Dispensing
Introduzione
Questa sezione la aiuterà a creare un progetto di base in RoboDK per la simulazione di robot e la programmazione offline. In questo esempio, un robot Kawasaki RS007N viene simulato e programmato per un'applicazione robotica di erogazione di liquidi, utilizzando SolidWorks e RoboDK. Imparerà a trasformare uno schizzo 2D da SolidWorks in un vero programma robotico in meno di 15 minuti.
Video: Programmazione di robot con SolidWorks per un'applicazione di dosaggio di liquidi
Con il plug-in RoboDK per SolidWorks può caricare facilmente i modelli 3D creati in SolidWorks in RoboDK. Questo plug-in consente di programmare oltre 50 diversi produttori di robot e 500 robot direttamente da SolidWorks.
Il plug-in RoboDK per SolidWorks funziona per SolidWorks 2016 e successivi ed è gratuito. Tuttavia, alcune opzioni di RoboDK richiedono l'acquisto di una licenza.
Esempio di erogazione di liquidi
Per avviare il progetto, dovrà innanzitutto selezionare l'esempio di erogazione di liquidi di RoboDK nella libreria predefinita.
Impostazione
Questo esempio utilizza il robot Kawasaki RS007N, uno strumento di erogazione, il pezzo, una coppa dell'olio e la dima per tenere il pezzo in posizione.
Carica la stazione:
1.Selezionare File ➔
2.Individui l'esempio di dispensazione di liquidi dalla sezione Esempi di RoboDK:
C:/RoboDK/Examples/Plugin-SolidWorks-Liquid-Dispensing.rdk.
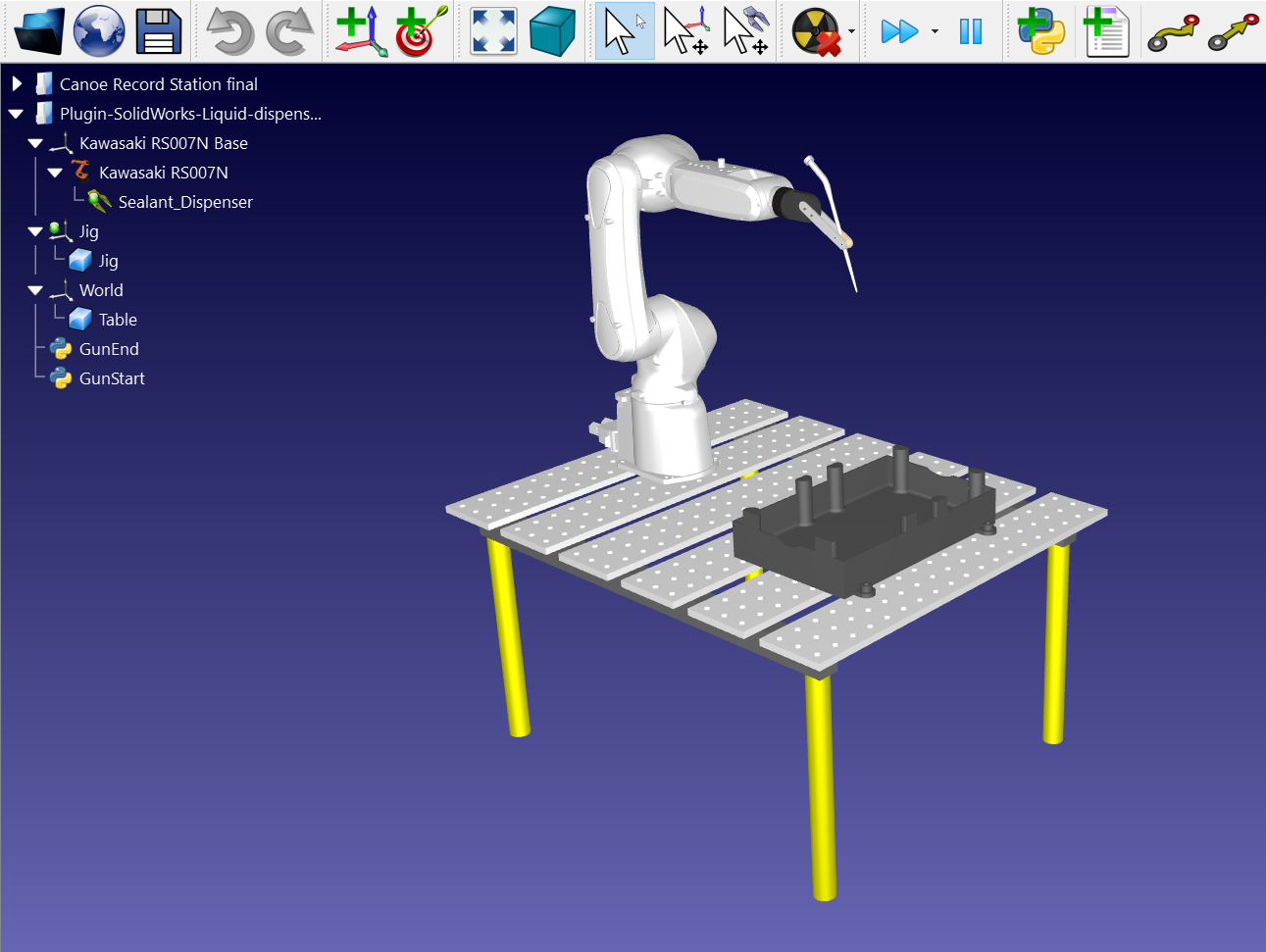
Ora che ha caricato la stazione, può aprire SolidWorks.
Schizzo 2D da SolidWorks
Apra il suo oggetto 3D in SolidWorks. In questo esempio, l'oggetto 3D è una coppa dell'olio con sopra la scanalatura da riempire.
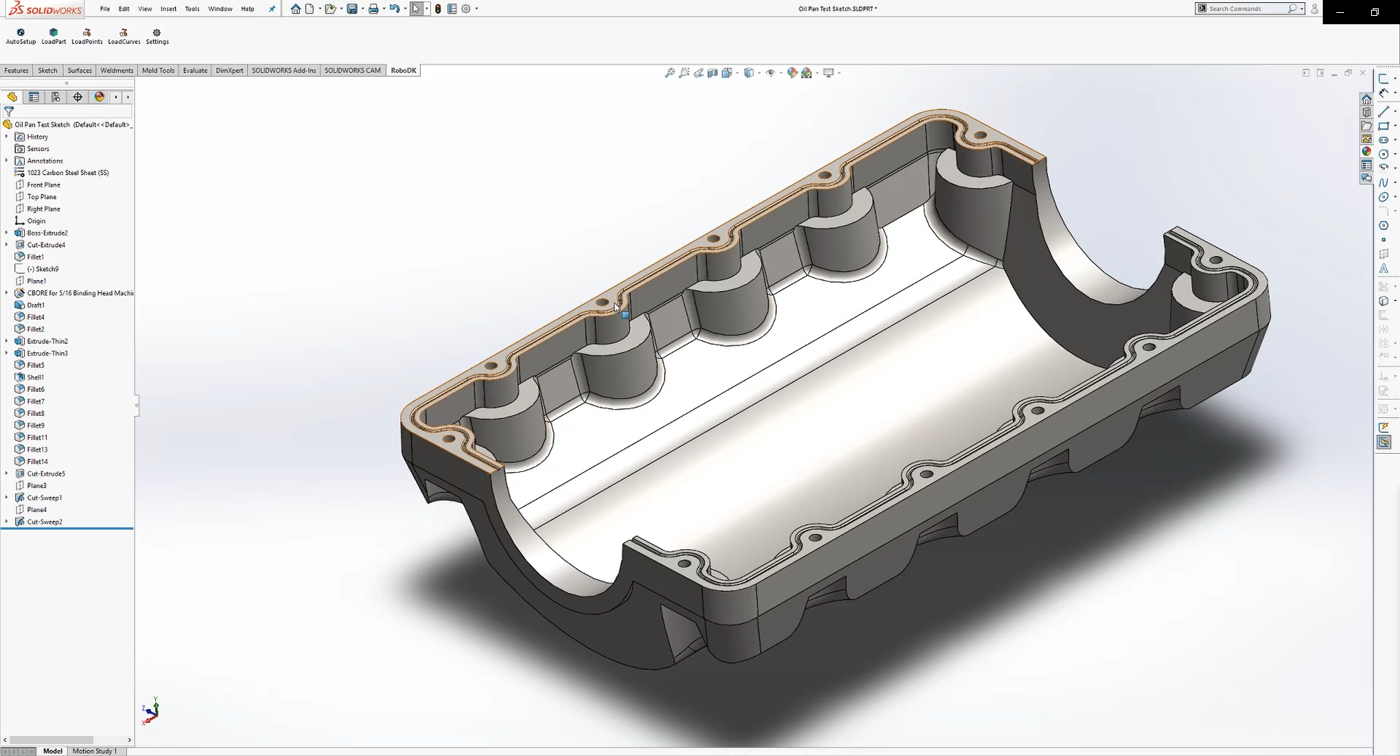
L'obiettivo di questo progetto è quello di erogare i sigillanti al centro della scanalatura al livello della superficie superiore, senza mettere il sigillante su entrambi i lati. In questo modo, il sigillante può scorrere senza problemi.
Qui si utilizza lo schizzo 2D. Deve iniziare creando un nuovo schizzo sopra la superficie piana:
1.Selezioni la scheda Schizzo e prema il pulsante Schizzo per crearne nuovo.
2.Selezioni uno dei bordi del suo oggetto 3D
3.Clicchi con il tasto destro del mouse e prema Seleziona tangenza per selezionare automaticamente l'intero bordo della scanalatura.
4.Selezioni il pulsante Entità di offset per inserire la mezza larghezza della scanalatura. In questo caso il valore è 1,5 mm.
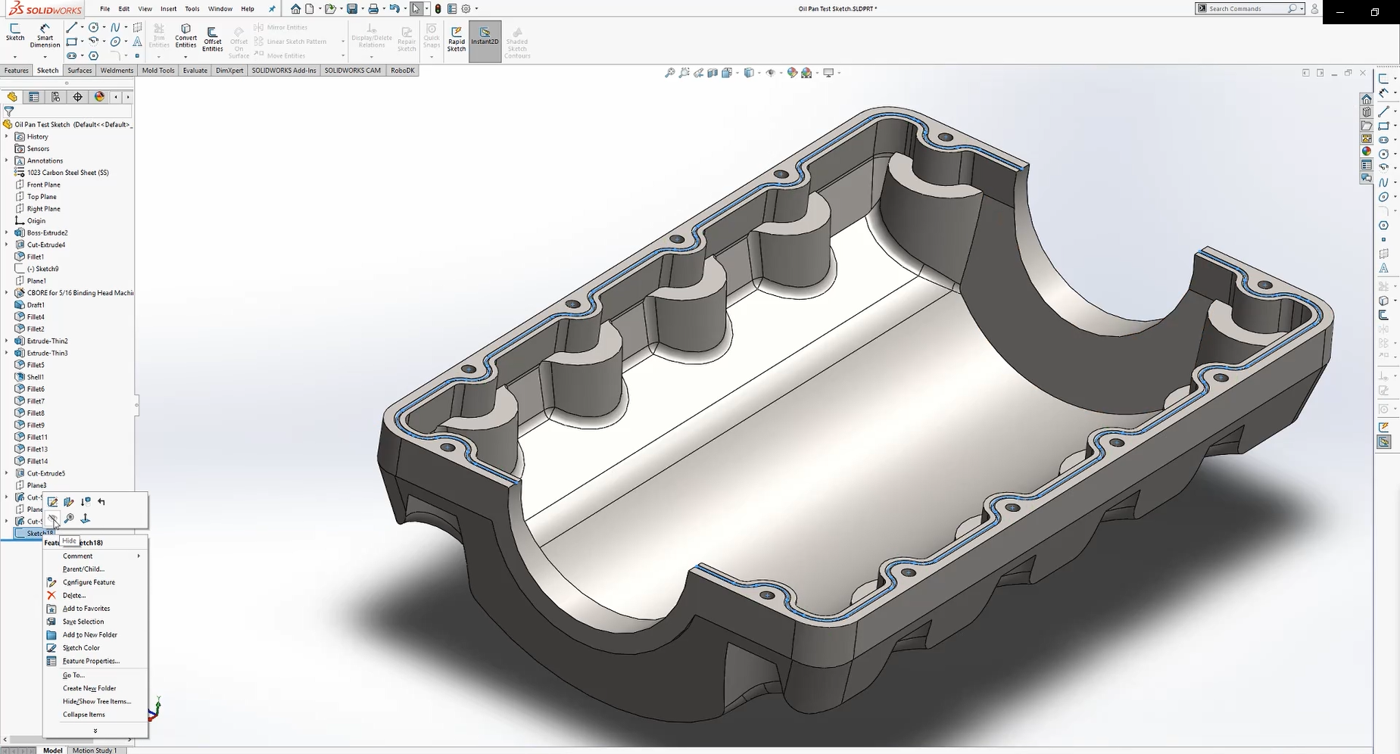
Avrà un percorso utensile completo per il suo robot. Rifaccia la stessa cosa per l'altro lato della coppa dell'olio. Si assicuri che il suo schizzo sia visibile come mostrato nell'immagine sottostante per poterlo selezionare con il plugin di RoboDK.
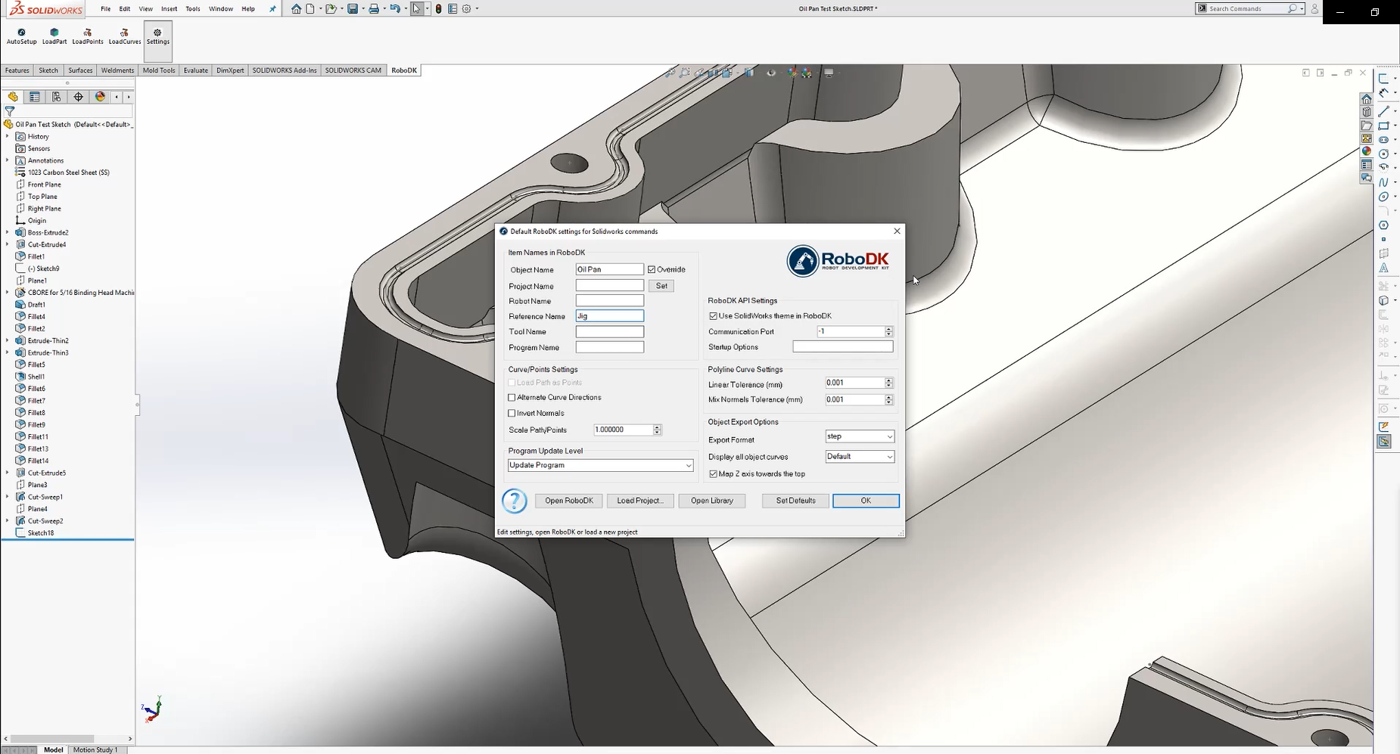
Segua i passi successivi per caricare il suo schizzo in RoboDK:
1.Selezioni la scheda RoboDK e selezioni
2.Inserisca il nome dell'oggetto che desidera in RoboDK. In questo esempio si tratta della coppa dell'olio.
3.Inserisca il nome di riferimento con cui desidera che venga esportato. In questo esempio è Jig.
4.Chiudere la finestra Impostazioni o selezionare OK.
5.Selezionare il pulsante
6.Selezioni tutte le linee e le superfici superiori del suo schizzo e prema OK.
7.Selezioni
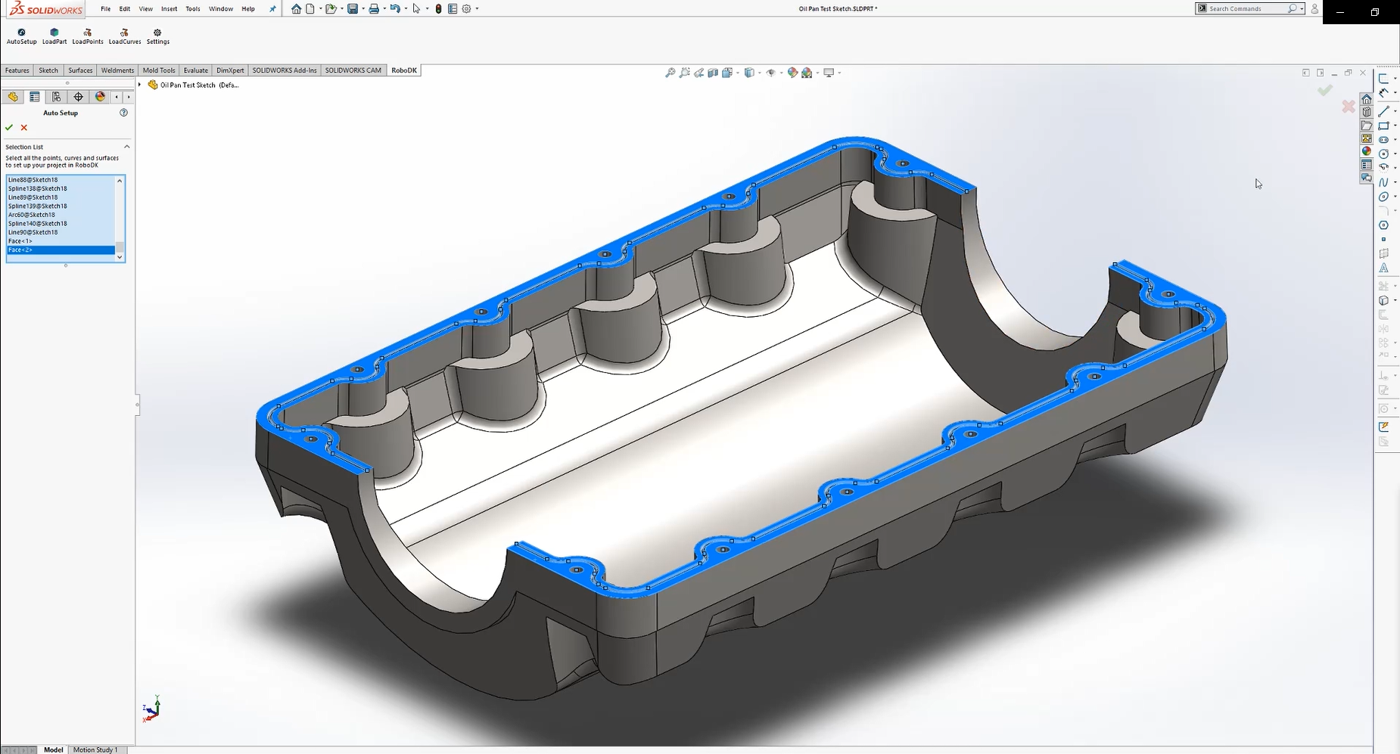
Dovrebbe vedere la parte caricata sul piano di riferimento attivo (Jig) e un nuovo progetto Curve follow in RoboDK che segue il percorso utensile.
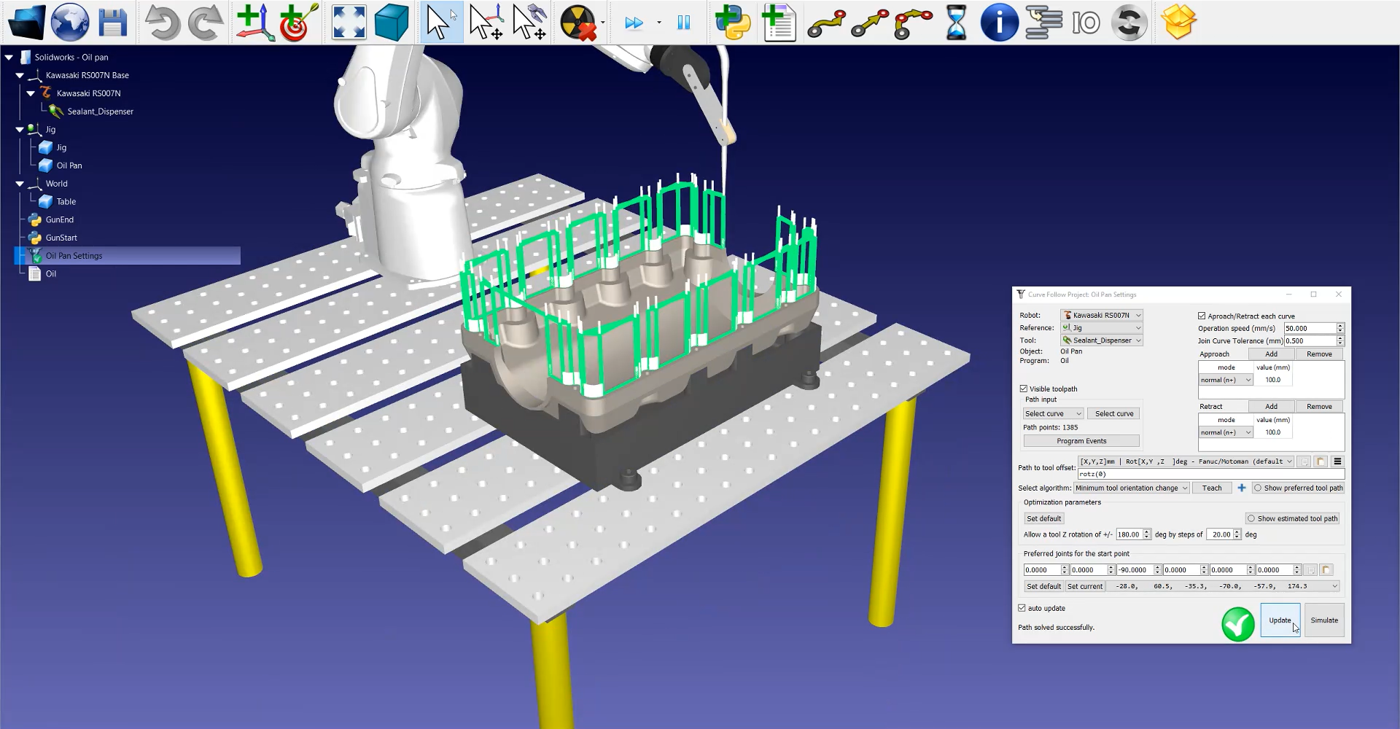
Stazione RoboDK
Il passo successivo consiste nel verificare se l'ordine di esecuzione delle sezioni del percorso è corretto, selezionando
Se desidera riordinare o cambiare il senso di una sezione di percorso, segua questi passaggi:
1.Corregga l'ordine delle sezioni del percorso cliccando su
2.Clicchi con il tasto destro del mouse su una sezione vuota della stazione e ripristini la selezione
3.Si rechi al punto di partenza del suo percorso e selezioni la prima sezione. Si assicuri che sia orientato nella direzione giusta cliccando con il tasto destro del mouse e, se necessario, prema Cambia senso.
4.Selezioni Selezione automatica curva successiva o Selezione automatica tutto per selezionare automaticamente ogni sezione del percorso nell'ordine giusto.
5.Selezioni Fatto. Questo la riporterà alla finestra di impostazione di RoboDK.
Poi dovrà regolare l'orientamento dello strumento:
1.Selezioni Mostra percorso utensile preferito per aiutare a visualizzare l'utensile lungo il percorso, come mostrato nell'immagine sottostante.
2.Modifichi il valore rotz. In questo esempio viene impostato -90 gradi.
3.Selezioni Aggiornamento➔ Simulazione.
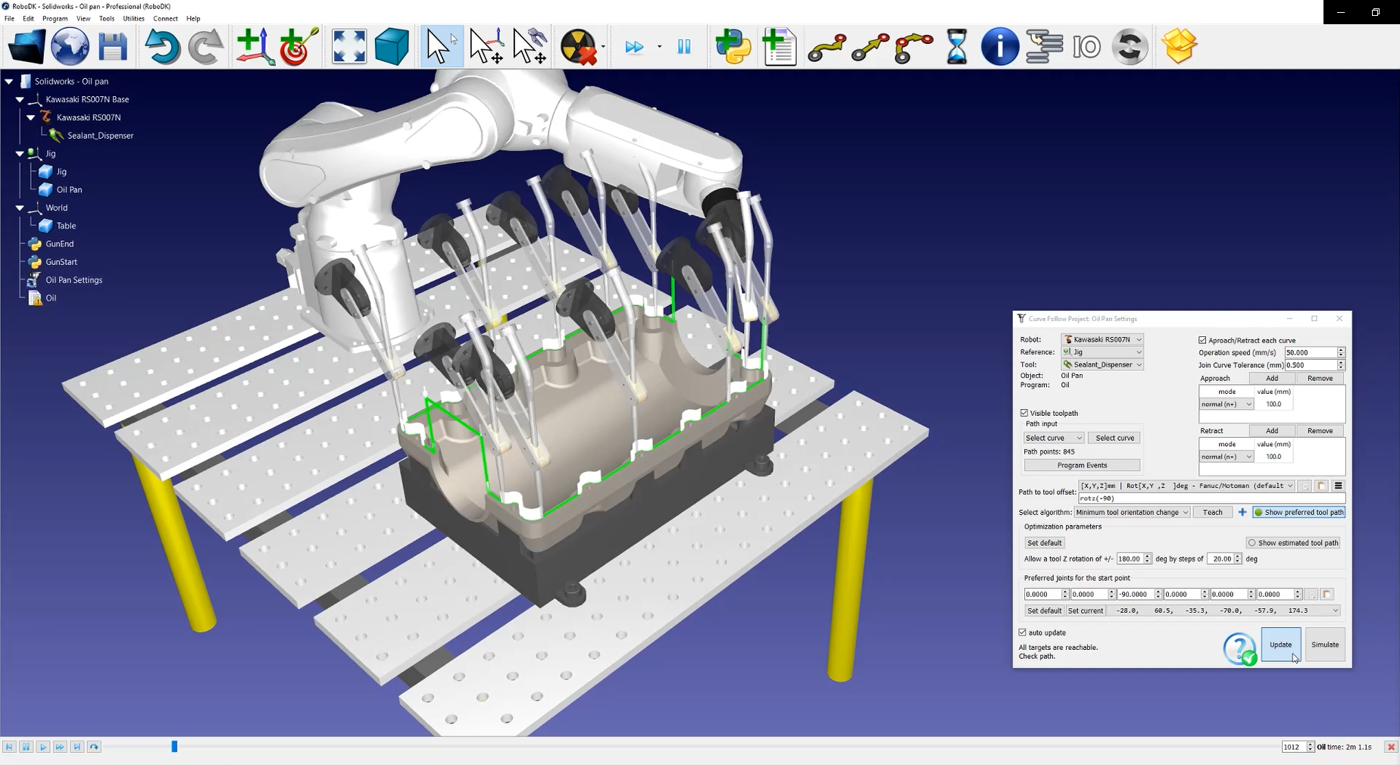
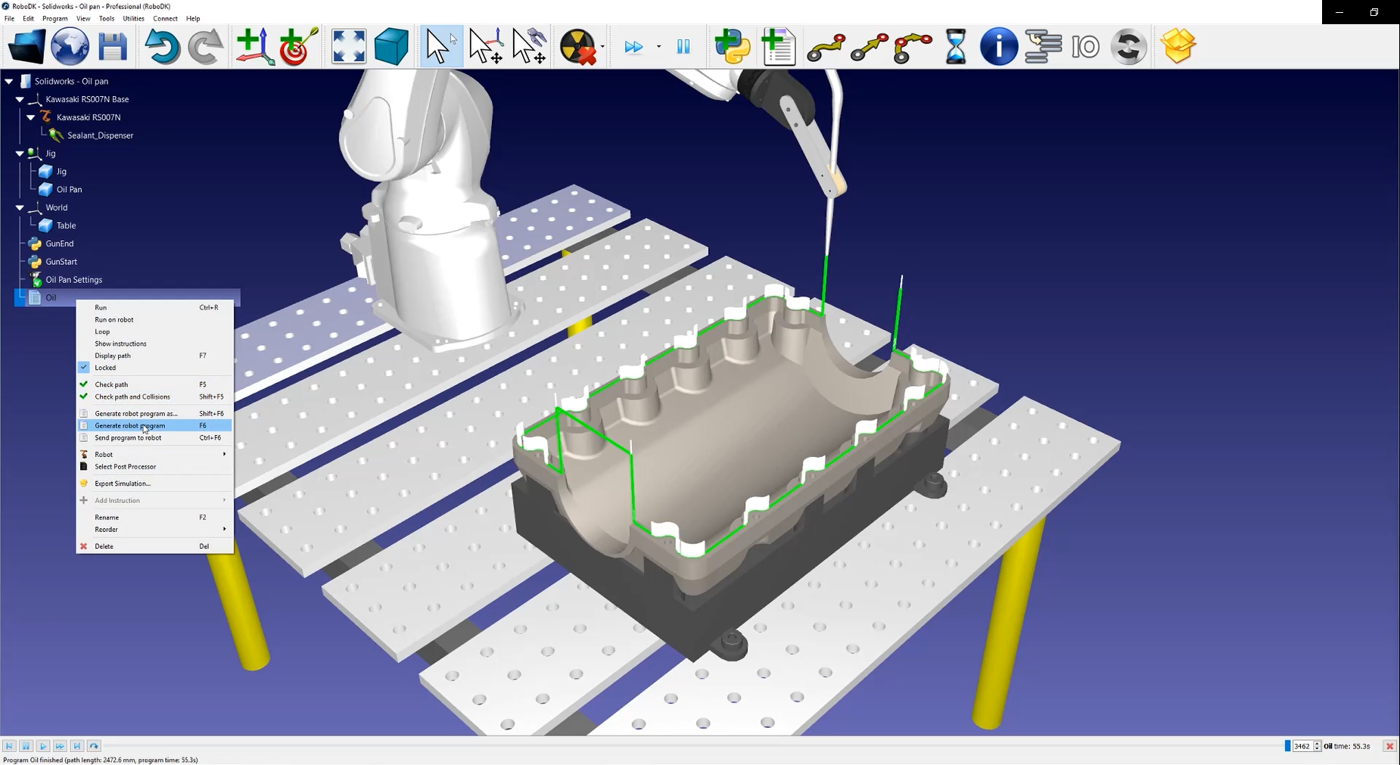
Per generare il programma del robot, clicchi con il tasto destro del mouse su
Il file .pg è ora pronto per essere trasferito al controller del robot.