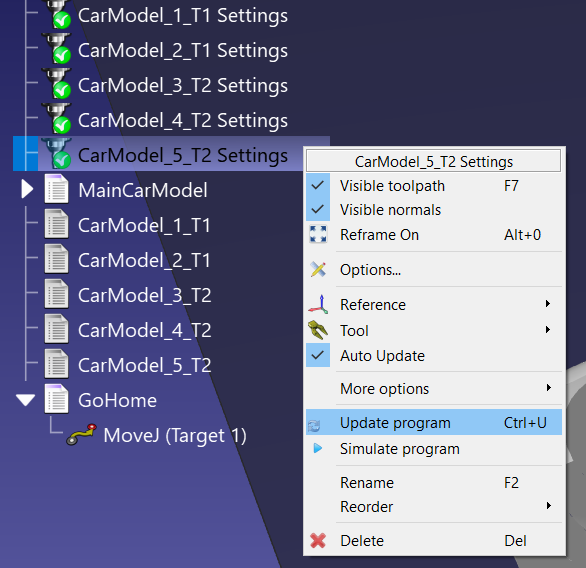
1.Può selezionare Aggiorna su ogni progetto di lavorazione del robot, oppure selezionare in blocco i percorsi utensile di lavorazione del robot e scegliere Aggiorna programmi per generare i programmi robot corrispondenti nell'ambiente RoboDK.
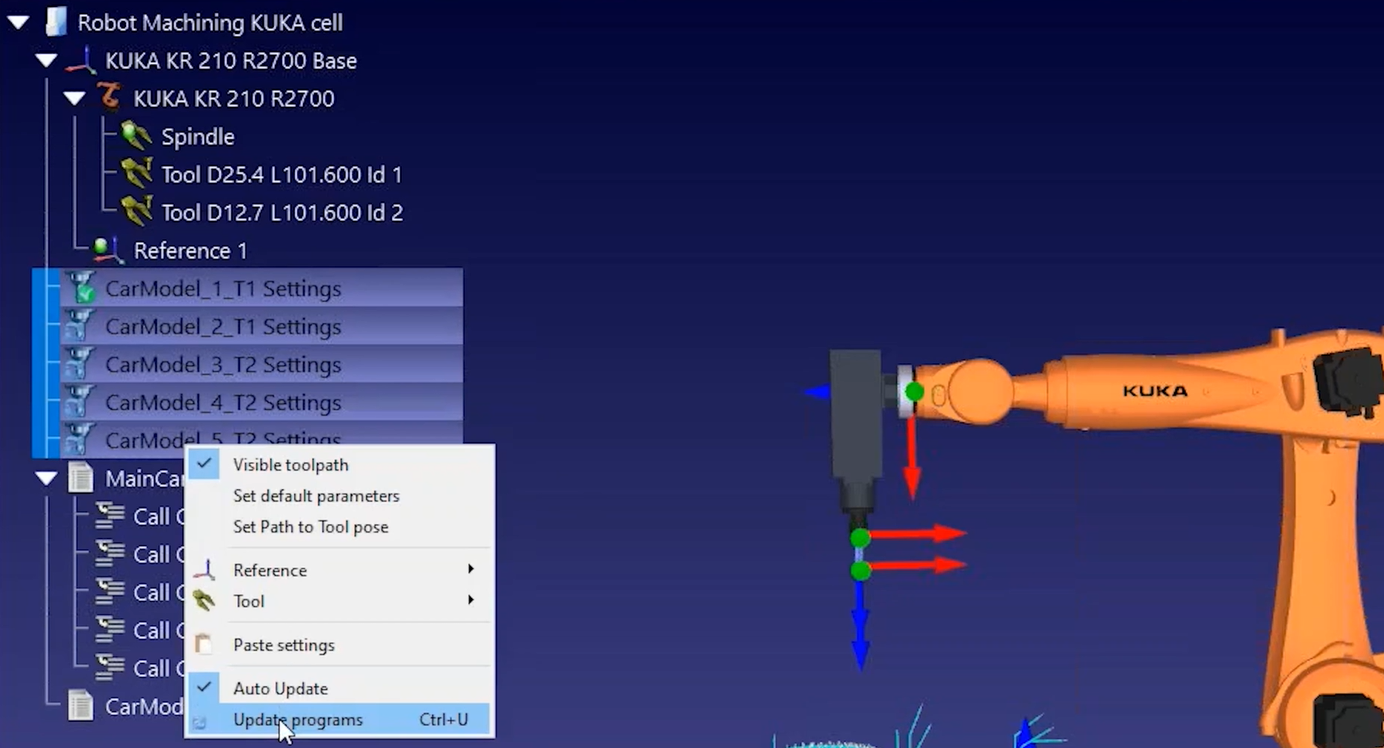
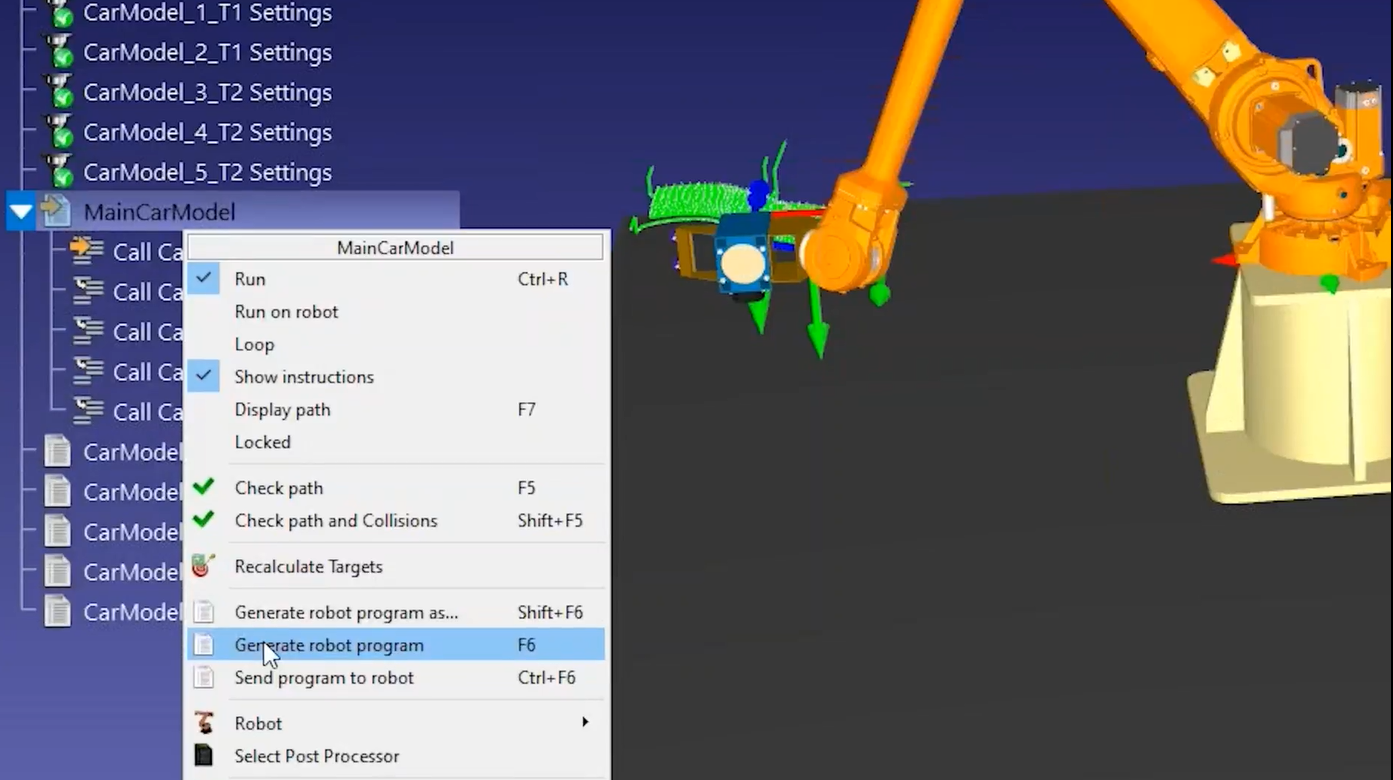
2.Può generare direttamente i programmi del robot selezionando in blocco i suoi programmi e selezionando Genera programma robot.
Selezioni il suo robot
Questa sezione illustra come può creare una nuova cella
Può seguire questi passaggi per costruire una nuova cella robotica per la fresatura robotizzata.
1.Selezioni File➔ Nuova stazione.
2.Può accedere alla biblioteca selezionando File➔ Apri la biblioteca online.
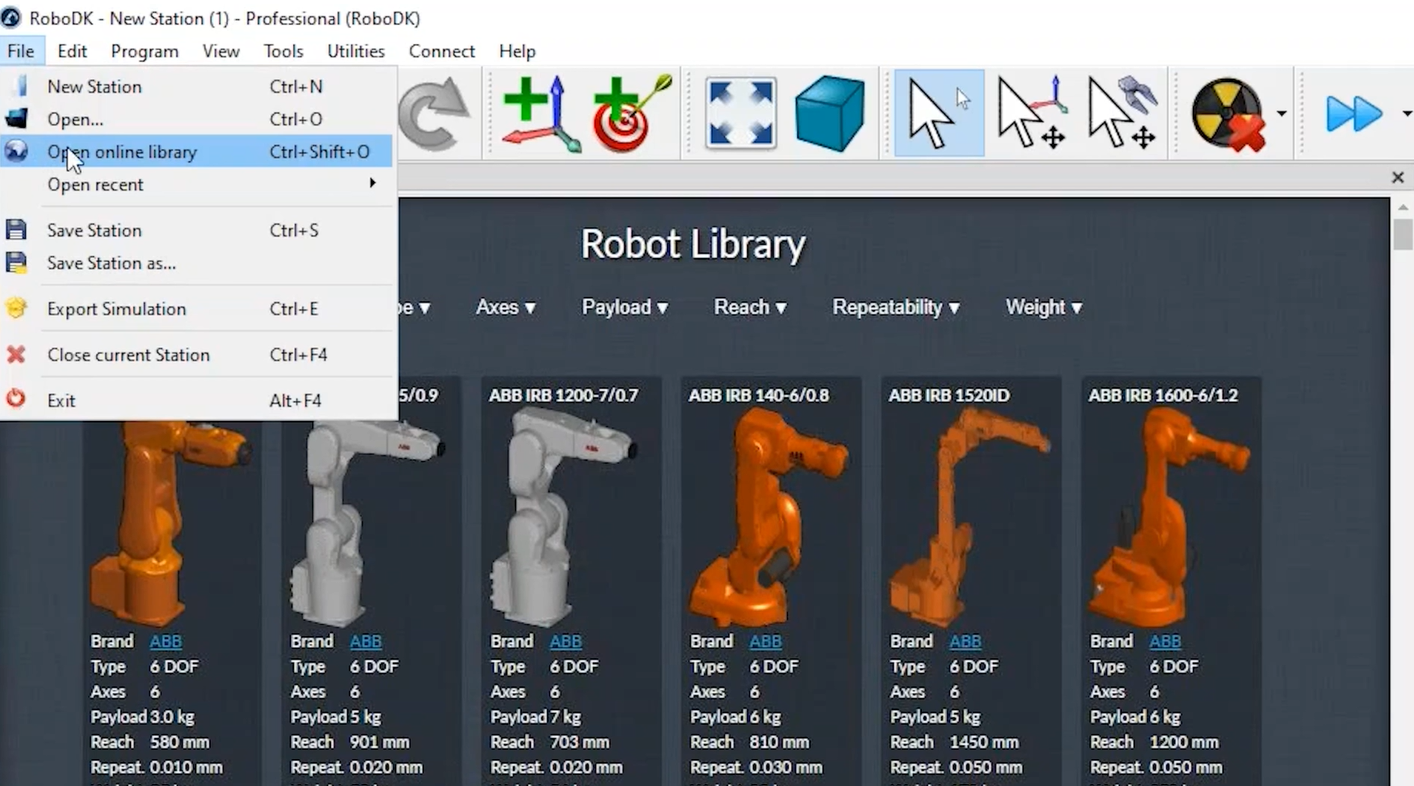
3.Una volta trovato il robot, selezioni Download per aprire il robot nel suo progetto.
Crea il sistema di coordinate di lavorazione del robot
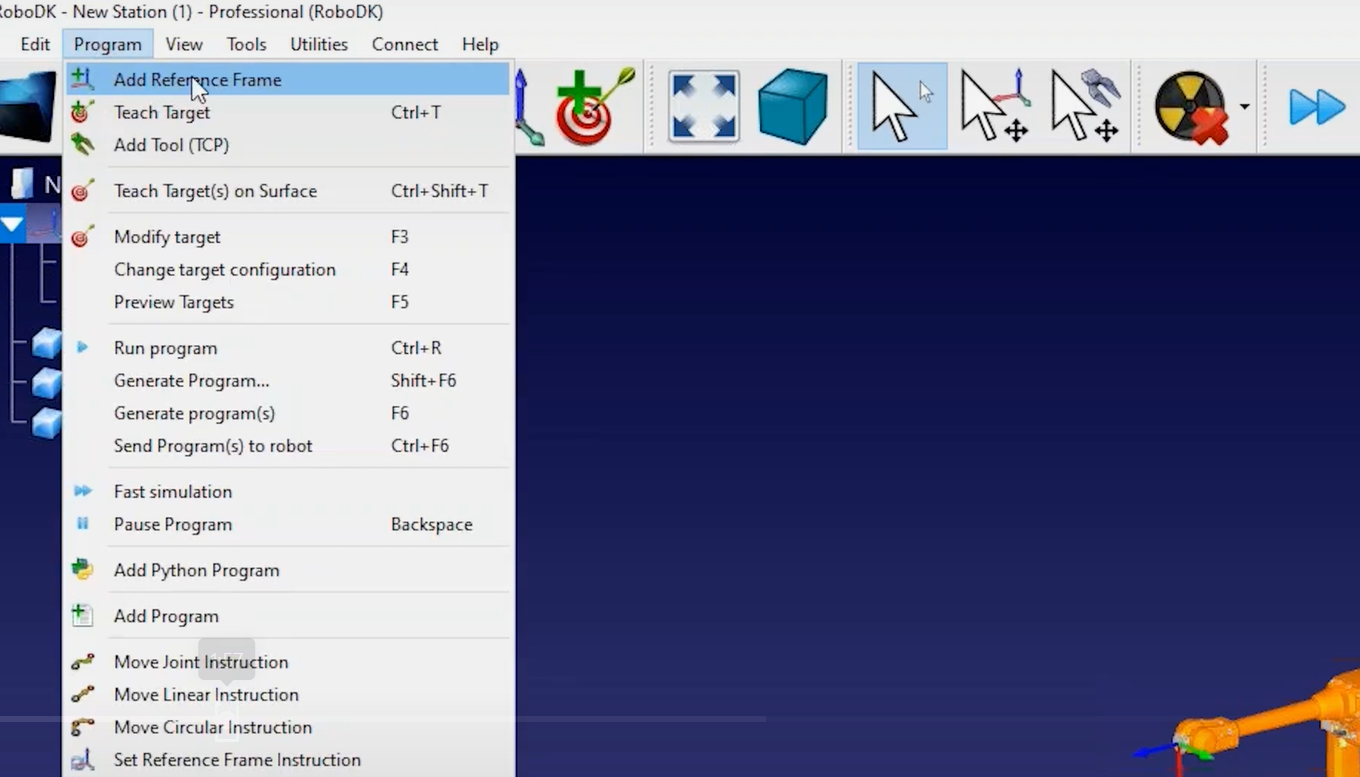
Può creare un nuovo sistema di coordinate per la sua attrezzatura di fresatura robotizzata selezionando il menu Programma e poi Aggiungi piano di riferimento.
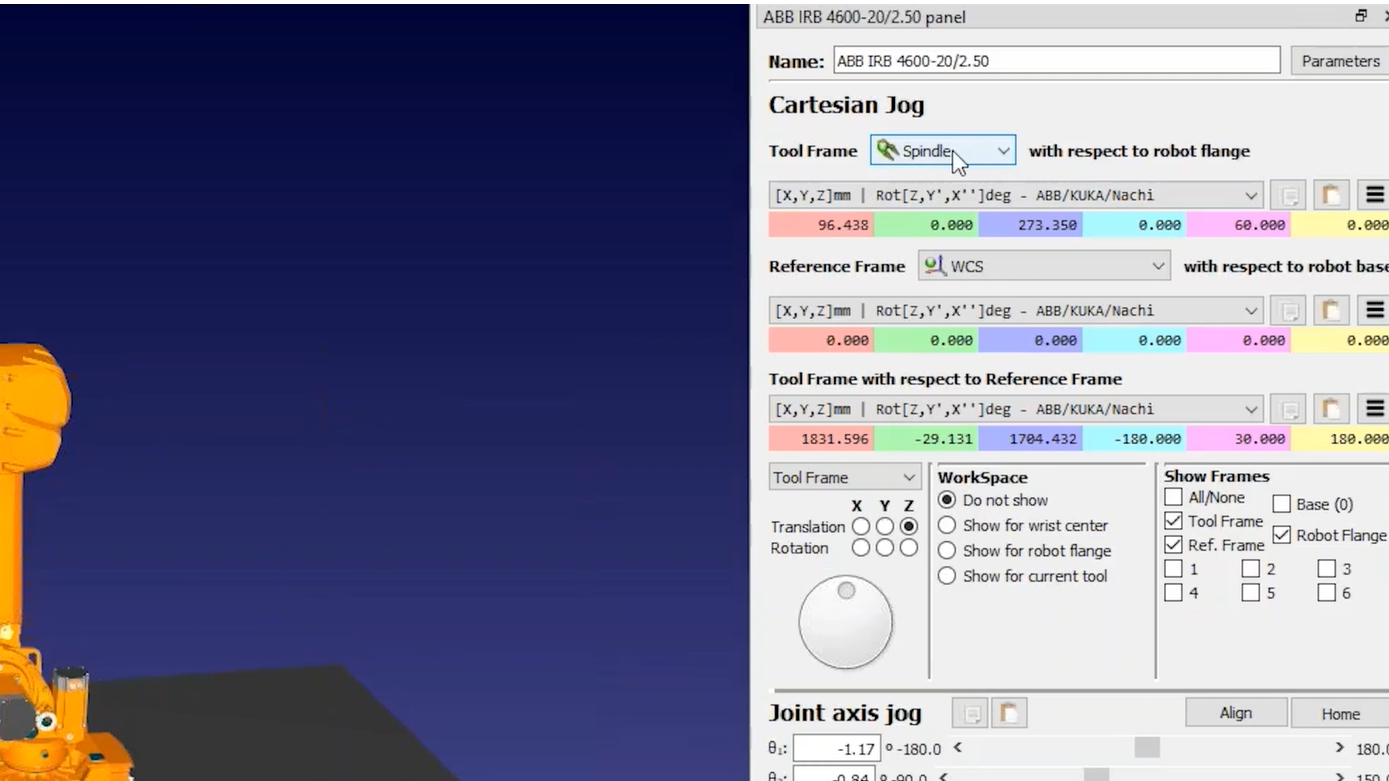
Segua questi passaggi per definire correttamente lo strumento (TCP):
1.Può inserire le coordinate dell'utensile, se ne dispone (può scegliere tra diversi formati di orientamento specifici del fornitore per inserire la posa dell'utensile).
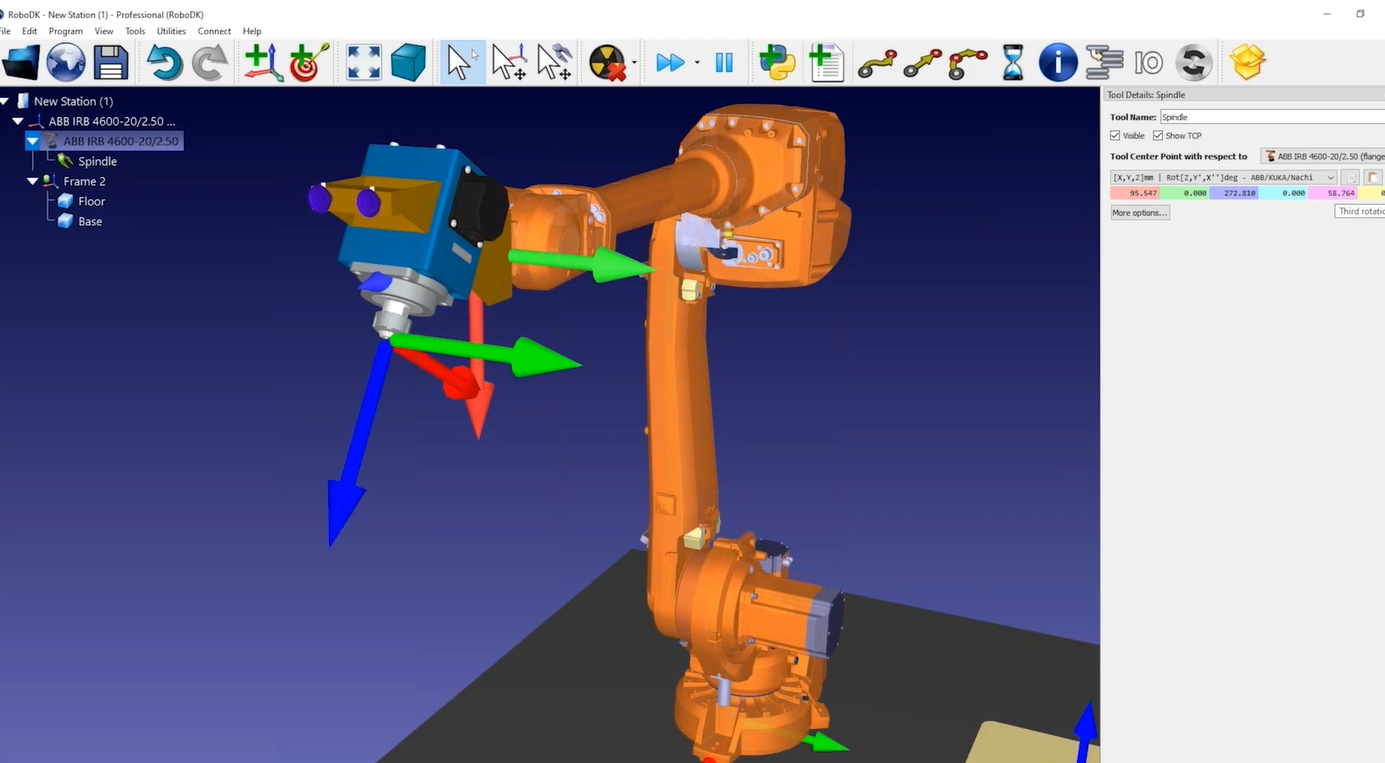
2.Tenendo premuto il tasto ALT, può spostare il robot o qualsiasi sistema di coordinate.
3.Tenendo premuti i tasti ALT e Shift, può modificare la posizione e l'orientamento del suo TCP.
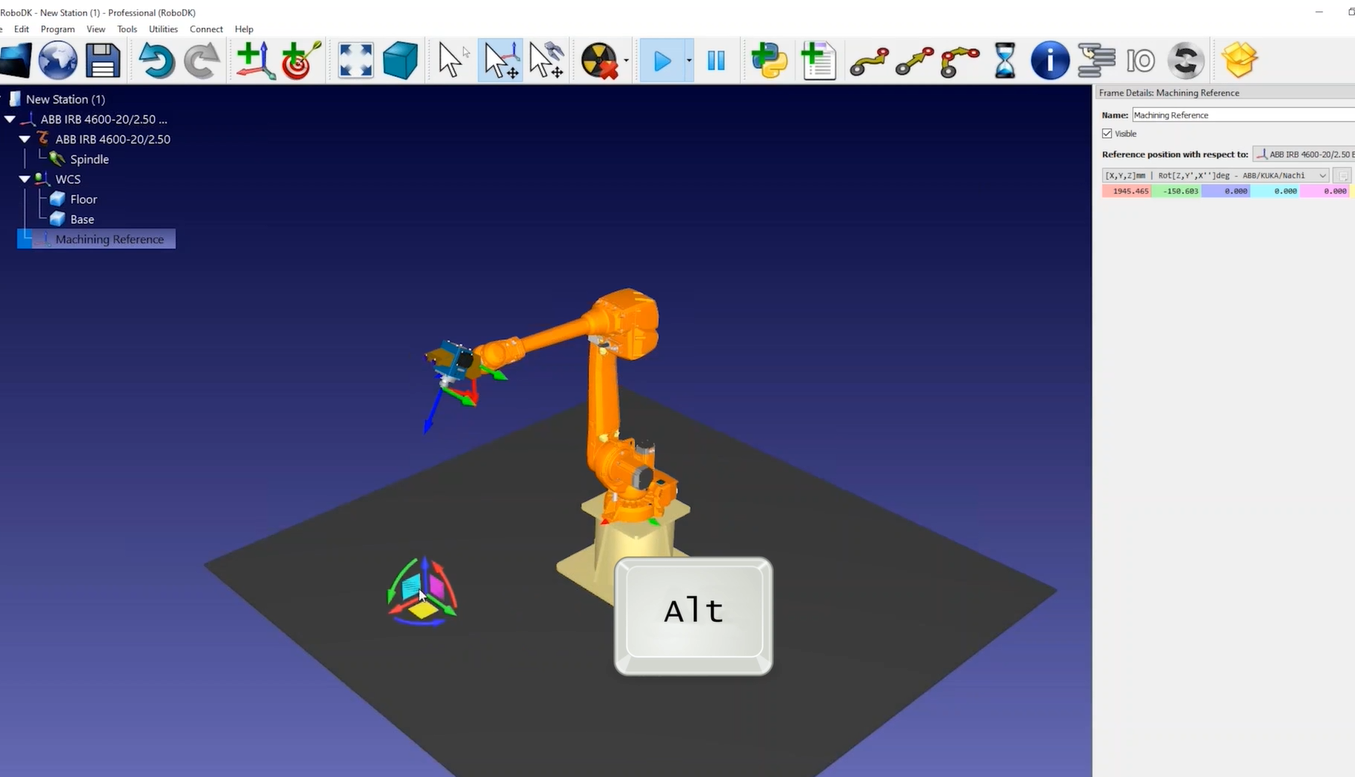
Segua questi passaggi per aggiungere un altro sistema di coordinate che rappresenti il riferimento di lavorazione:
4.Selezioni il menu Programma e poi Aggiungi piano di riferimento.
5.Può rinominare gli elementi nella struttura premendo F2 o facendo clic con il pulsante destro del mouse e selezionando Rinomina.
6.Tenendo premuto il tasto ALT, può spostare il sistema di coordinate dove desidera, se ha la possibilità di scegliere dove posizionare la parte
7.Può fare doppio clic sul robot per vedere quale utensile e sistema di coordinate sta utilizzando. Per una determinata posizione del robot, i valori che vede nel pannello del robot dovrebbero corrispondere agli stessi valori che vede nel controller del robot.
Segua questi passaggi per salvare la sua cella robotica:
8.Una volta costruita la sua cella robotica, può salvarla come un unico file RDK selezionando File➔ Salva stazione. Questo salverà tutte le impostazioni, compresi i modelli 3D, in un unico file.
9.Carichi il file del lavoro di lavorazione in RoboDK e RoboDK creerà automaticamente un progetto di lavorazione del robot per ogni operazione di lavorazione.
10.Può selezionare Aggiornamento per vedere se RoboDK riesce a trovare un percorso fattibile utilizzando le impostazioni predefinite. Può anche aggiornare tutte le operazioni in blocco.
11.Una volta che ha una simulazione valida in RoboDK, può fare clic con il pulsante destro del mouse sul suo programma e selezionare Genera programma. Questo genererà i file richiesti dal controller del robot.
Personalizzare l'orientamento dello strumento
Può facilmente personalizzare l'orientamento dell'utensile nel programma di lavorazione del robot, insegnando l'orientamento preferito.
In questo esempio, potremmo migliorare l'orientamento dell'utensile per le ultime due lavorazioni:
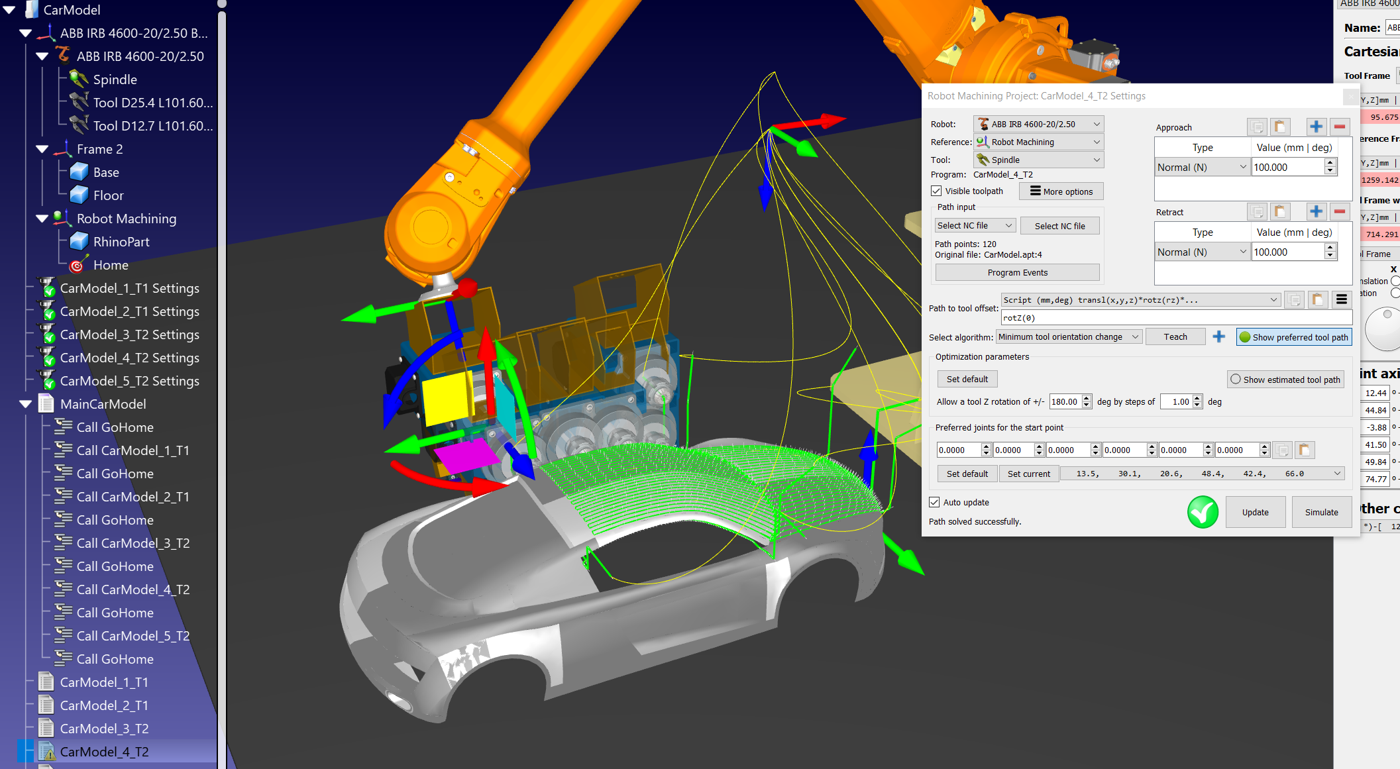
1.Clicchi due volte sulla lavorazione 4th per aprire le impostazioni di lavorazione del robot per quella lavorazione.
2.Selezioni Simulazione o esegua il programma corrispondente e fermi il robot in un punto del percorso di lavorazione.
3.Selezioni il pulsante Mostra percorso utensile preferito per vedere l'orientamento dell'utensile che RoboDK cercherà di far seguire al robot.
4.Tenga premuto il tasto Alt per afferrare l'utensile del robot e afferri la freccia rotonda blu che ruota intorno all'asse Z dell'utensile. Sposti l'orientamento dell'utensile su un orientamento che desidera seguire.
5.Selezioni Insegna nel menu di lavorazione del robot per tenere conto di questo orientamento lungo il percorso. Selezionando Insegna, sta dicendo a RoboDK che vuole seguire l'orientamento attuale dell'utensile, per cui le impostazioni si regoleranno in base a tale orientamento.
6.Selezioni Aggiorna per ricalcolare il percorso.
Selezionare Simula per eseguire la simulazione (o fare doppio clic sul programma generato).
7.Se il risultato è quello atteso, può copiare le impostazioni e incollarle in un altro percorso utensile: Clicchi con il tasto destro del mouse sulle impostazioni di lavorazione del robot e selezioni Copia impostazioni. Poi, faccia clic con il pulsante destro del mouse sulle nuove impostazioni di lavorazione del robot e selezioni Incolla impostazioni. Clicchi nuovamente con il tasto destro del mouse su quest'ultimo progetto di lavorazione robot e selezioni Aggiorna programma per aggiornare il programma associato a questo lavoro di lavorazione robot.
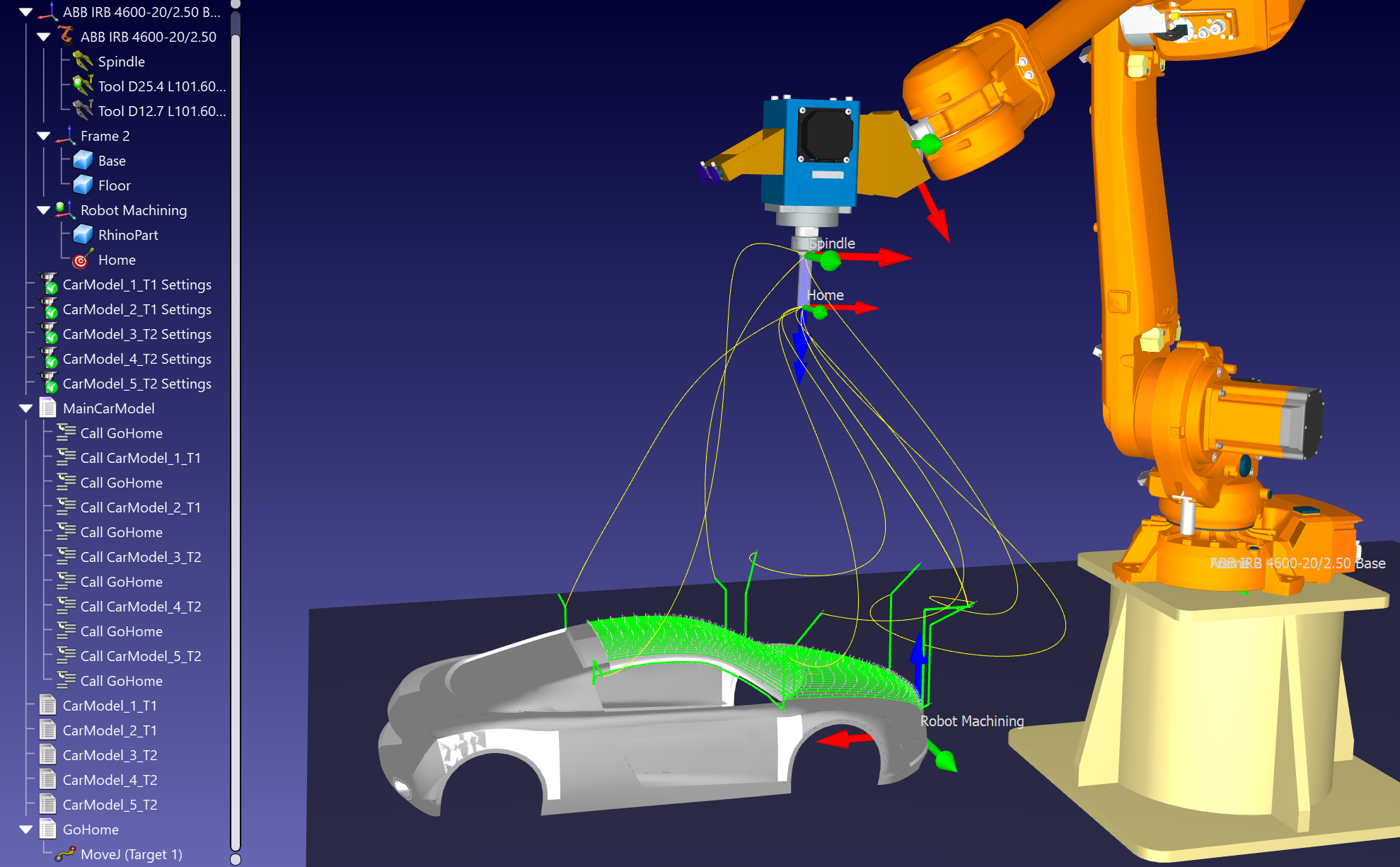
Transizioni sicure tra lavori di lavorazione con robot
Per rendere più sicura la transizione tra i lavori di lavorazione con il robot, può fare in modo che il robot si sposti in una posizione di avvicinamento dopo ogni operazione di lavorazione.
Segua questi passaggi per creare un nuovo programma chiamato GoHome e spostarsi in questa posizione al termine di un lavoro di lavorazione:
1.Creare un nuovo programma selezionando Programma➔ Add-in o selezionare il pulsante corrispondente nella barra degli strumenti.
2.Rinomini il programma premendo F2 in qualcosa come GoHome.
3.Selezioni il programma che ha appena creato.
4.Sposti il robot in una posizione sicura e selezioni il programma➔ Istruzione Spostamento giunti o selezioni il pulsante corrispondente nella barra degli strumenti. Questa operazione dovrebbe creare un nuovo bersaglio in quella posizione e aggiungere un'istruzione di spostamento dei giunti a quel bersaglio, se il programma è stato selezionato in precedenza.
5.Può quindi fare in modo che il robot si sposti verso questo bersaglio iniziale tra ogni operazione di lavorazione, facendo clic con il pulsante destro del mouse sulla prima istruzione di chiamata al programma e selezionando Aggiungi istruzione➔ Istruzione di chiamata al programma.
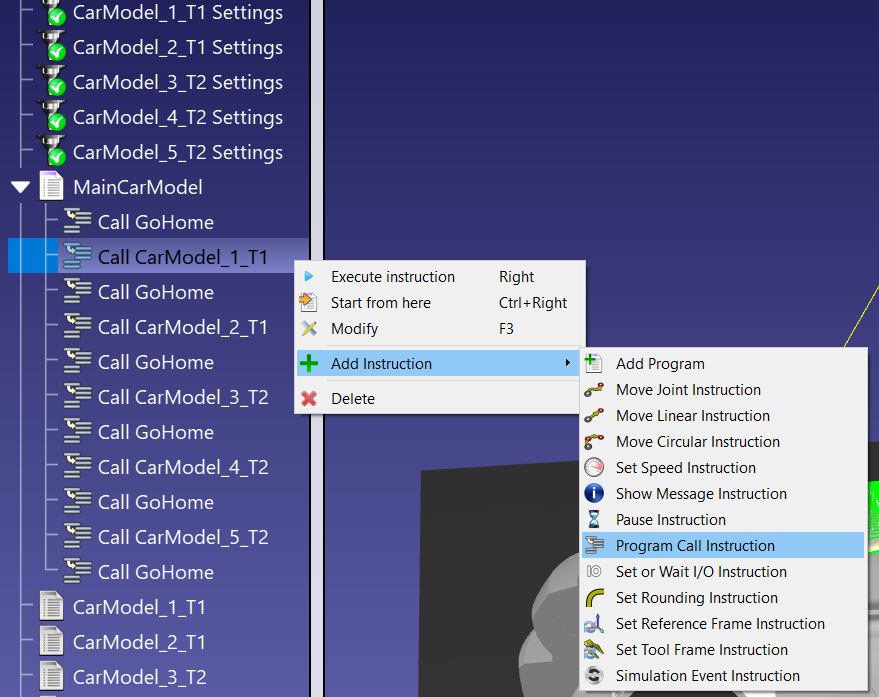
6.Inserisca il nome del programma a cui andare (GoHome) e selezioni OK.
7.Può quindi copiare/incollare questa istruzione all'interno del suo programma per ottenere rapidamente il risultato finale.
8.Clicchi con il tasto destro del mouse sul programma principale e selezioni Visualizza percorso per vedere il percorso del robot come una linea gialla. Questo la aiuterà a visualizzare se la posizione del suo bersaglio di avvicinamento è adatta al suo progetto.