Stazione RoboDK
Il passo successivo consiste nel verificare se l'ordine di esecuzione delle sezioni del percorso è corretto, selezionando
Se desidera riordinare o cambiare il senso di una sezione di percorso, segua questi passaggi:
1.Corregga l'ordine delle sezioni del percorso cliccando su
2.Clicchi con il tasto destro del mouse su una sezione vuota della stazione e ripristini la selezione
3.Si rechi al punto di partenza del suo percorso e selezioni la prima sezione. Si assicuri che sia orientato nella direzione giusta cliccando con il tasto destro del mouse e, se necessario, prema Cambia senso.
4.Selezioni Selezione automatica curva successiva o Selezione automatica tutto per selezionare automaticamente ogni sezione del percorso nell'ordine giusto.
5.Selezioni Fatto. Questo la riporterà alla finestra di impostazione di RoboDK.
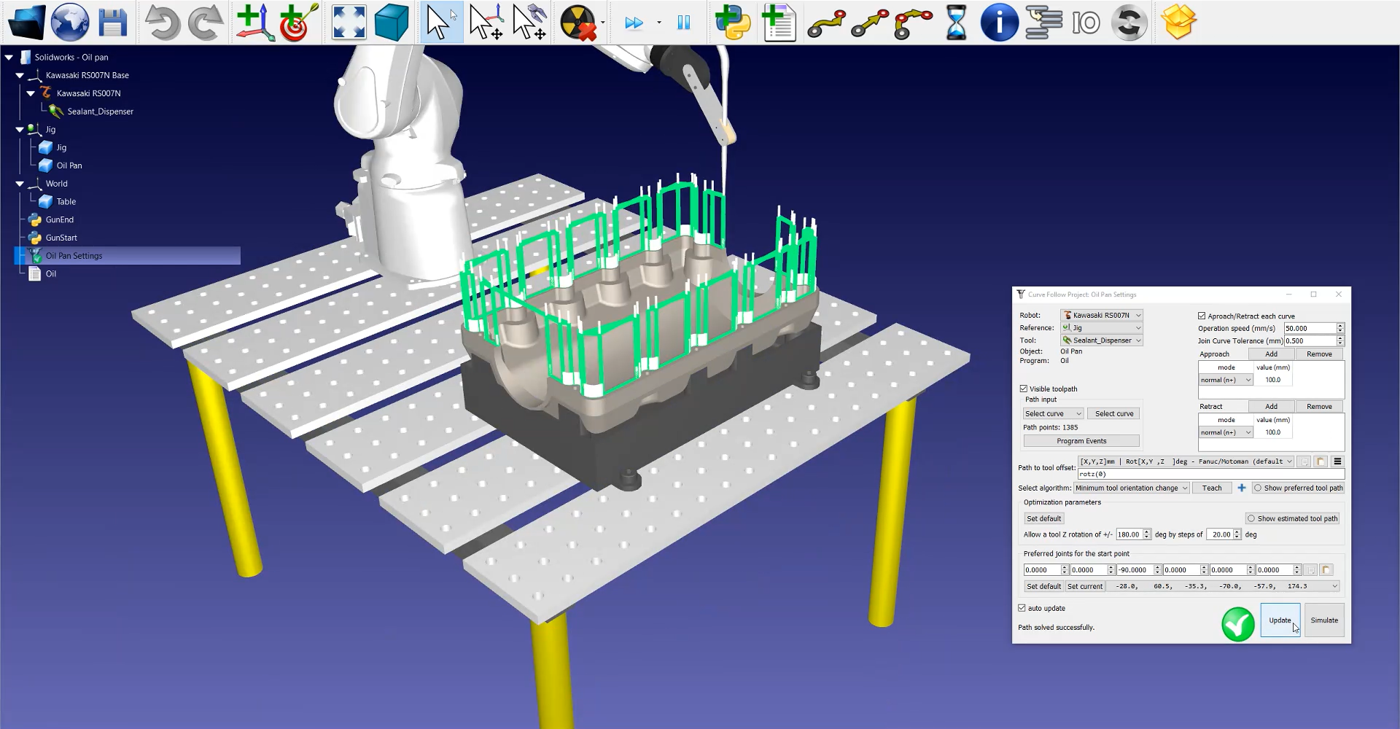
Poi dovrà regolare l'orientamento dello strumento:
1.Selezioni Mostra percorso utensile preferito per aiutare a visualizzare l'utensile lungo il percorso, come mostrato nell'immagine sottostante.
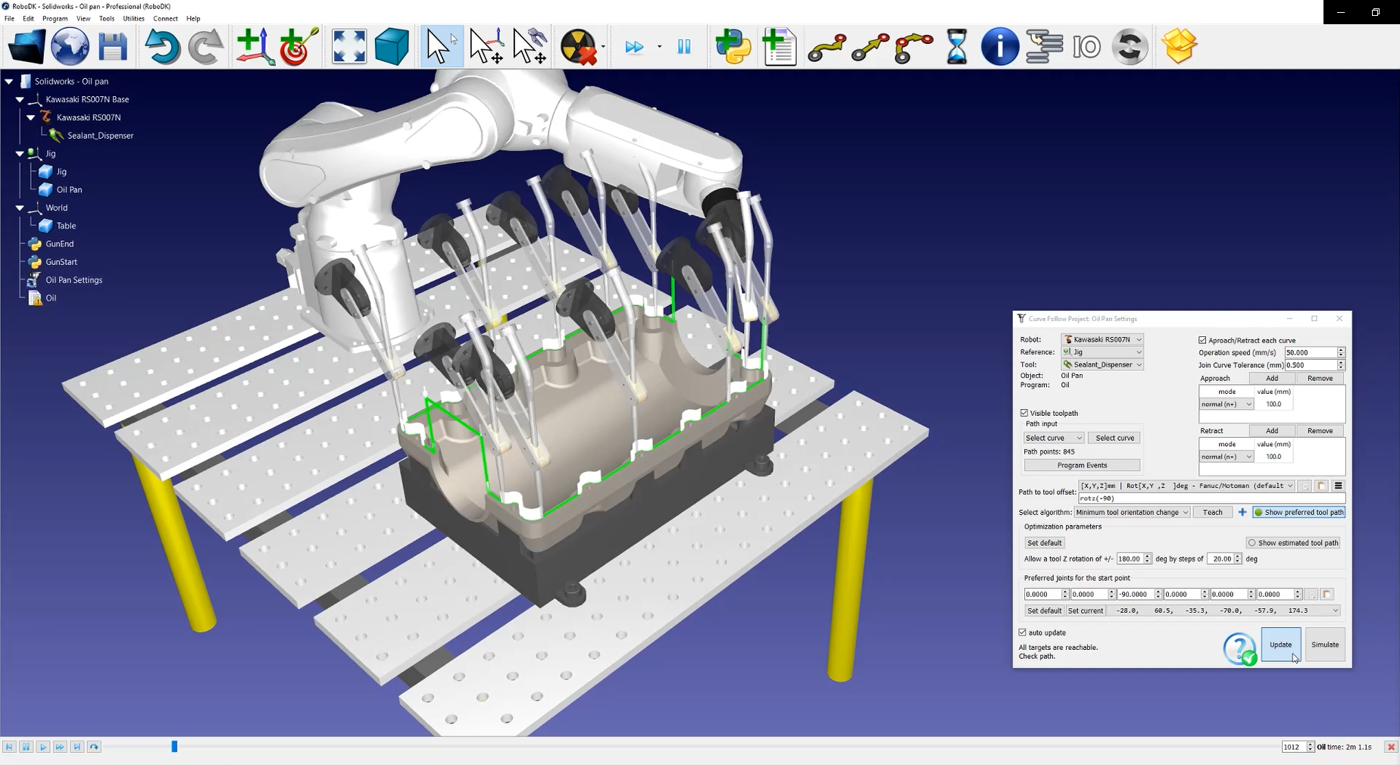
2.Modifichi il valore rotz. In questo esempio viene impostato -90 gradi.
3.Selezioni Aggiornamento➔ Simulazione.
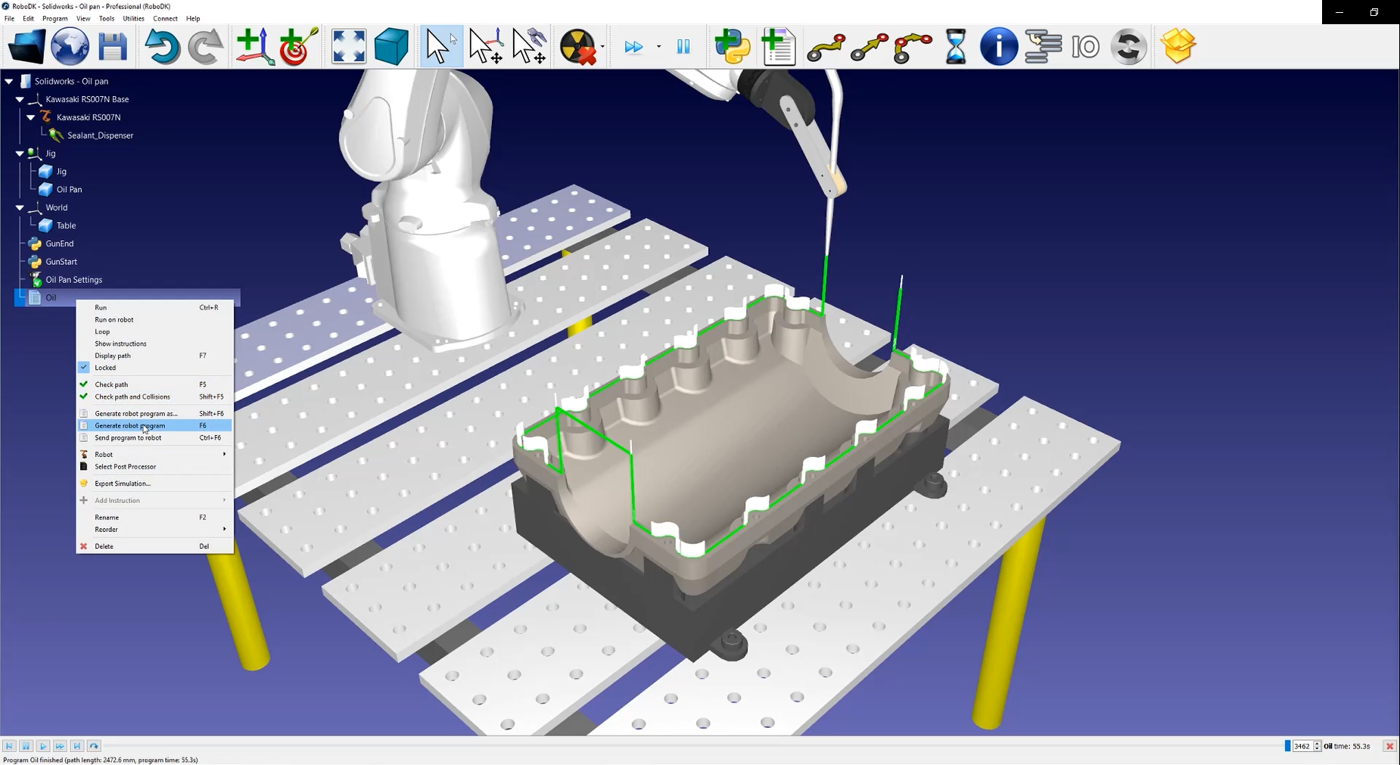
Per generare il programma del robot, clicchi con il tasto destro del mouse su
Il file .pg è ora pronto per essere trasferito al controller del robot.