Laser Cutting
Introduzione
Questa sezione la aiuterà a creare un progetto di base in RoboDK per la simulazione di robot e la programmazione offline. In questo esempio viene simulato e programmato un robot Motoman per un'applicazione di taglio laser utilizzando Fusion 360 e RoboDK.
Può scegliere tra due metodi diversi: Uno che utilizza il metodo di estrazione delle caratteristiche e uno che utilizza le caratteristiche di taglio laser di Fusion 360.
Con il plug-in RoboDK per Fusion 360 può caricare facilmente i modelli 3D creati in Fusion 360 in RoboDK. Questo plug-in le consente di programmare oltre 50 diversi produttori di robot e 500 robot direttamente da Autodesk Fusion 360.
Il plug-in RoboDK per Fusion 360 è gratuito se possiede una licenza RoboDK.
Esempio di taglio laser
Per avviare il progetto, dovrà prima selezionare l'esempio di taglio laser di RoboDK nella libreria predefinita.
Impostazione
Questo esempio utilizza il robot Motoman MH50-35, una testa di taglio laser, un pezzo di metallo stampato e un tavolo di taglio laser.
Carica la stazione:
1.Selezionare File ➔
2.Individui l'esempio di Taglio laser dalla sezione Esempi di RoboDK:
C:/RoboDK/Examples/Plugin-Fusion-360-Laser-Cutting.rdk.
Si noti che il piano di riferimento
Dopo aver caricato la stazione, può aprire Fusion 360.
Metodo 1: estrazione delle caratteristiche
Apra il suo oggetto 3D in Fusion 360. In questo esempio, l'oggetto 3D è un pezzo di metallo stampato
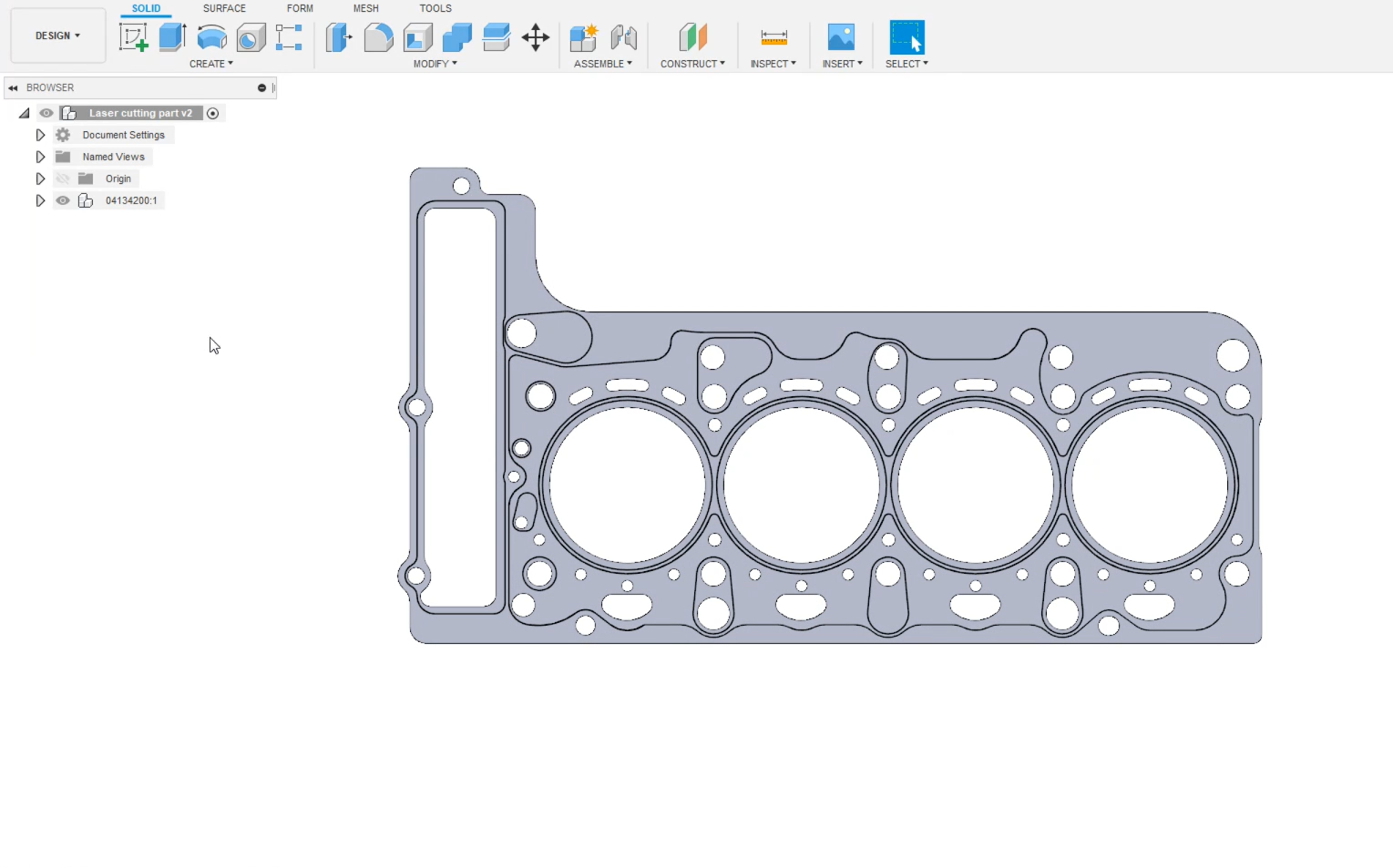
L'obiettivo di questo progetto è creare automaticamente un programma robotico che taglierà tutti quei fori con una fresa leaser. La programmazione manuale richiederebbe troppo tempo.
1.Selezioni la sezione Design di Fusion nell'angolo in alto a sinistra.
2.Selezioni la scheda Strumenti. Qui troverà il plugin RoboDK.
3.Clicchi sul pulsante
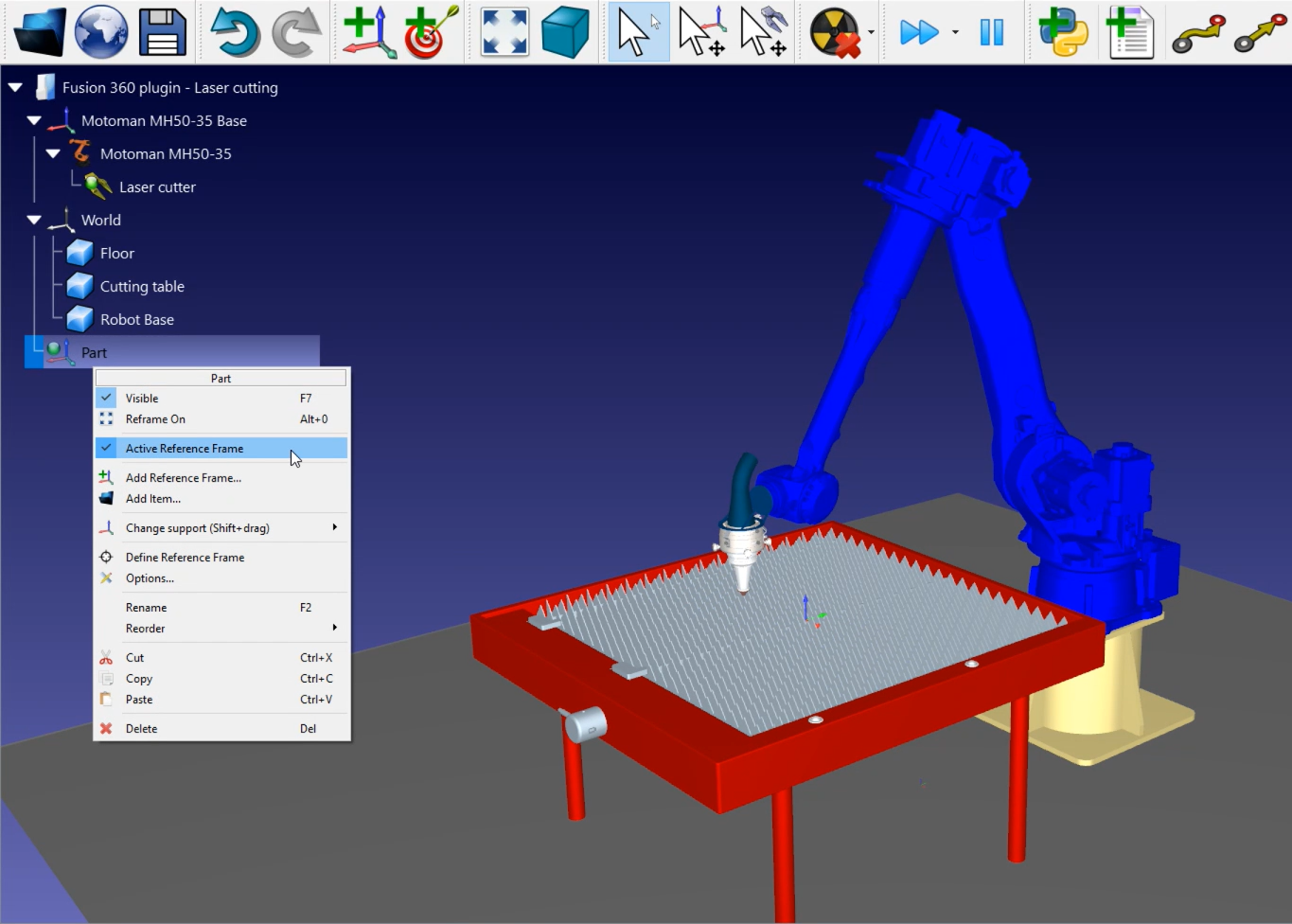
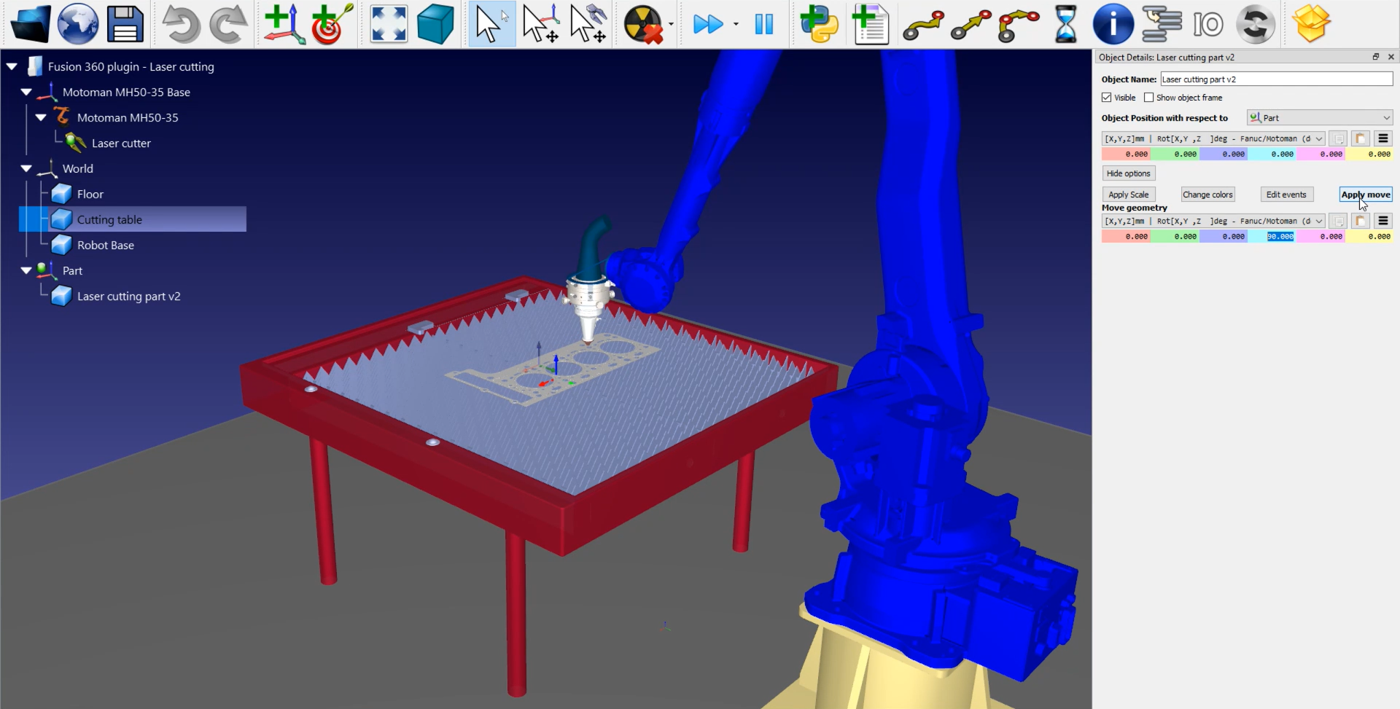
La parte è stata importata nel piano di riferimento attivo della sua stazione RoboDK. Si assicuri che la parte sia stata importata con il giusto orientamento. In questo esempio, dovrà modificare l'orientamento della parte.
Segua i passi successivi per modificare l'orientamento della sua parte:
1.Clicchi due volte sulla parte di taglio laser
2.Clicchi su Altre opzioni nel menu aperto.
3.Vada su Sposta geometria e inserisca 90 nell'asse X (blu chiaro), come mostrato nell'immagine qui sopra.
4.Clicchi su Applica spostamento per salvare l'orientamento.
Il plugin RoboDK ha un'altra funzione in Fusion 360 che la aiuterà a importare il suo percorso di taglio in RoboDK.
1.Torni a Fusion 360.
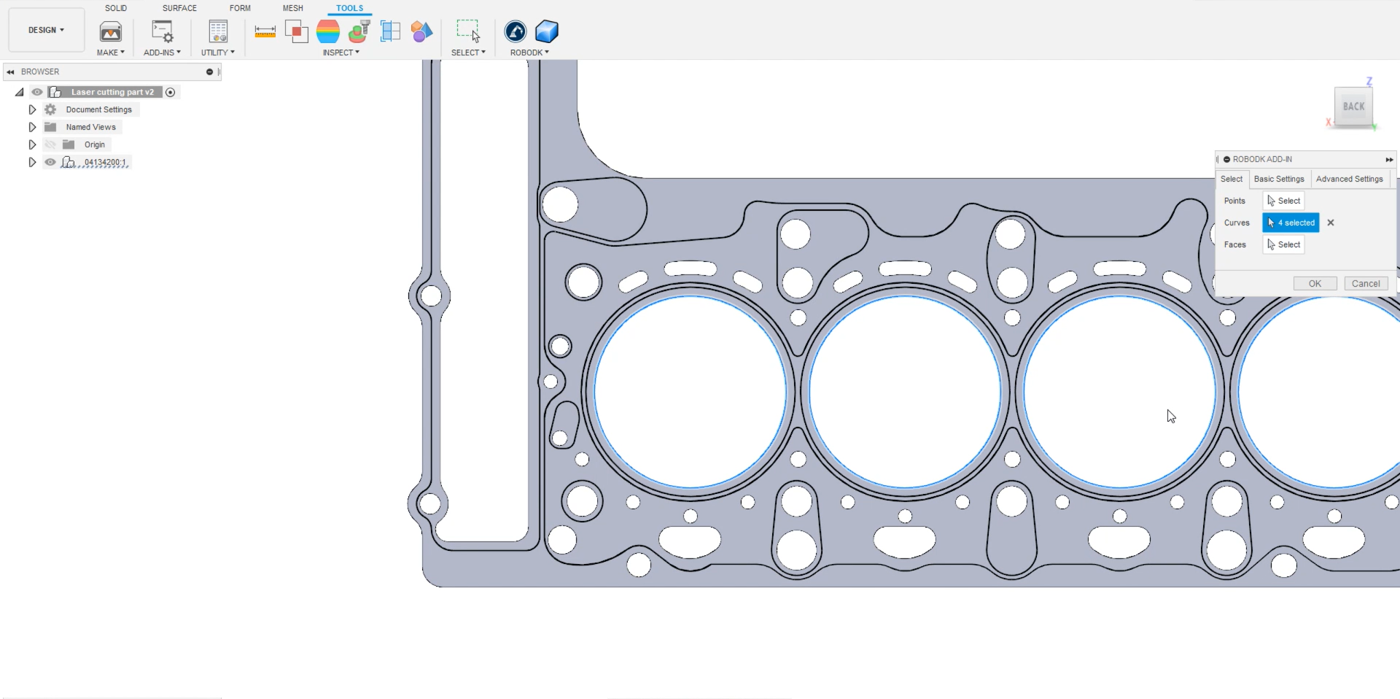
2.Nel menu del plugin RoboDK, selezioni Curva/e di carico.
3.Selezioni Curve nel menu aperto.
4.Selezioni i bordi dei quattro cerchi grandi, come mostrato nell'immagine sottostante.
Ora dovrà dare a RoboDK un orientamento per lo strumento robot.
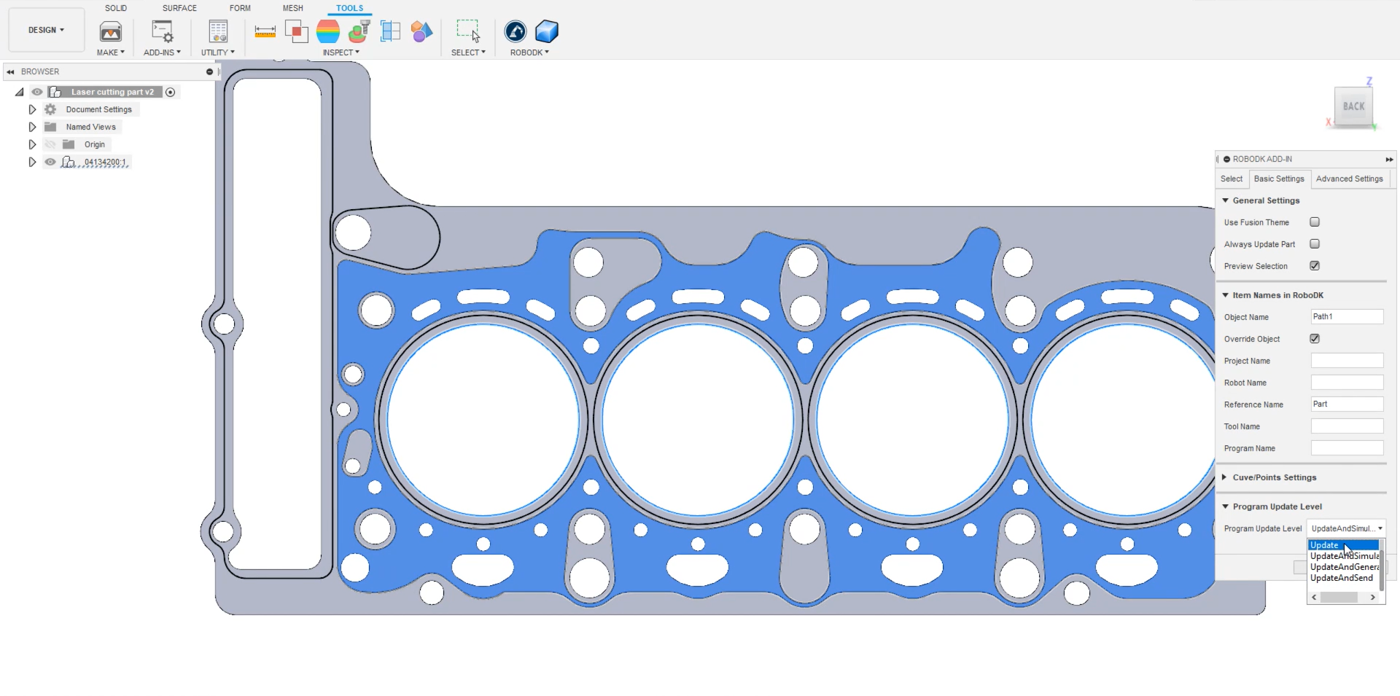
1.Selezioni Volti nel menu aperto.
2.Selezioni le facce a cui desidera che lo strumento sia normale, come mostrato nell'immagine sottostante.
Ora può configurare le impostazioni:
1.Nello stesso menu, vada su Impostazioni di base.
2.Deselezioni il tema Usa Fusion se preferisce mantenere il comportamento predefinito di RoboDK.
3.Inserisca un Nome oggetto per denominare il suo percorso. In questo esempio sarà il Percorso 1.
4.Inserisca un Nome di riferimento in cui desidera che venga esportato. In questo esempio si chiama Parte, come nella stazione RoboDK.
5.Selezioni Aggiornamento nel Livello di aggiornamento del programma per avere più opzioni in seguito, come mostrato nell'immagine qui sopra. Questo è opzionale.
6.Clicchi su OK.
Ora dovrebbe essere in grado di vedere il percorso importato in RoboDK. In questo esempio, l'orientamento è di nuovo sbagliato e dovrà modificare l'orientamento come ha fatto per la parte precedente.
1.Clicchi due volte sul suo percorso, che in questo esempio è
2.Clicchi su Altre opzioni nel menu aperto.
3.Vada a Spostare la geometria e inserisca 90 nell'asse X (blu chiaro).
4.Clicchi su Applica spostamento per salvare l'orientamento.
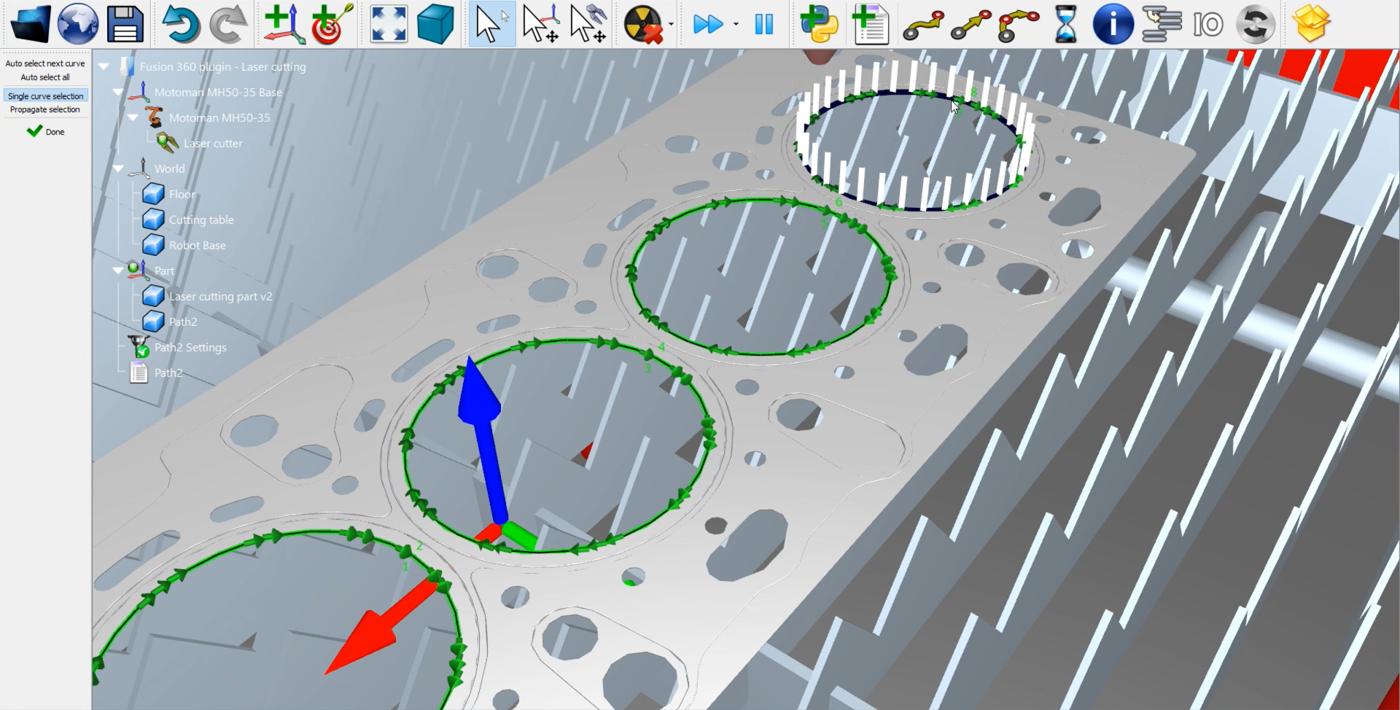
Il passo successivo consiste nel verificare se l'ordine di esecuzione delle sezioni del percorso è corretto, selezionando
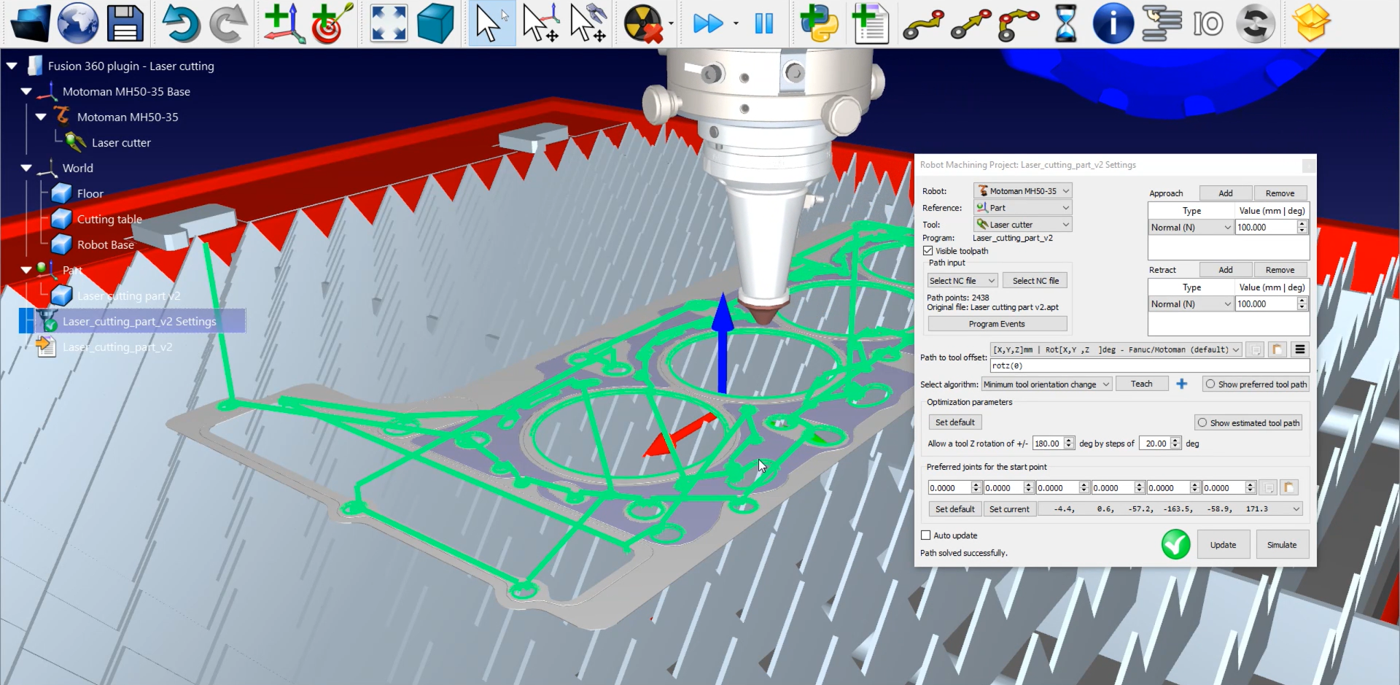
1.Faccia doppio clic sulle impostazioni del percorso, qui
2.Si assicuri che il robot, il riferimento e lo strumento siano quelli giusti.
3.Clicchi su Seleziona curva.
4.Selezioni gli altri cerchi.
5.Clicchi su
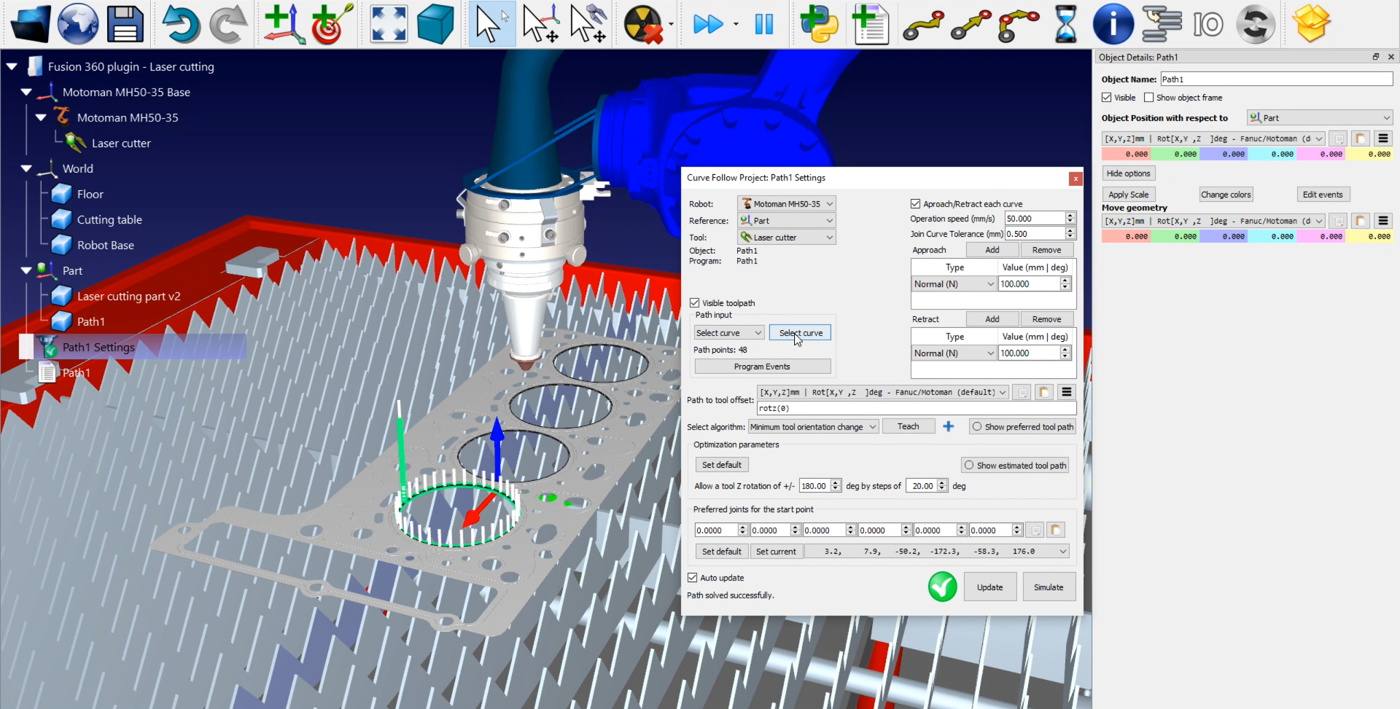
Ora può notare che i movimenti di avvicinamento e di ritrazione sono un po' troppo lunghi in termini di lunghezza.
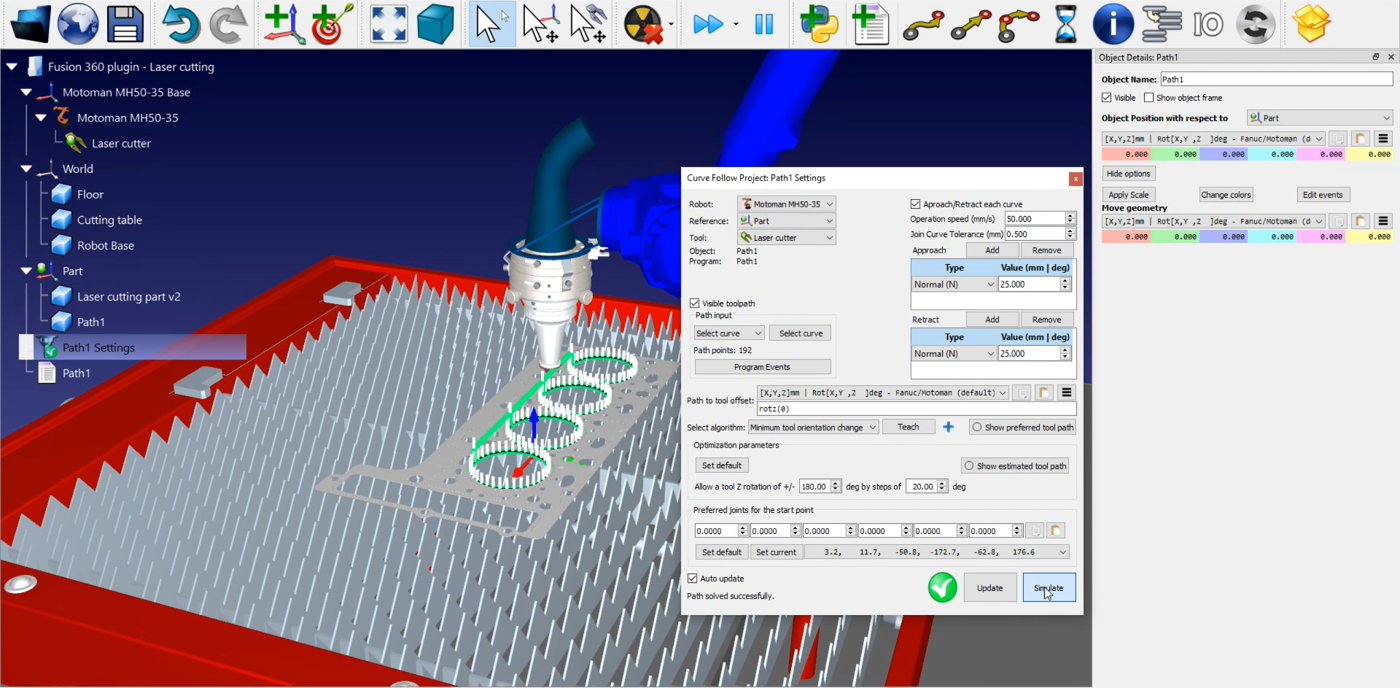
Può modificare facilmente questi valori:
1.Faccia doppio clic sulle impostazioni del percorso, qui
2.Inserisca un valore più piccolo nelle caselle Avvicinamento e Ritrazione. In questo esempio, può inserire 25 mm.
3.Clicchi su Aggiorna➔ Simulazione.
Il passo successivo è considerare il raggio del laser. In questo esempio, il laser sta tagliando troppo materiale.
Come impostare il raggio laser:
1.Torni a Fusion 360.
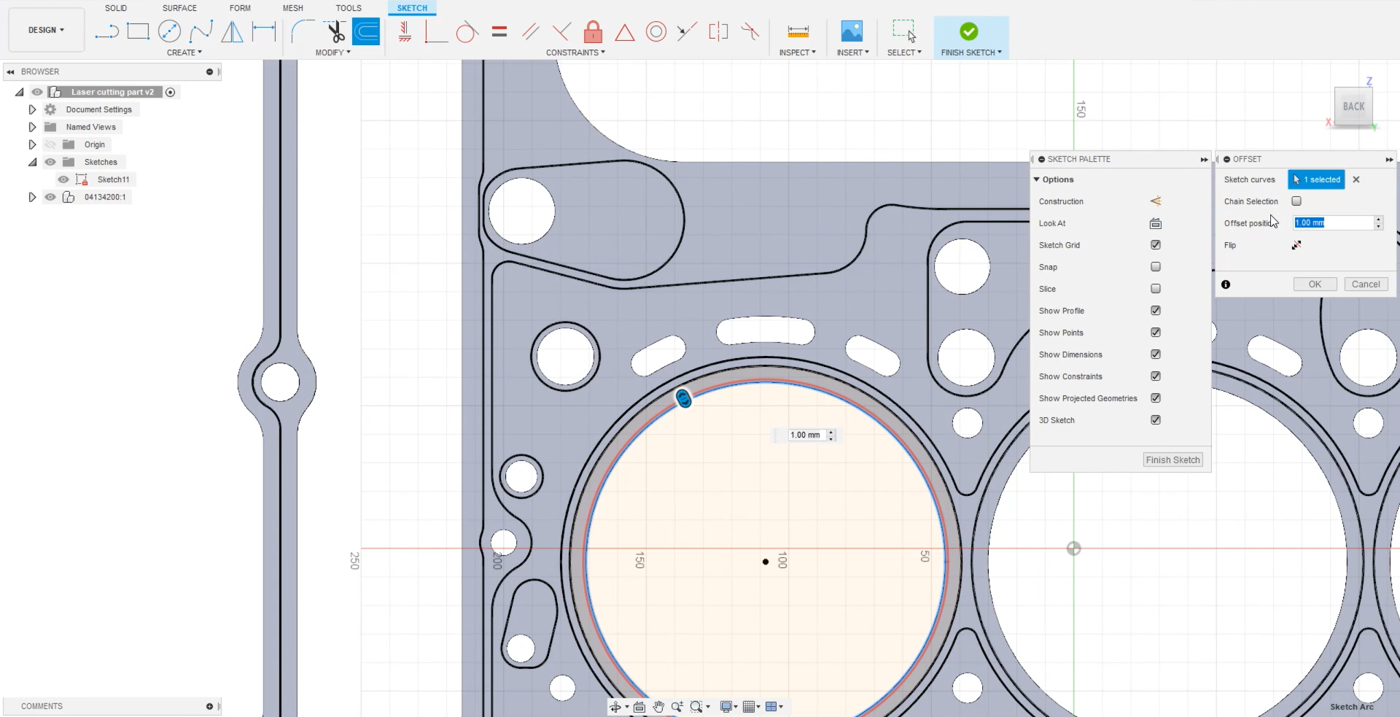
2.Vada alla scheda Solido➔ Crea schizzo per creare il suo schizzo.
3.Selezioni un cerchio e clicchi su Offset nel menu in alto per creare un nuovo percorso.
4.Considerando che il diametro del raggio laser è di 2 mm, il raggio sarà di 1 mm. Inserisca 1 nella casella Posizione offset, come mostrato nell'immagine sottostante.
5.Ripeta questi passaggi per gli altri 3 cerchi.
6.Clicchi su Ok.
Ora può caricare le curve in RoboDK.
1.Vada alla scheda Strumenti.
2.Clicchi su RoboDK➔ Curve di carico.
3.Selezioni Curve e clicchi sullo schizzo in ogni cerchio.
4.Selezioni Volti e clicchi sul volto che desidera che lo strumento sia normale.
5.In questo esempio, il nome dell'oggetto (Impostazioni di base) è Percorso2.
6.Clicchi su Ok per importare il percorso in RoboDK.
Può modificare l'orientamento del Percorso2 come spiegato sopra. Se si avvicina, può vedere la differenza tra i due percorsi. Ora può eliminare il Percorso1.
Il passo successivo consiste nel verificare se le sezioni di percorso caricate sono corrette:
1.Selezionando
2.Clicchi su Seleziona curva e selezioni gli altri cerchi, come mostrato nell'immagine sottostante.
3.Selezioni
Può ridurre le dimensioni dei movimenti di Avvicinamento e Ritrazione come spiegato sopra. In questo esempio, può inserire nuovamente 25 mm. Non dimentichi di aggiornare➔ Simulare il progetto Curve Follow per salvare le impostazioni. Può eseguire gli stessi passaggi per tutti gli altri fori di questa parte.
Questo modo di costruire un programma di taglio laser funziona per il plugin Fusion 360 di RoboDK, ma anche per tutti i plugin CAD.
Metodo 2: Caratteristiche del taglio laser di Fusion 360
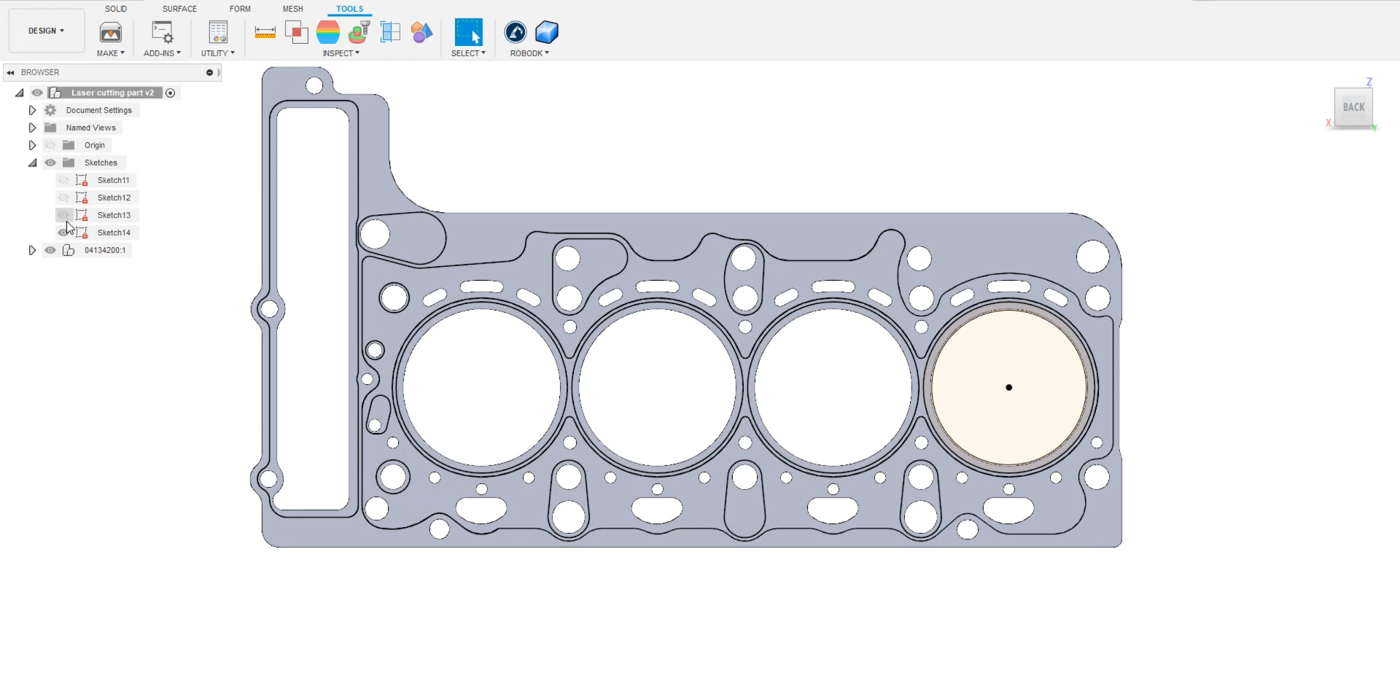
Per utilizzare le funzioni di taglio laser di Fusion 360, torni a Fusion e nasconda gli schizzi fatti in precedenza, come mostrato nell'immagine sottostante.
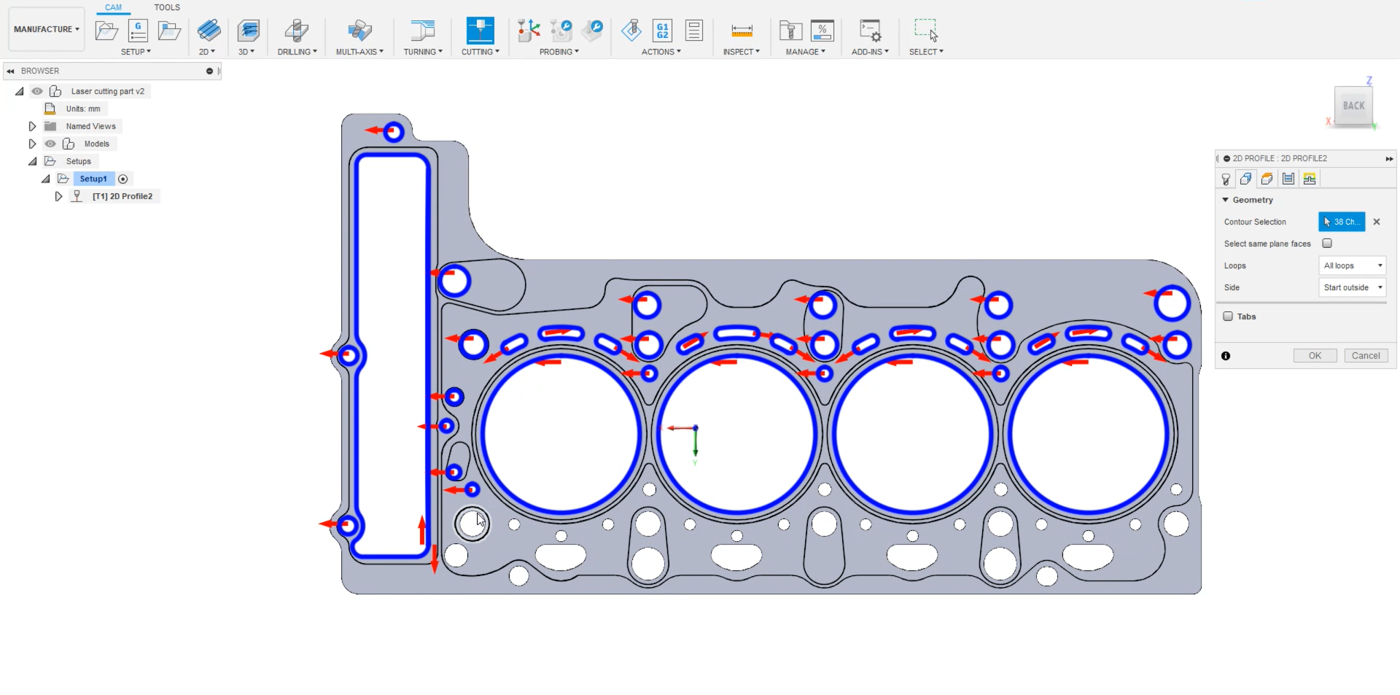
Passi dalla sezione Progettazione nel menu in alto a sinistra a Produzione. Nella barra degli strumenti clicchi sulla funzione di taglio 2D.
1.Selezioni un utensile. In questo esempio si tratta di una fresa larga 1 mm.
2.Vada alla scheda Geometria nello stesso menu e selezioni i cerchi che desidera tagliare. In questo esempio, tutti i fori del pezzo di metallo stampato sono selezionati come mostrato nell'immagine sottostante.
3.Clicchi su OK.
Può simulare il percorso in Fusion 360 facendo clic con il pulsante destro del mouse sul percorso e selezionando Simula. Nella Configurazione, si assicuri di utilizzare la stessa origine del modello. In questo modo, verrà esportato nella posizione giusta.
1.Clicchi con il tasto destro del mouse su Setup1➔ Modifica.
2.Si assicuri che l'origine del modello sia selezionata nella casella Origine.
3.Selezionare Ok.
Ora può trasferire il suo schizzo a RoboDK selezionando Strumenti➔ Carica progetto CAM in RoboDK nella scheda Fusion 360.
Dovrebbe vedere lo schizzo importato in RoboDK. Si assicuri di eliminare il percorso precedente, in questo esempio il Percorso2. Clicchi due volte su
L'unica cosa da gestire è il Programma Eventi:
1.Clicchi su Eventi del programma.
2.Lasci libere le prime tre caselle di testo, poiché non sta realizzando un progetto di lavorazione con un mandrino, più utensili o un numero di giri specifico da raggiungere.
3.Selezioni la casella Inizio percorso e scriva LaserOn per attivare il laser solo all'inizio del percorso.
4.Selezioni la casella Fine percorso e scriva LaserOff per disattivare quando il percorso termina.
5.Clicchi su Ok e su Aggiorna.
Per generare il programma del robot, clicchi con il tasto destro del mouse su
Il file .pg è ora pronto per essere trasferito al controller del robot.