Crea un programma di prelievo e posizionamento
Segua questi passaggi per creare un programma di base di pick and place in RoboDK con un braccio robotico a 6 assi che utilizza una pinza a vuoto per spostare una scatola.
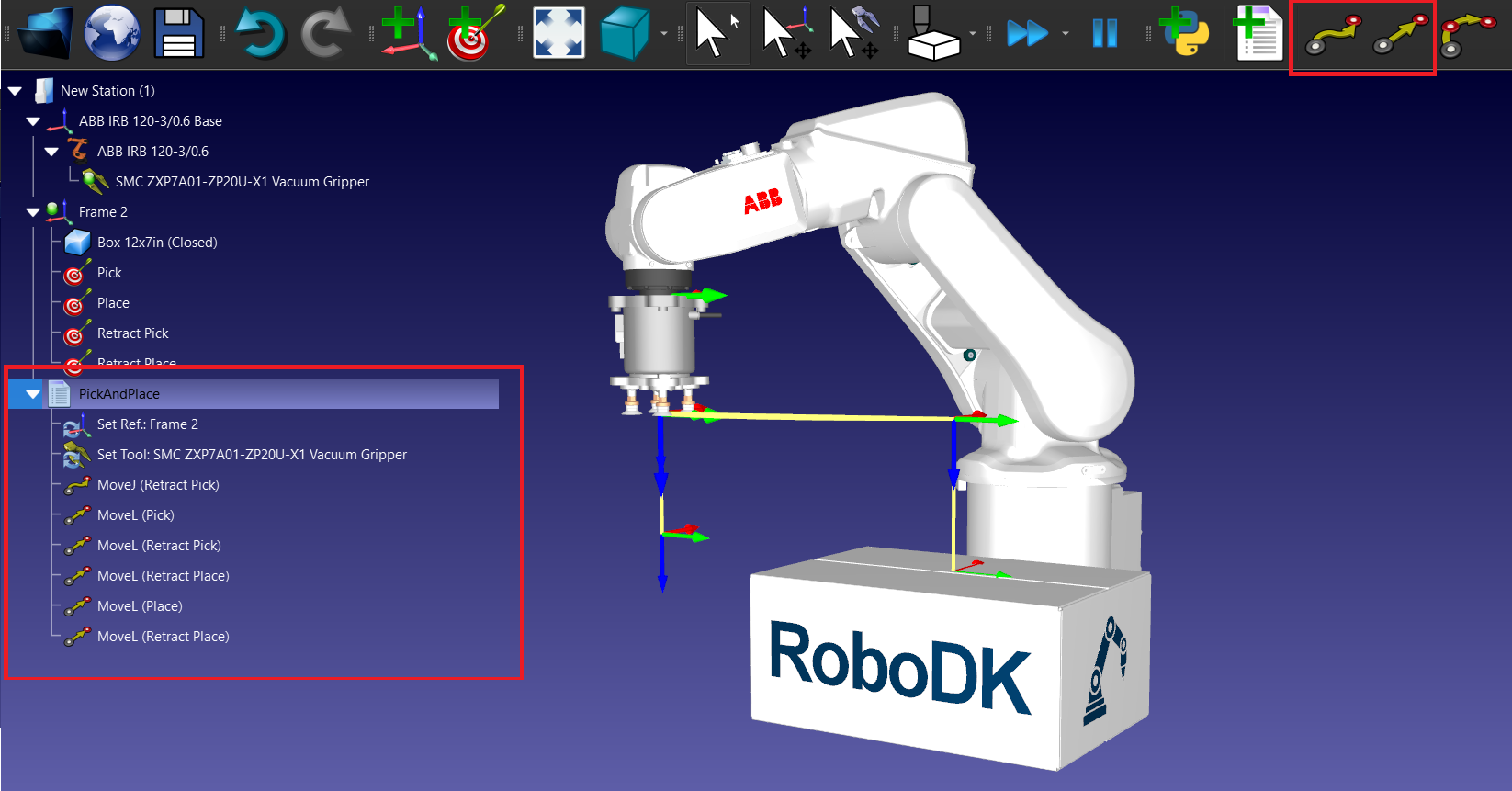
1.Programmare l'operazione di Pick and Place :
a.Crei un nuovo programma: Vada su Programma → Aggiungi programma e lo chiami PickAndPlace.
b.Aggiunga le istruzioni per il movimento:
i.Aggiunga le istruzioni MoveJ o MoveL per ogni bersaglio.
ii.Muova prima il robot verso il bersaglio di ritrazione, quindi crei un MoveL verso il bersaglio Pick e di nuovo verso la ritrazione.
iii.Ripeta con il bersaglio Place.
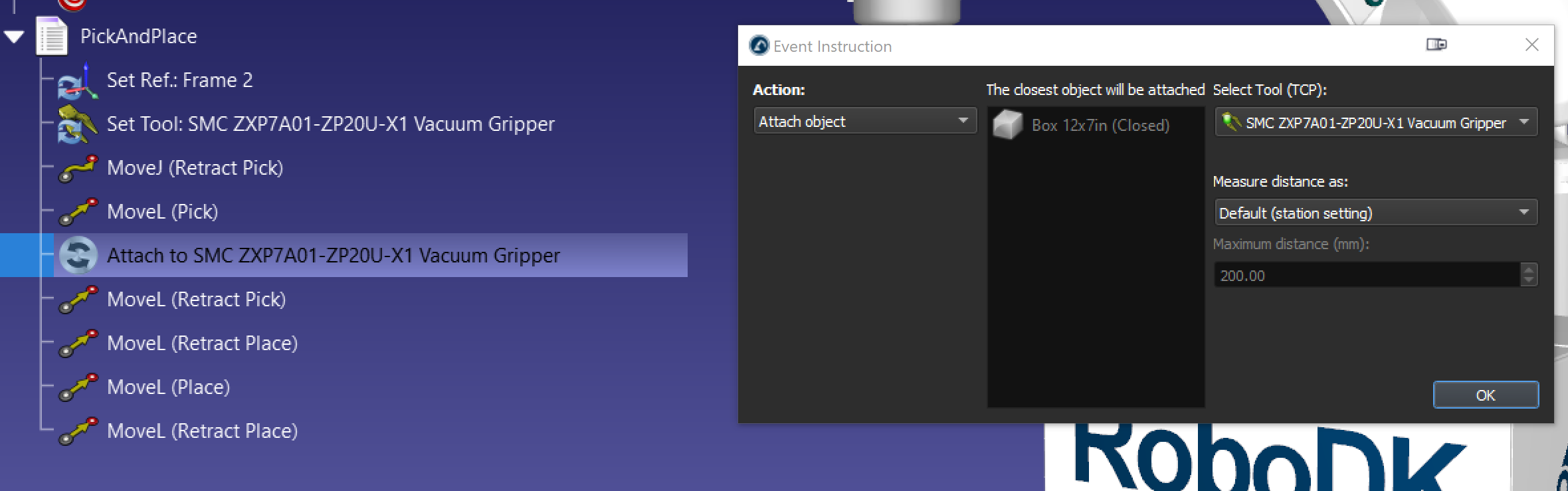
2.Aggiunga l'evento per prelevare e posizionare l'oggetto.
a.Per aggiungere un evento, vada su Programma → Istruzione evento di simulazione.
b.Aggiunga un evento con l'azione Attacca oggetto per prelevare la scatola dopo il MoveL (Pick).
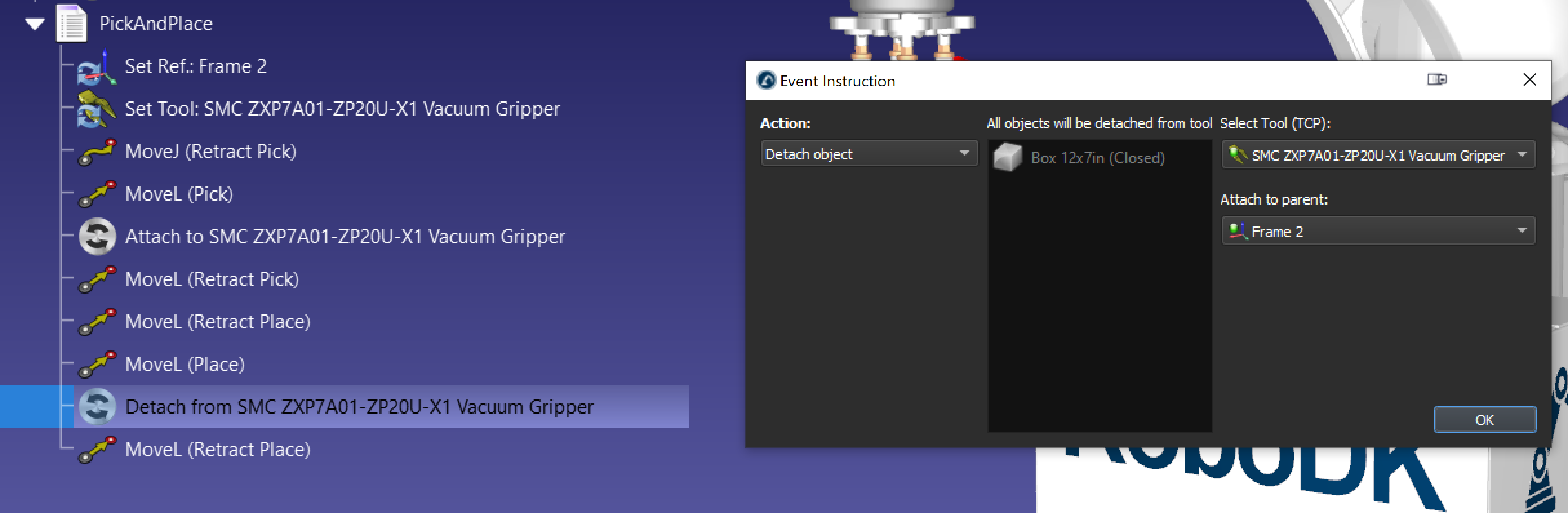
c.Aggiunga un evento con l'azione Stacca l'oggetto posiziona la scatola dopo il MoveL (Posiziona). L'opzione Attacca al genitore consente di attaccare l'oggetto ad un nuovo oggetto una volta che è stato staccato dalla pinza.
d.È buona norma creare anche un programma separato con un'azione evento Imposta posizione oggetto per riportare il riquadro alla sua posizione di origine, se necessario.
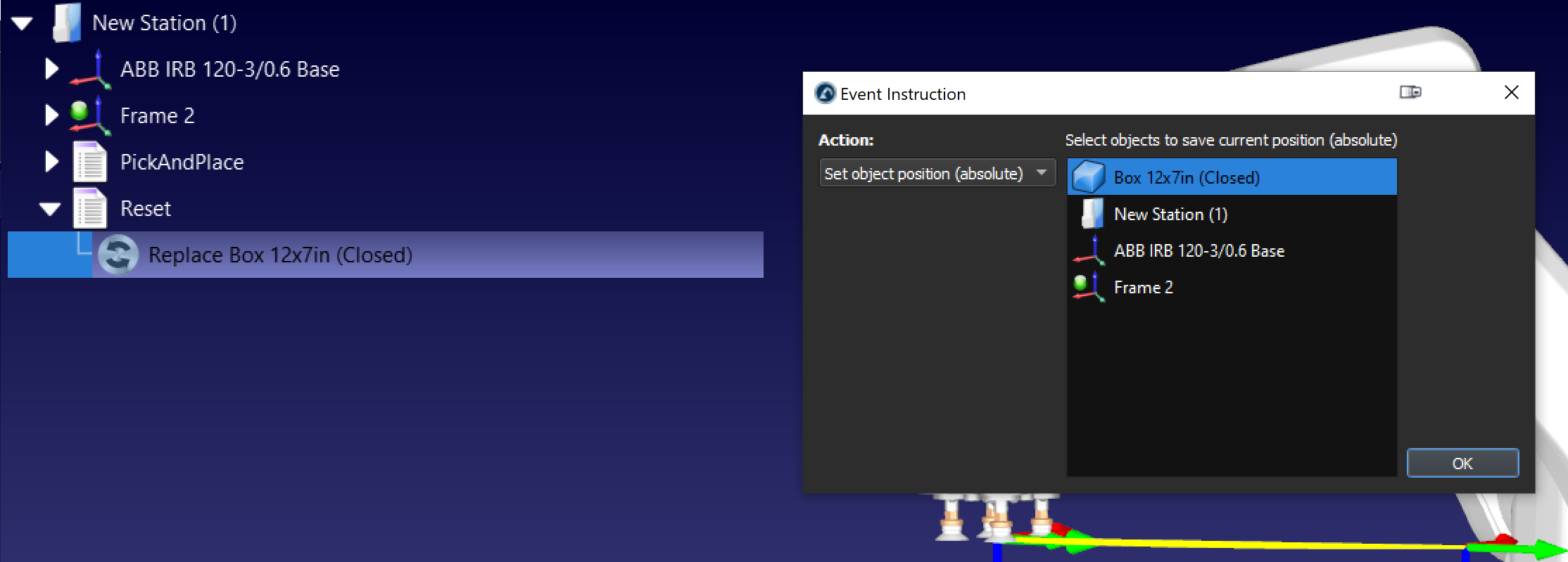
Seguendo questi passaggi, può creare con successo una stazione pick-and-place di base in RoboDK.