Pick and Place
Introduzione al pick and place
Pick and Place si riferisce al processo automatizzato in cui i robot prelevano pezzi o articoli da una posizione e li collocano in un'altra. L'automazione delle operazioni di pick and place aiuta ad aumentare i tassi di produzione.
I robot pick and place possono gestire compiti ripetitivi, liberando i lavoratori umani per concentrarsi su lavori più complessi. Questi sistemi robotizzati sono un componente cruciale in molte linee di produzione per automatizzare compiti ripetitivi e che richiedono tempo.
Video: Guardi questo video tutorial che introduce il Pick and Place con i robot: Pick and Place - Webinar RoboDK.
I bracci robotici possono eseguire facilmente operazioni di pick and place. Anche se esistono bracci robotici dedicati a determinate applicazioni di pick and place (come la pallettizzazione per la pallettizzazione, o i robot Scara per l'assemblaggio di PCB), un braccio robotico generico a 6 assi è adatto a qualsiasi operazione di pick and place.
Esempi di Pick and Place
Può trovare alcuni progetti di esempio per eseguire simulazioni di pick and place in questa sezione della documentazione.
Gli esempi in questa sezione includono:
1.Un semplice esempio di pick and place, in cui un robot preleva un pezzo e lo lascia cadere da un'altra parte.
2.Un esempio di pick and place con un'operazione di assemblaggio.
3.Un esempio di pick and place utilizzando l'addin di pallettizzazione.
4.Un esempio di pick and place utilizzando l'API.
Esempio di pick and place semplice
Questa sezione mostra un semplice esempio di pick and place utilizzando un braccio robotico con una pinza a vuoto che sposta una scatola.
Segua questi passaggi per creare il suo esempio di pick and place:
Creare un nuovo progetto RoboDK
Questi passaggi le mostreranno come creare un nuovo progetto (noto anche come stazione) in RoboDK per un'applicazione di pick and place.
1.Aprire RoboDK: avviare l'applicazione RoboDK sul suo computer.
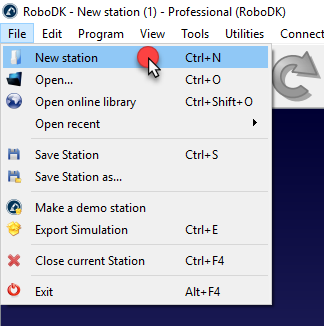
2.Crei una nuova stazione: Selezioni File-Nuova stazione dal menu principale di RoboDK: verrà creata una nuova stazione vuota come spazio di lavoro.
3.Aggiungere un robot dalla Biblioteca
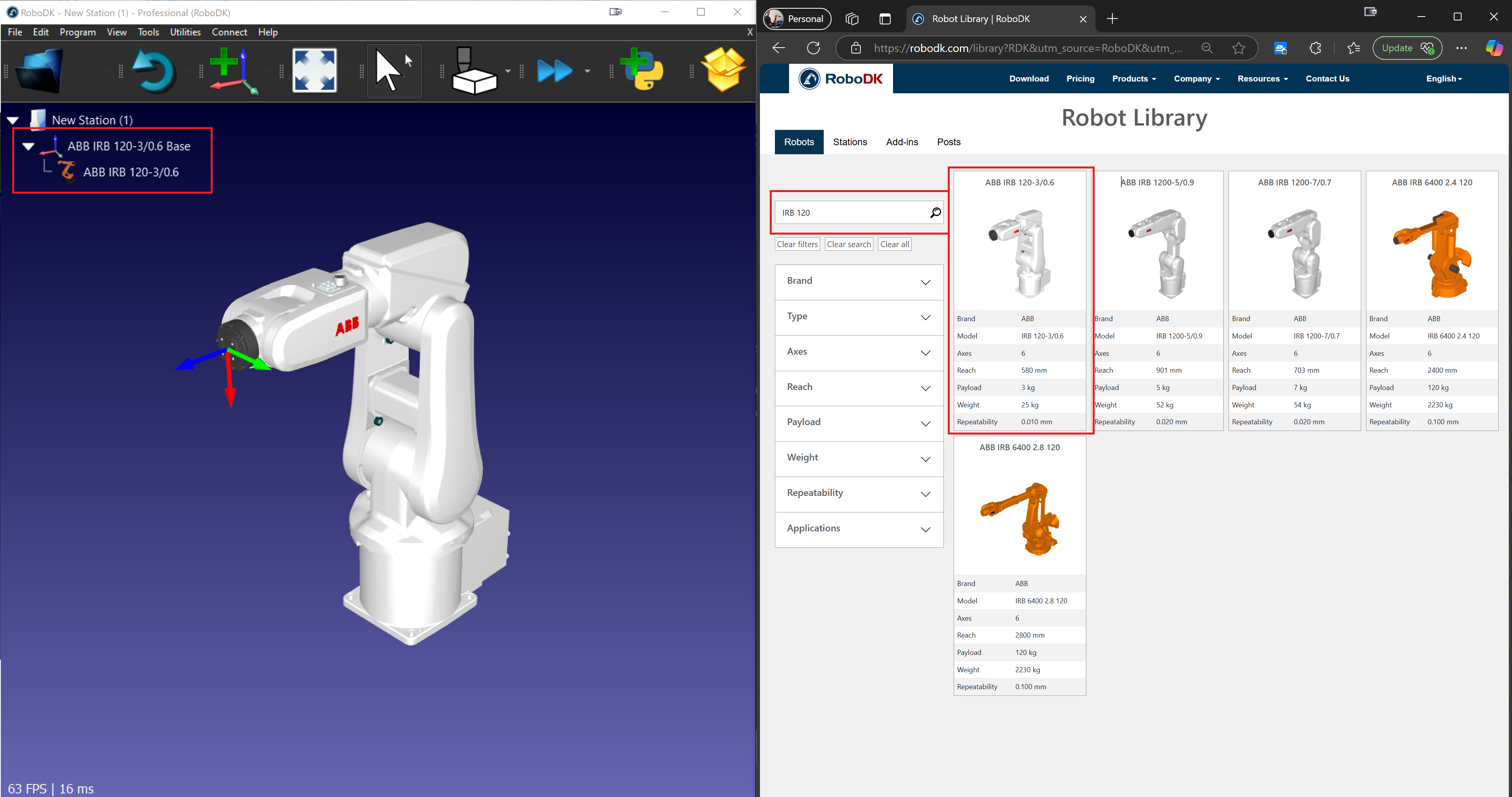
a.Apra la libreria di robot online per scaricare un robot
i.Nel menu principale, selezioni File → Apri libreria online.
ii.Si aprirà la finestra Libreria RoboDK, che mostra una serie di robot industriali.
b.Selezionare e importare un robot:
i.Utilizzi la barra di ricerca per trovare un robot adatto ai compiti di pick-and-place (ad esempio, UR10, ABB IRB 120, Fanuc LR Mate).
ii.Clicchi sul robot desiderato e selezioni Download.
c.Posizionare il robot nella stazione:
i.Il robot apparirà automaticamente nella stazione.
ii.Utilizzi lo strumento Sposta per regolare il suo posizionamento, se necessario.
4.Aggiunga un piano di riferimento.
a.Creare un Piano di riferimento:
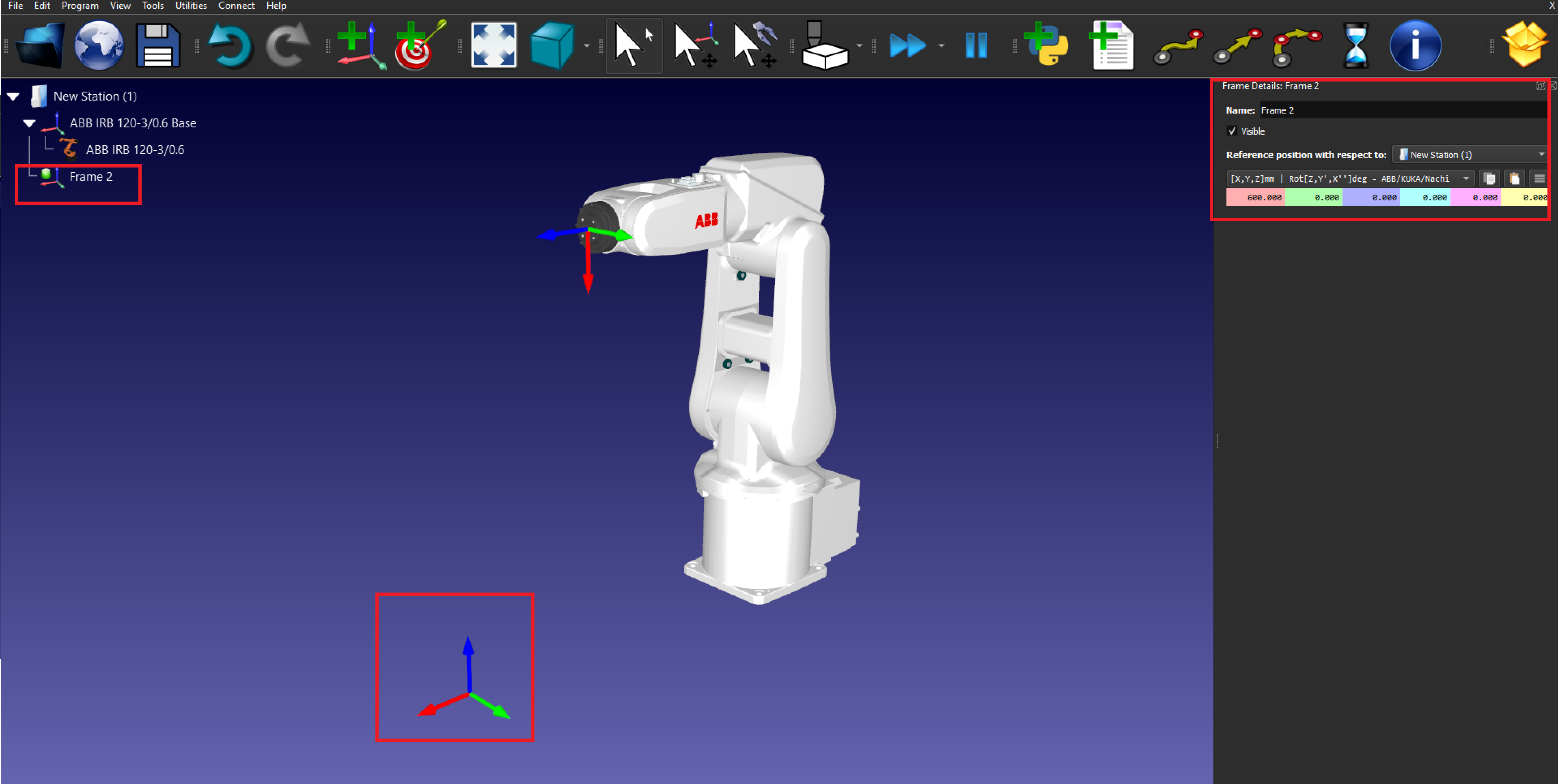
i.Vada su Programma → Aggiungi piano di riferimento.
ii.Un nuovo piano di riferimento apparirà nella struttura della stazione e nella vista 3D.
b.Posizionare il Piano di riferimento:
i.Clicchi due volte sul piano di riferimento per inserire le coordinate (X, Y, Z) e i valori di rotazione.
ii.Clicchi su OK per salvare la posizione.
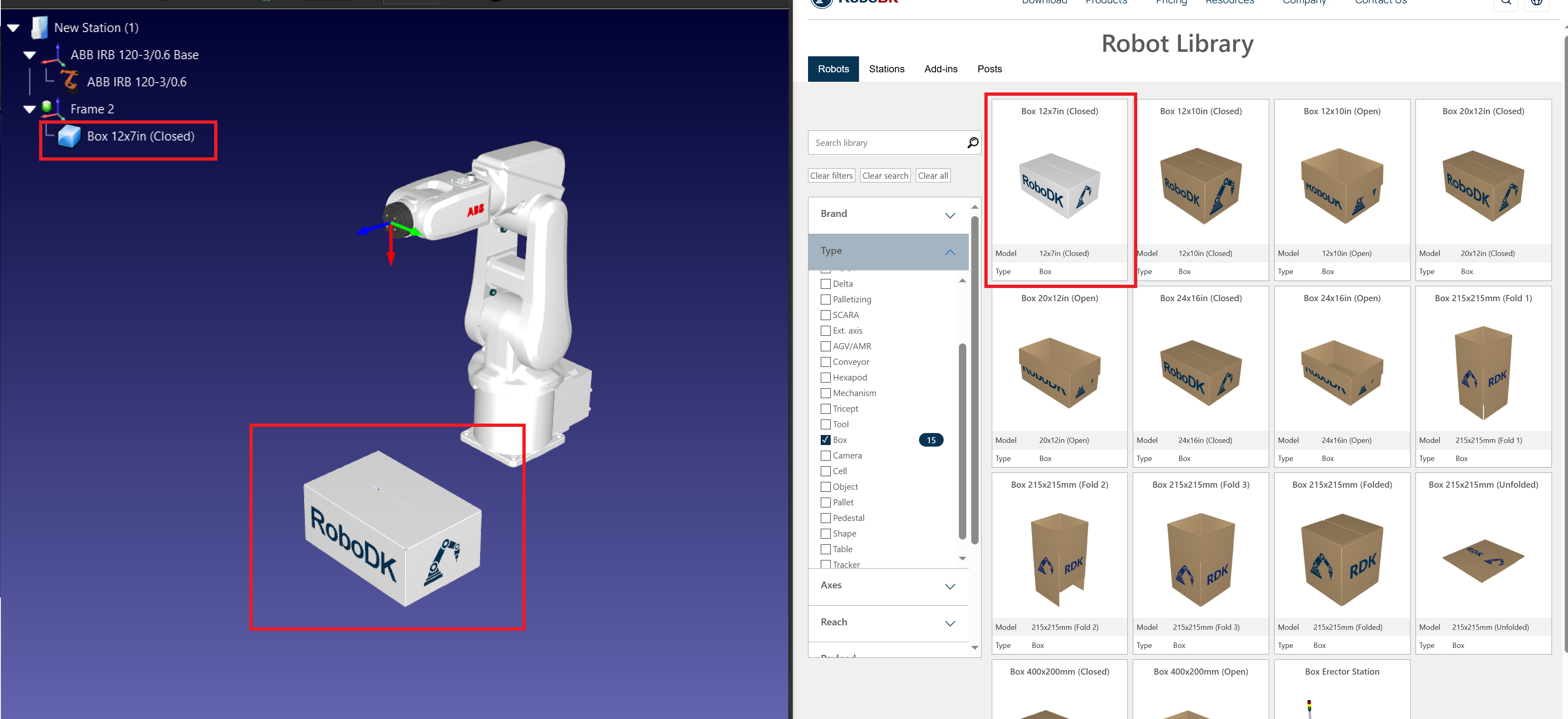
5.Importazione di oggetti 3D
a.Caricare i modelli di oggetti:
iii.Nel menu principale, selezioni File → Apri.
iv.Sfoglia e seleziona i modelli 3D degli oggetti da prelevare e posizionare (ad esempio, file STEP, IGES).
b.Posizionare gli oggetti:
v.Utilizzi lo Strumento Sposta per regolare la posizione dell'oggetto nei piani di riferimento.
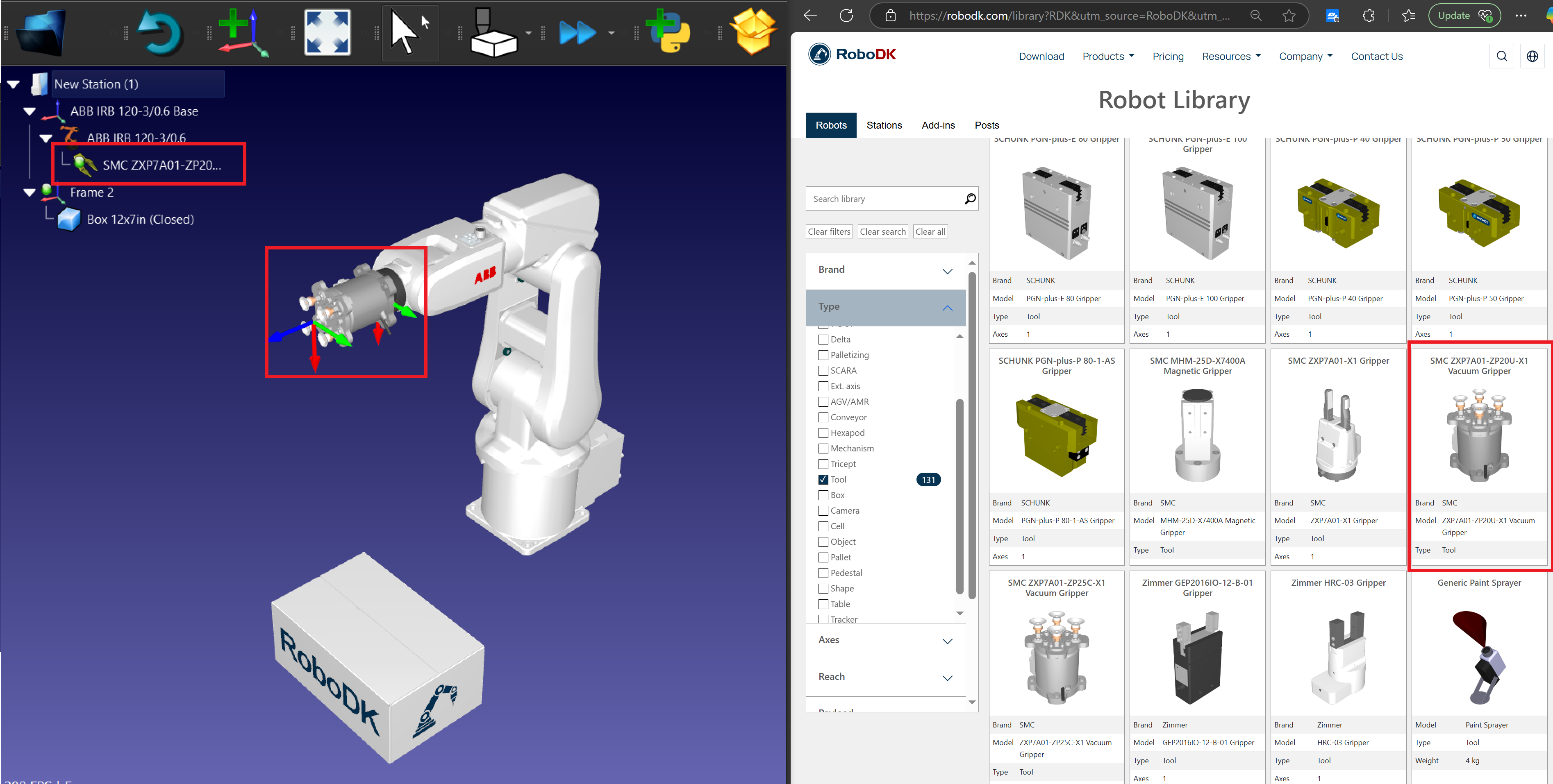
6.Aggiungere un utensile (pinza)
a.Selezionare una pinza:
i.Nel menu principale, vada su Utilità → Aggiungi strumento (TCP).
ii.Scegliere una pinza dalla Libreria Robot o importare un file di pinza personalizzato.
b.Collegare l'utensile al robot:
i.Fare clic con il pulsante destro del mouse sulla pinza nella struttura delle stazioni e selezionare Attacca al robot.
ii.Scelga la flangia del robot appropriata.
c.Definisca il TCP (Punto Centrale Utensile): Clicchi due volte sull'utensile e inserisca le coordinate TCP rispetto alla flangia del robot.
Creare bersagli per il Pick and Place
Segua questi passaggi per creare un bersaglio di base in RoboDK per un'applicazione di pick and place.
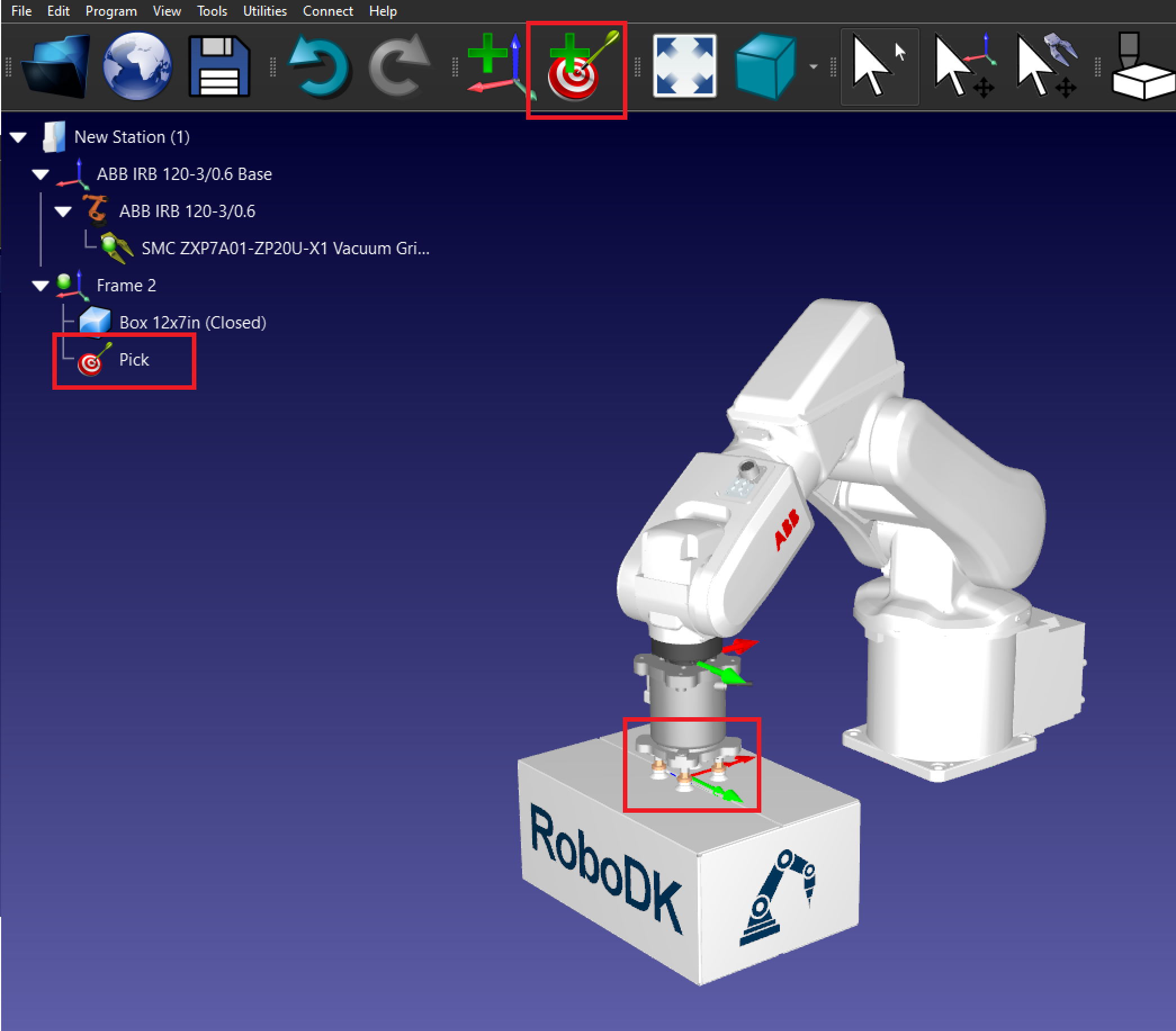
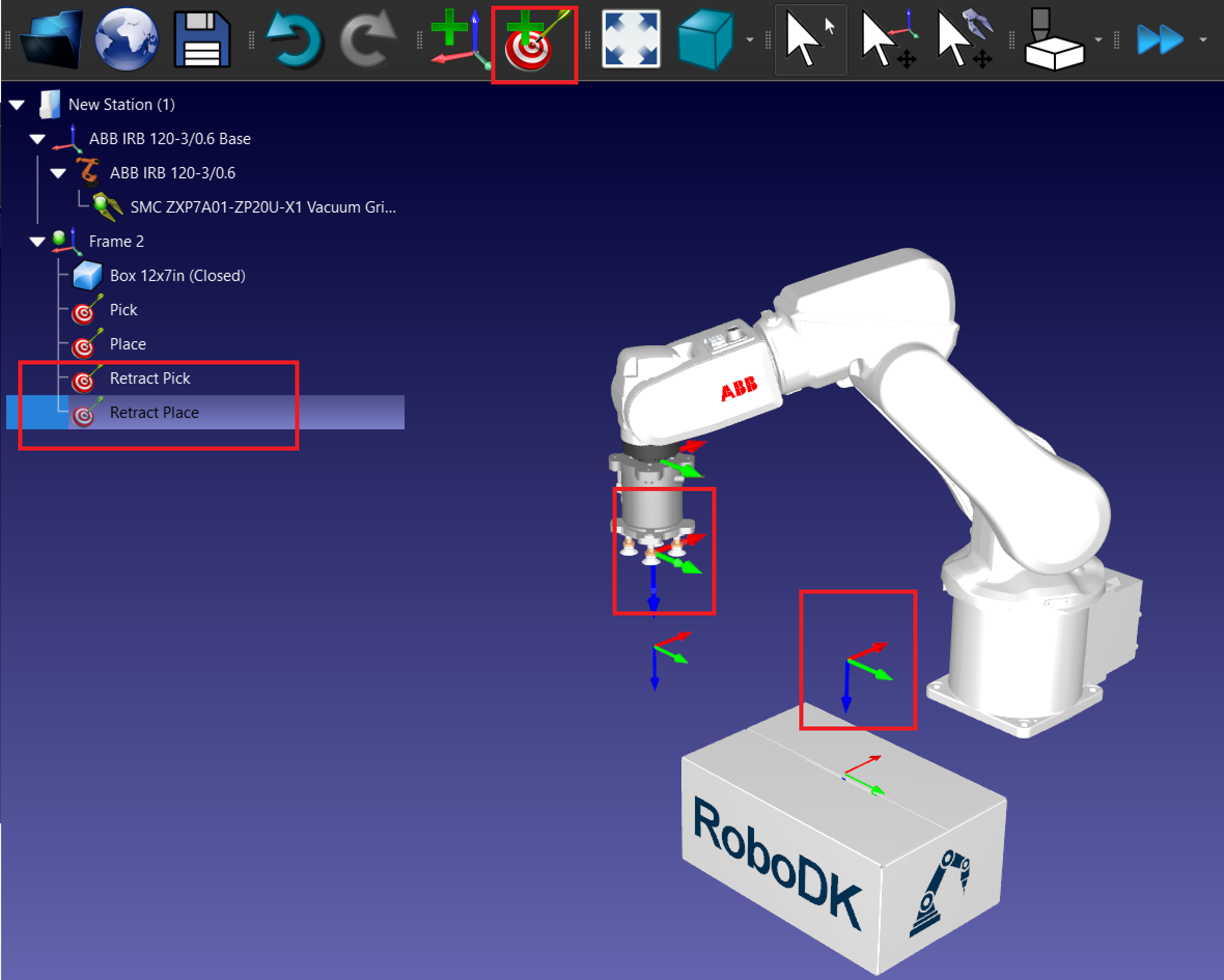
7.Aggiungi bersagli di prelievo e posizionamento:
a.Sposti il robot nella posizione di prelievo desiderata.
b.Selezioni Programma → Insegna bersagli per salvare la posizione.
c.Ripetere per le posizioni Pick, Retract Pick, Place e Retract Place.
8.Organizzi i bersagli:
a.Rinomini i bersagli per chiarezza (ad esempio, Avvicinamento_Pick, Pick, Place). Prema F2 per rinominare i bersagli.
b.Non dimentichi di creare i bersagli nei rispettivi piani di riferimento nell'albero delle stazioni.
9.Creare il bersaglio Pick: Posizioni il robot sopra la scatola e crei un bersaglio chiamato Pick.
10.Crei il bersaglio Posiziona: Sposti il robot nel punto in cui desidera posizionare la scatola e crei un bersaglio chiamato Posiziona.
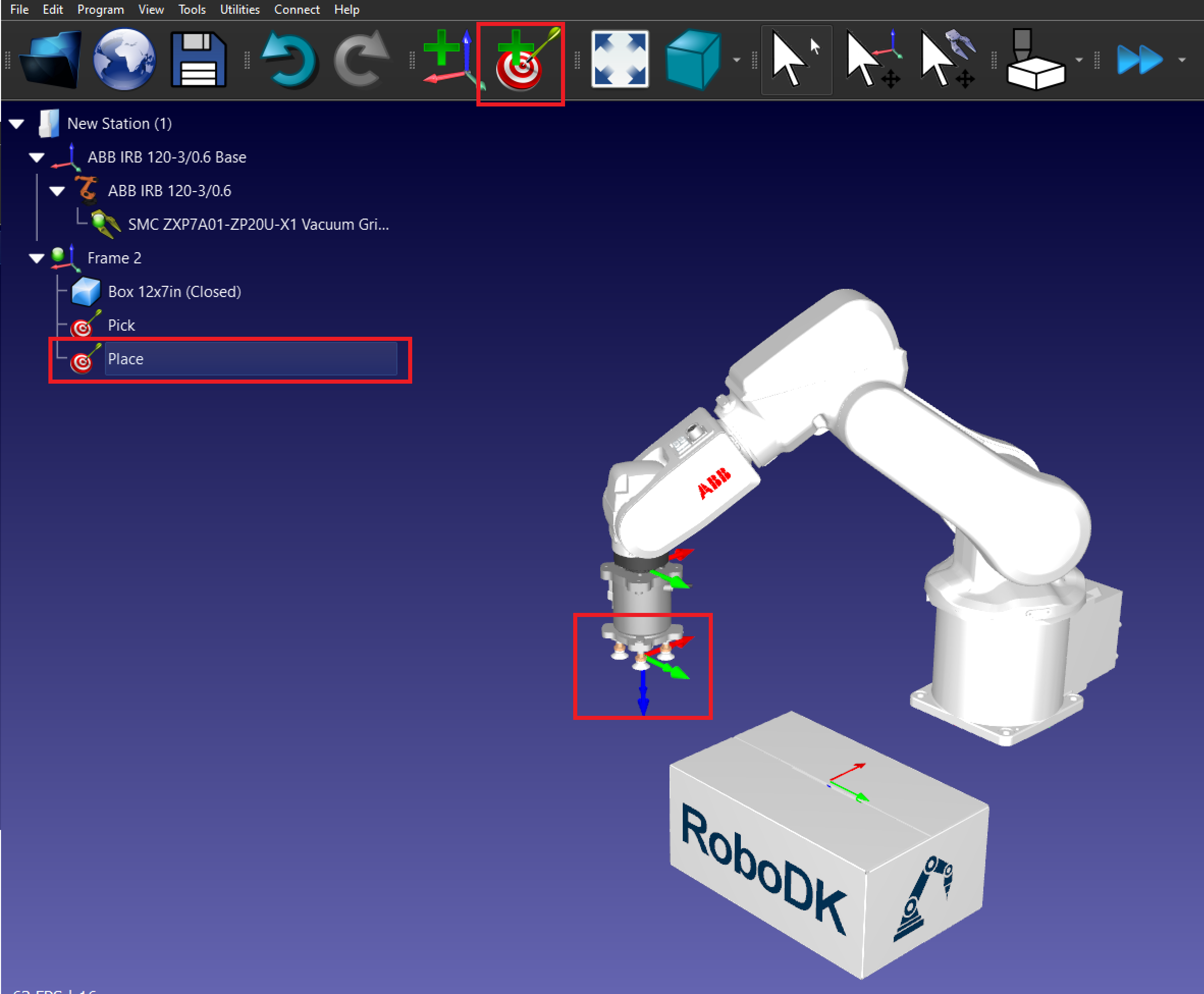
11.Crei i bersagli Ritirata:
a.Sposti il robot verso il bersaglio Pick e verso l'alto sull'asse Z.
b.Crei un nuovo bersaglio chiamato Pick Retract.
c.Ripeta con il bersaglio Place.
Crea un programma di prelievo e posizionamento
Segua questi passaggi per creare un programma di base di pick and place in RoboDK con un braccio robotico a 6 assi che utilizza una pinza a vuoto per spostare una scatola.
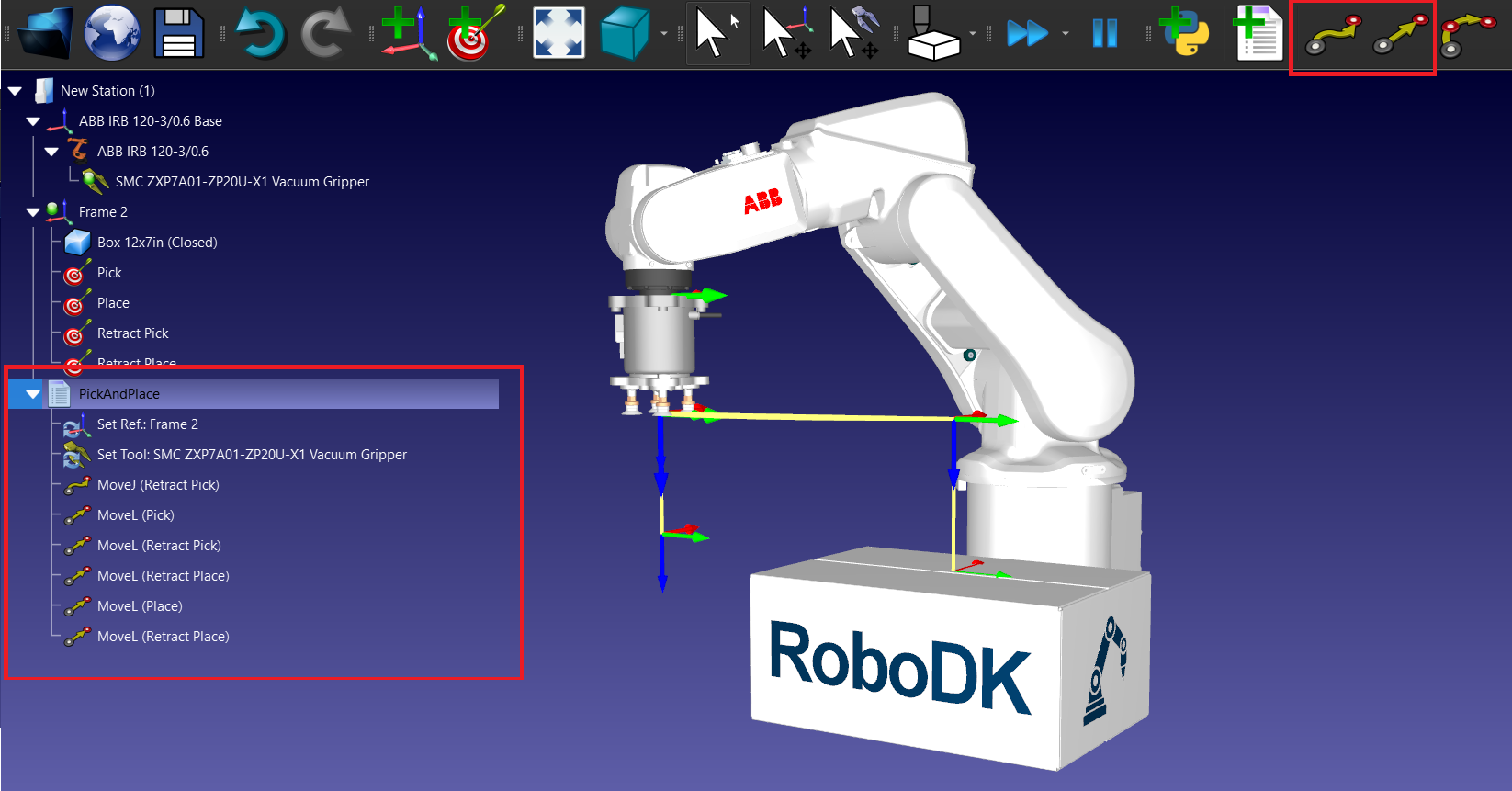
1.Programmare l'operazione di Pick and Place :
a.Crei un nuovo programma: Vada su Programma → Aggiungi programma e lo chiami PickAndPlace.
b.Aggiunga le istruzioni per il movimento:
i.Aggiunga le istruzioni MoveJ o MoveL per ogni bersaglio.
ii.Muova prima il robot verso il bersaglio di ritrazione, quindi crei un MoveL verso il bersaglio Pick e di nuovo verso la ritrazione.
iii.Ripeta con il bersaglio Place.
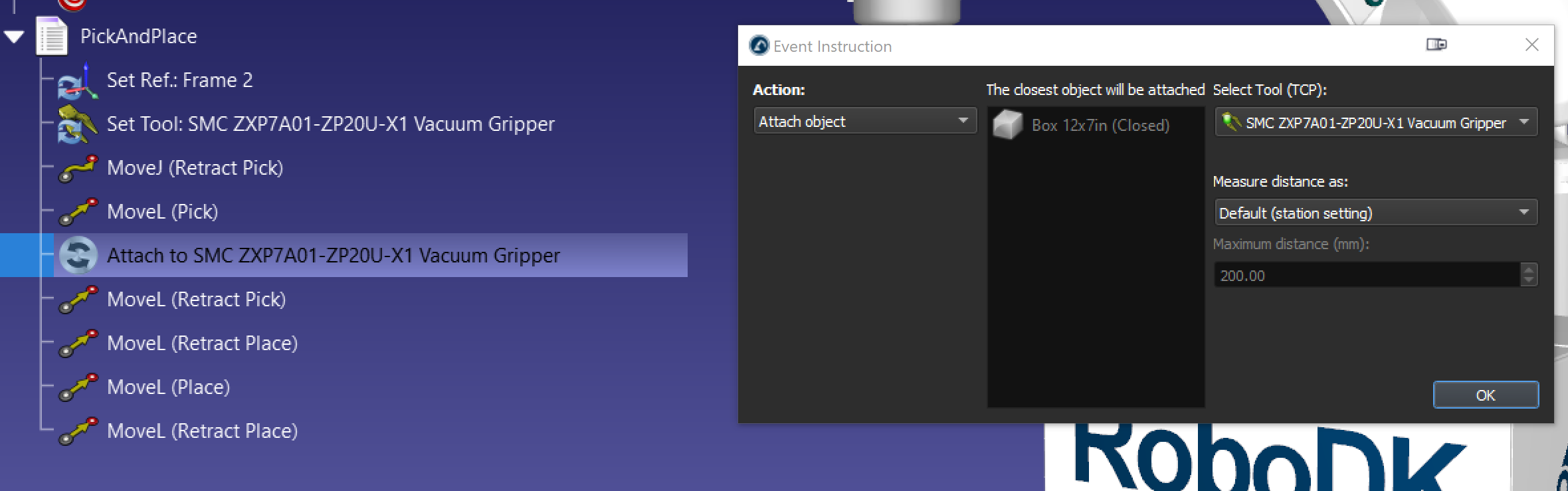
2.Aggiunga l'evento per prelevare e posizionare l'oggetto.
a.Per aggiungere un evento, vada su Programma → Istruzione evento di simulazione.
b.Aggiunga un evento con l'azione Attacca oggetto per prelevare la scatola dopo il MoveL (Pick).
c.Aggiunga un evento con l'azione Stacca l'oggetto posiziona la scatola dopo il MoveL (Posiziona). L'opzione Attacca al genitore consente di attaccare l'oggetto ad un nuovo oggetto una volta che è stato staccato dalla pinza.
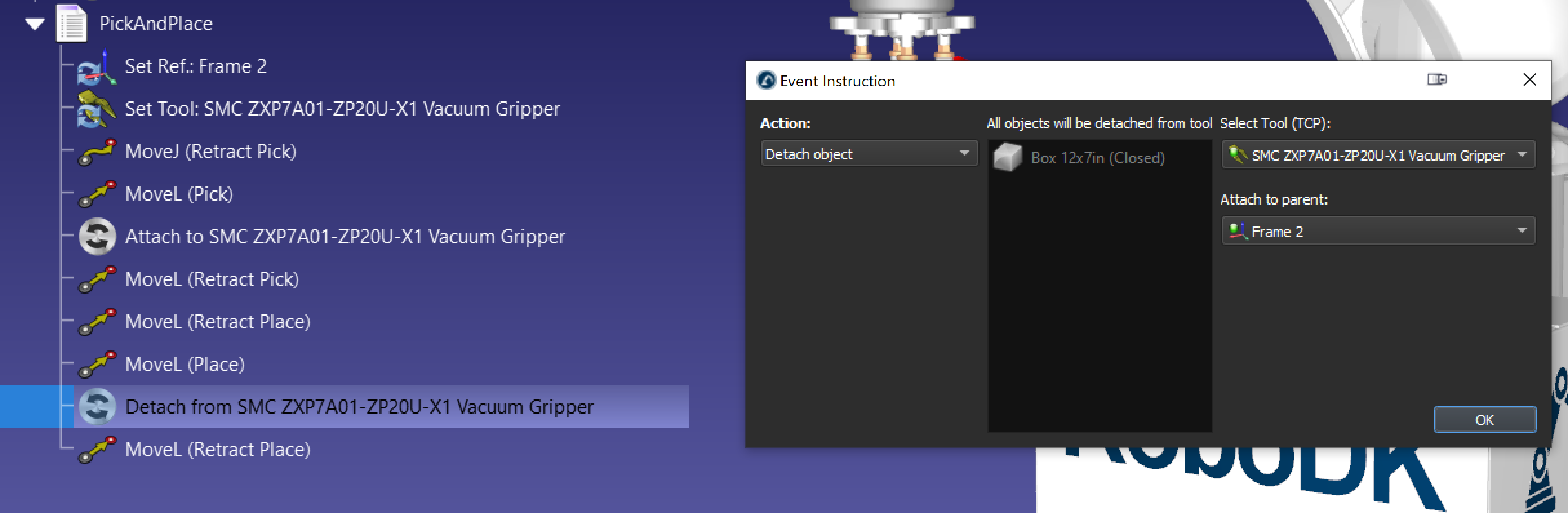
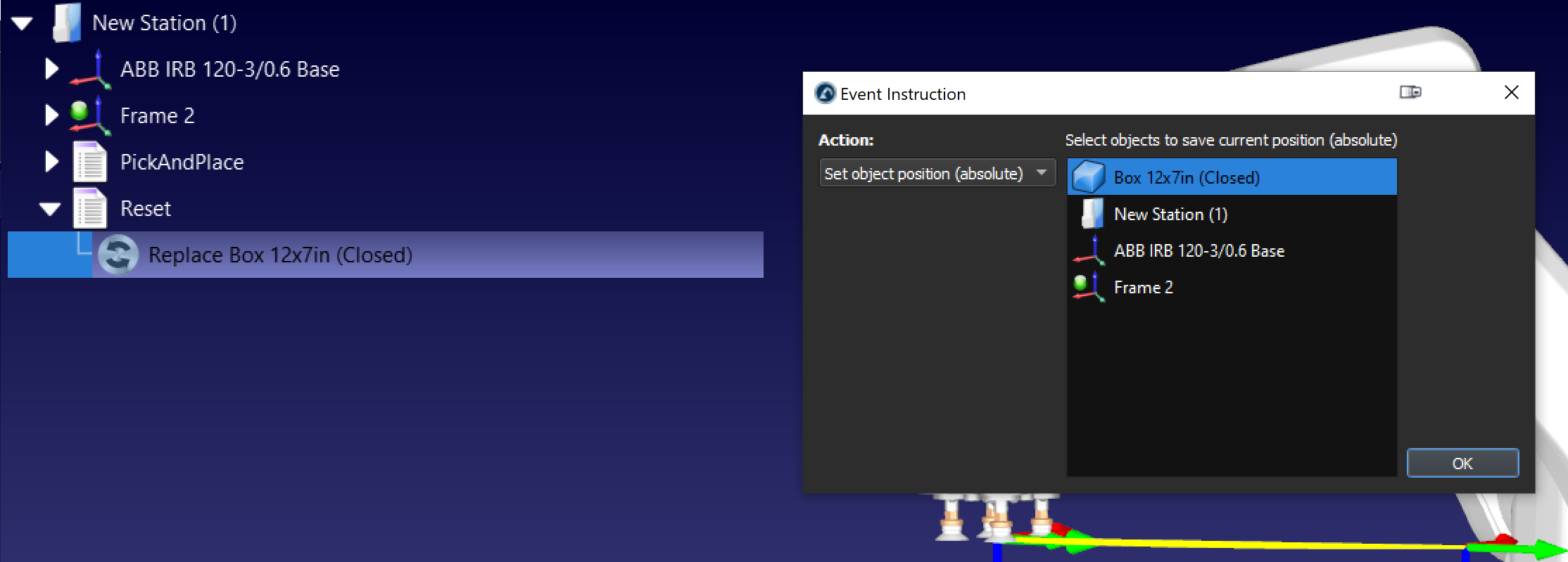
d.È buona norma creare anche un programma separato con un'azione evento Imposta posizione oggetto per riportare il riquadro alla sua posizione di origine, se necessario.
Seguendo questi passaggi, può creare con successo una stazione pick-and-place di base in RoboDK.
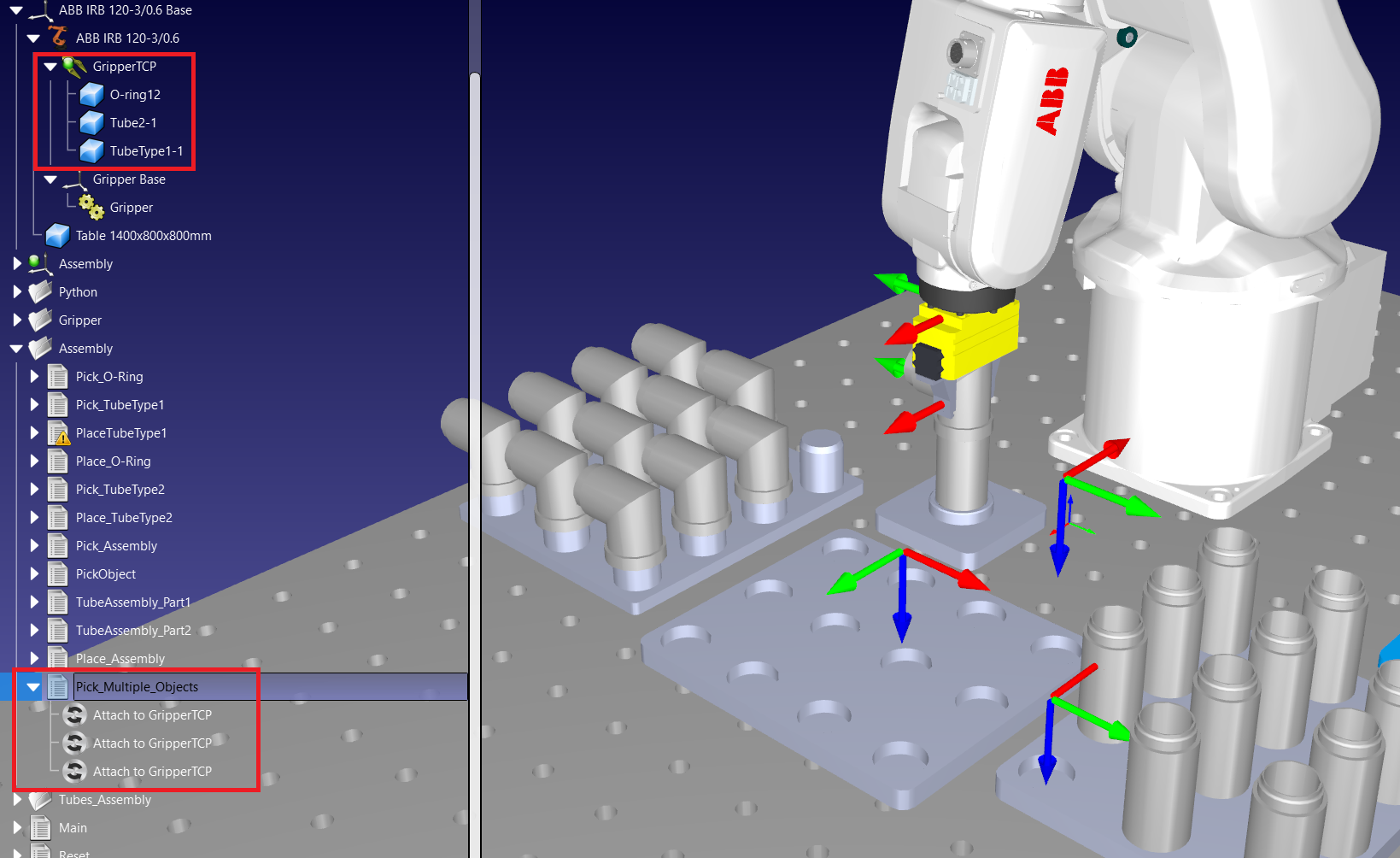
Pick and Place e Assemblaggio
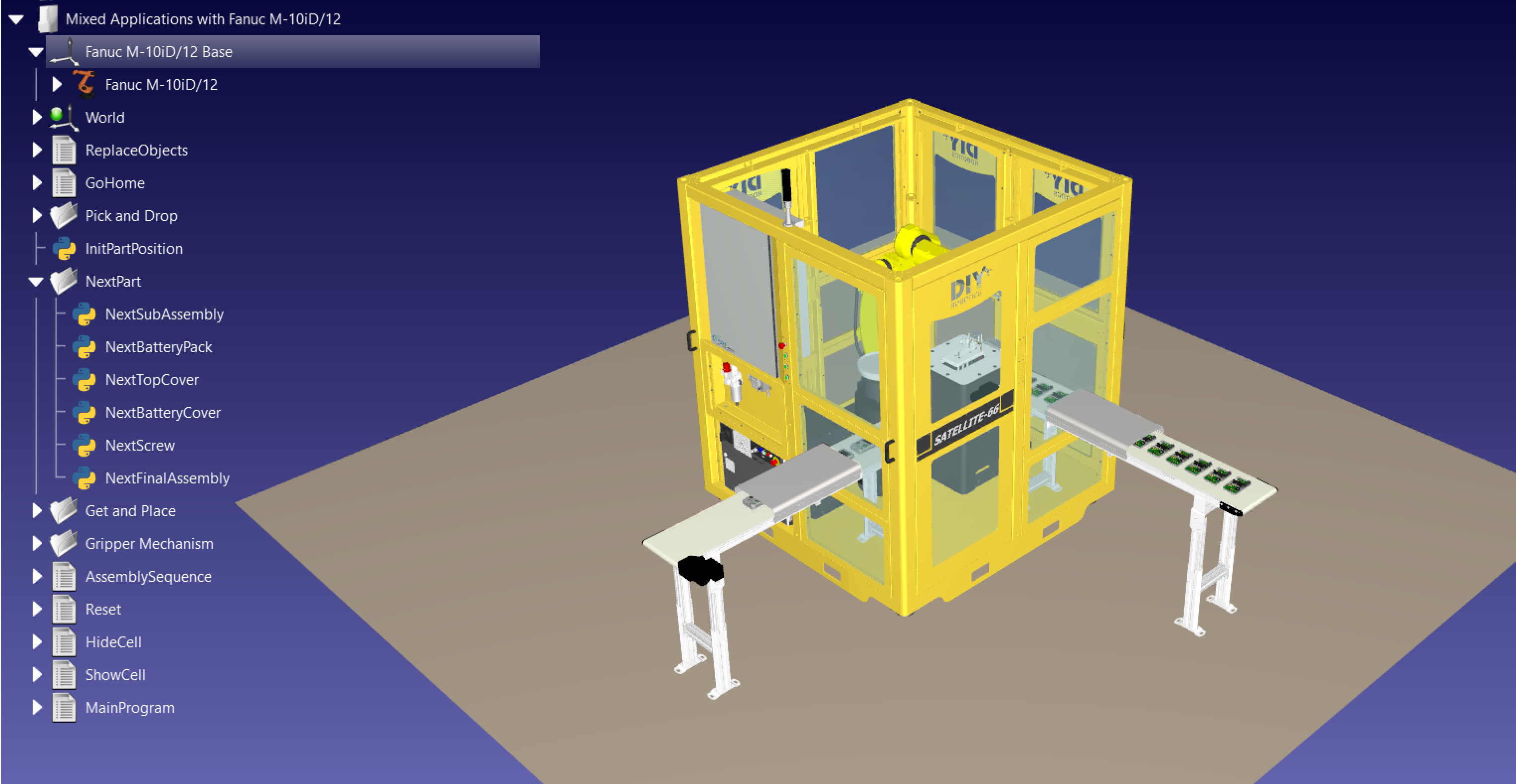
Le applicazioni Pick and Place possono essere utilizzate per automatizzare un'operazione di assemblaggio. Utilizzando più volte l'evento "attacca oggetto", può prelevare più oggetti contemporaneamente e creare un pick-up di assemblaggio. Ad esempio, se ha 3 oggetti nell'assemblaggio, può utilizzare l'evento 3 volte, come mostrato nell'immagine seguente.
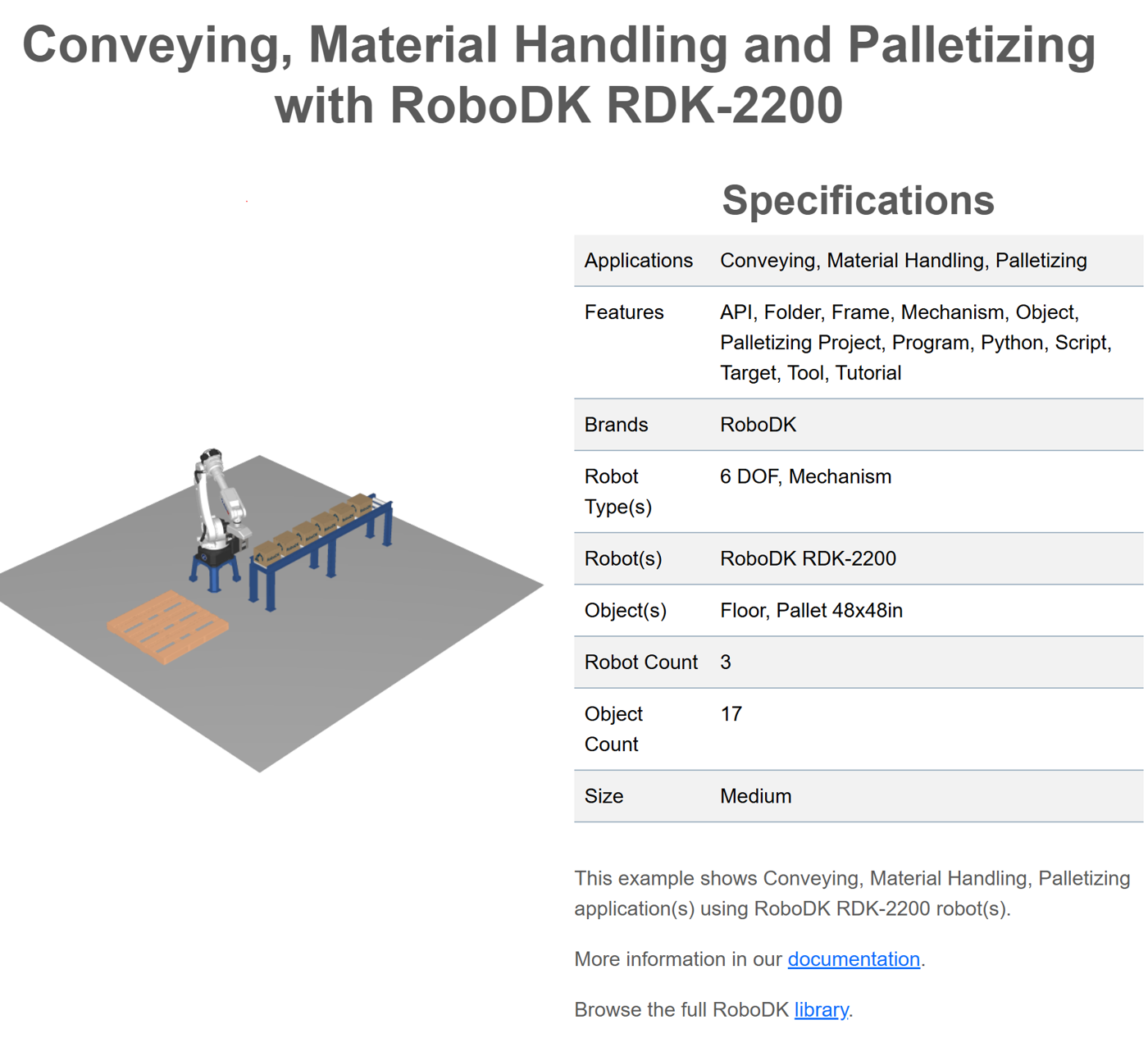
Prelievo e posizionamento con l'Add-in di pallettizzazione
Se ha un'operazione di prelievo e posizionamento ripetitiva che prevede uno schema di pallettizzazione, può utilizzare il nostro plugin di pallettizzazione per semplificare il compito. Utilizzi semplicemente il seguente link e scarichi il nostro plugin di pallettizzazione: Pallettizzazione | Add-in Marketplace. Segua la nostra documentazione sulla pallettizzazione per maggiori informazioni sul plugin di pallettizzazione.
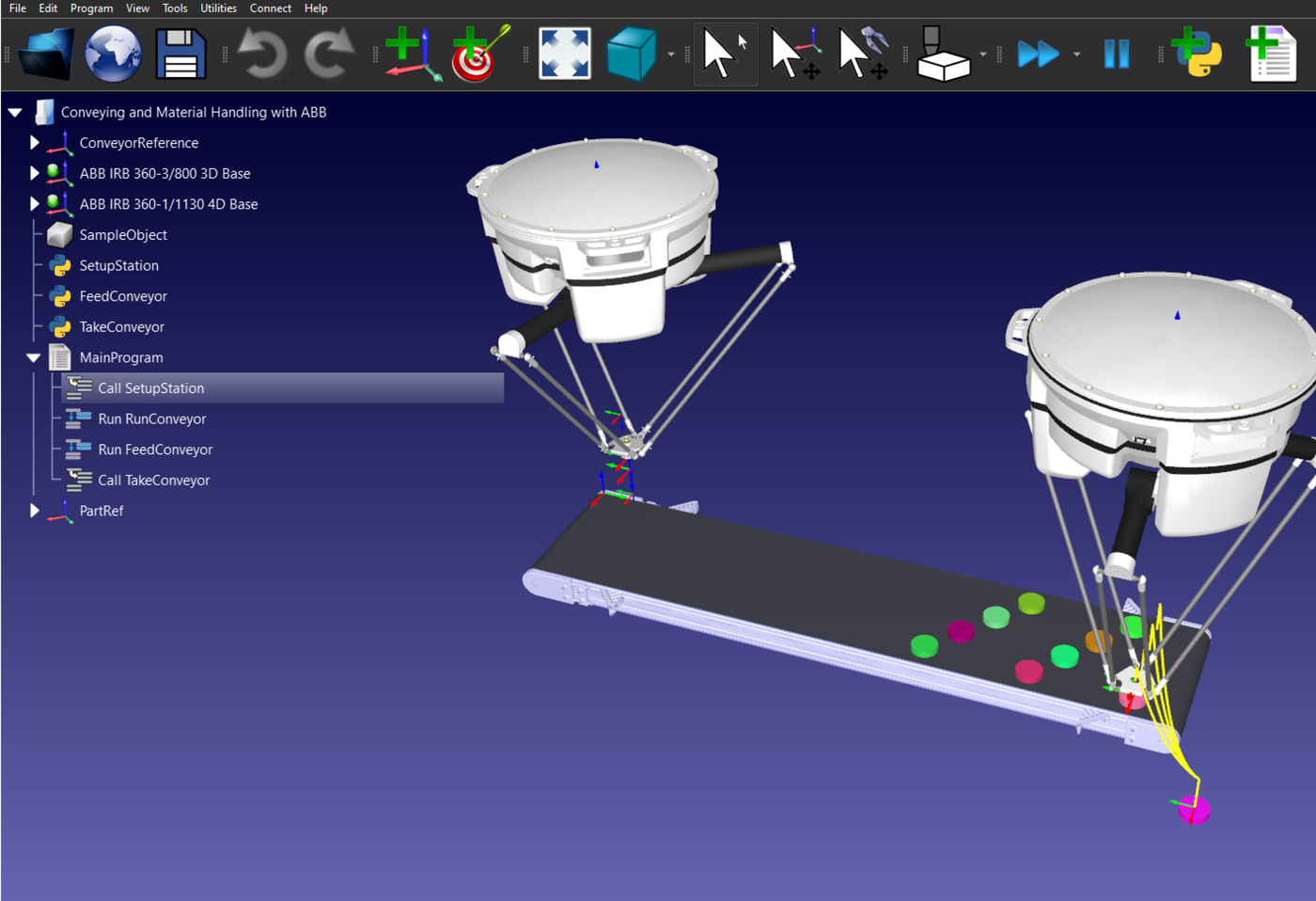
Scegli e posiziona usando l'API
Se ha bisogno di operazioni di pick and place più avanzate, come il prelievo di gruppi di grandi dimensioni o il prelievo di oggetti da un trasportatore in movimento, può utilizzare l'API per programmare le sue applicazioni di pick and place.
Questo esempio utilizza l'API RoboDK con Python per prelevare e posizionare oggetti su un trasportatore in movimento; può scaricarlo dalla nostra libreria.
Può anche dare un'occhiata a questa stazione di assemblaggio che utilizza più parti per creare un assemblaggio finale, utilizzando molte operazioni di pick and place: Applicazioni miste con Fanuc M-10iD/12.