Creare bersagli per il Pick and Place
Segua questi passaggi per creare un bersaglio di base in RoboDK per un'applicazione di pick and place.
7.Aggiungi bersagli di prelievo e posizionamento:
a.Sposti il robot nella posizione di prelievo desiderata.
b.Selezioni Programma → Insegna bersagli per salvare la posizione.
c.Ripetere per le posizioni Pick, Retract Pick, Place e Retract Place.
8.Organizzi i bersagli:
a.Rinomini i bersagli per chiarezza (ad esempio, Avvicinamento_Pick, Pick, Place). Prema F2 per rinominare i bersagli.
b.Non dimentichi di creare i bersagli nei rispettivi piani di riferimento nell'albero delle stazioni.
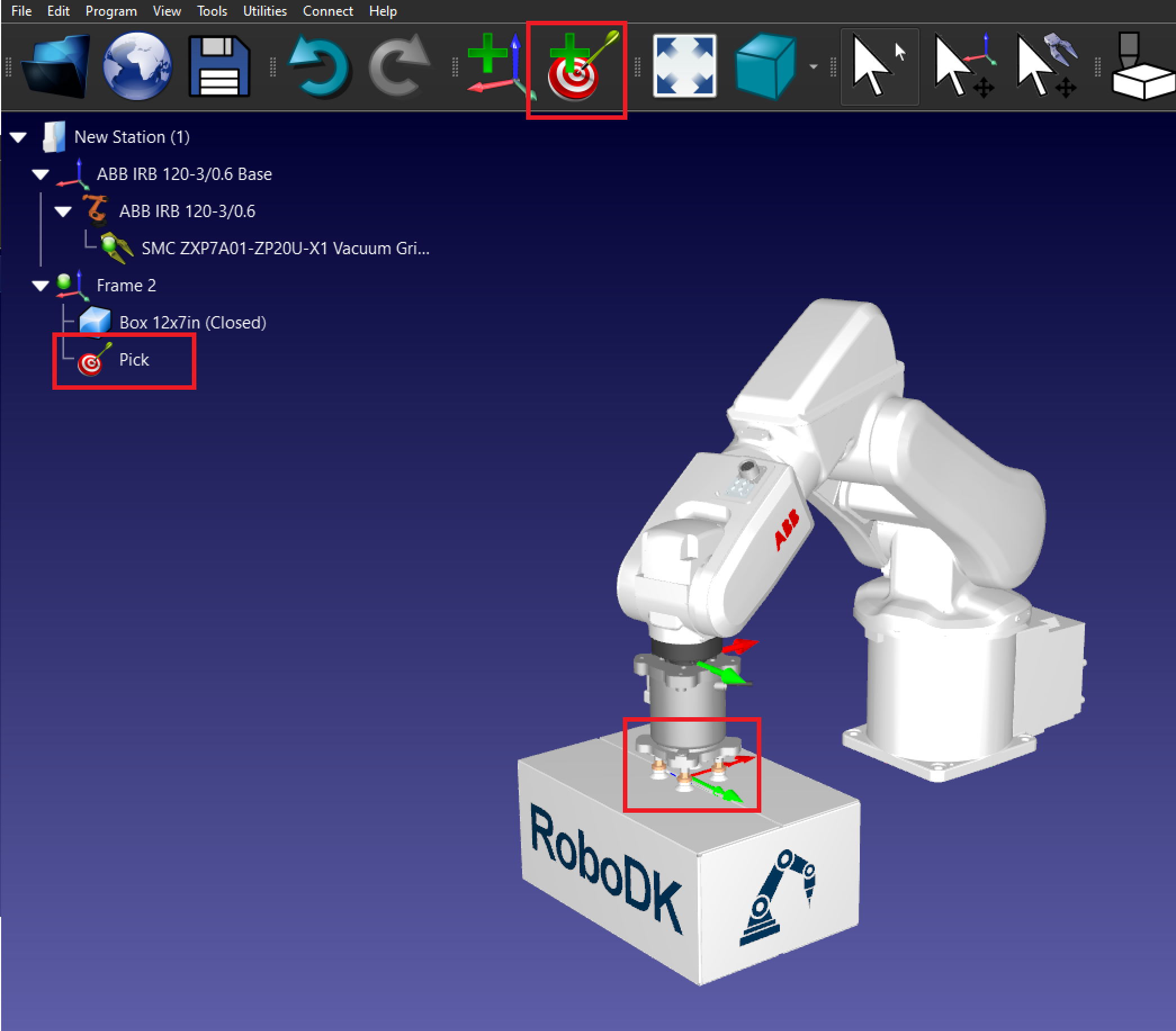
9.Creare il bersaglio Pick: Posizioni il robot sopra la scatola e crei un bersaglio chiamato Pick.
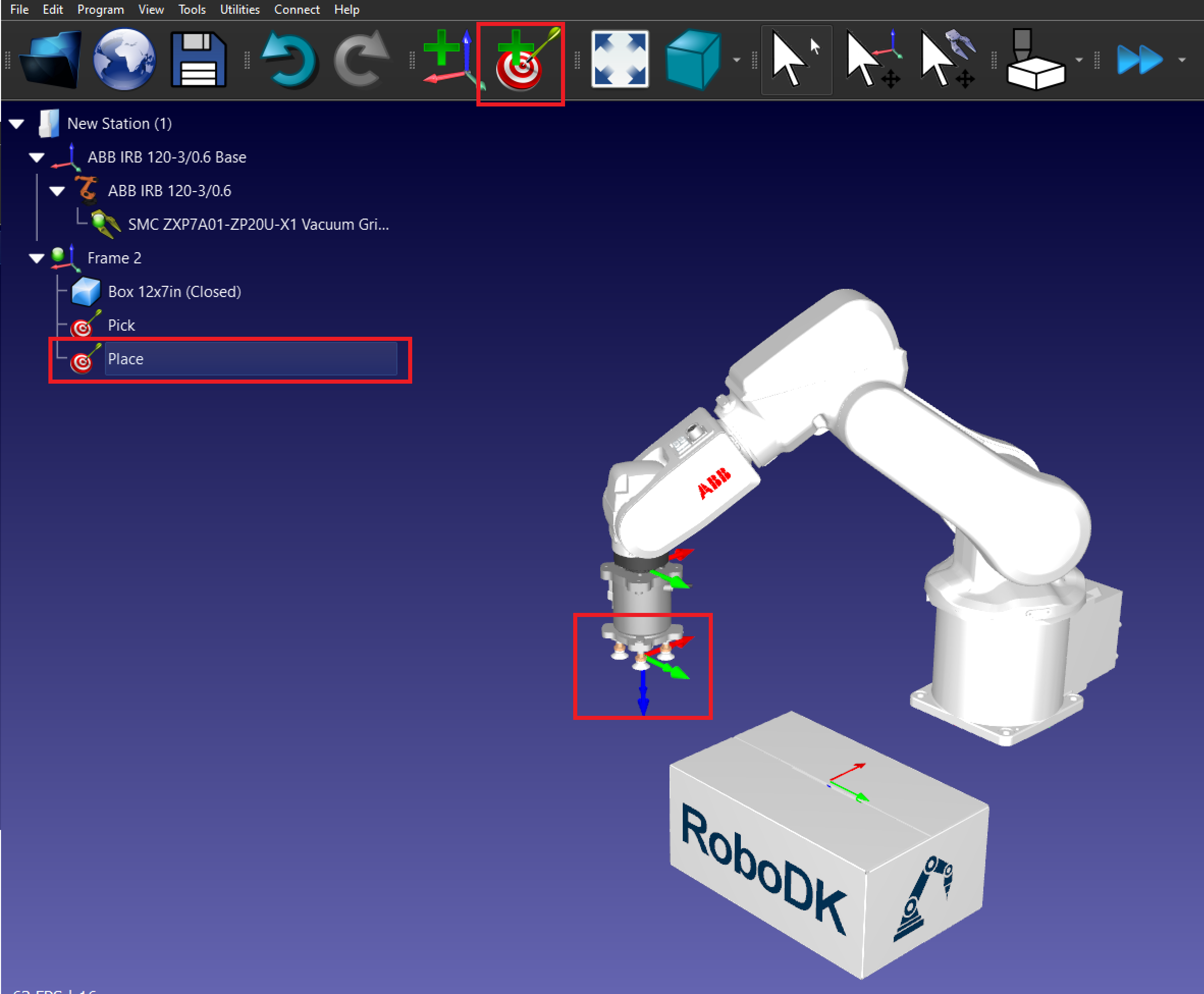
10.Crei il bersaglio Posiziona: Sposti il robot nel punto in cui desidera posizionare la scatola e crei un bersaglio chiamato Posiziona.
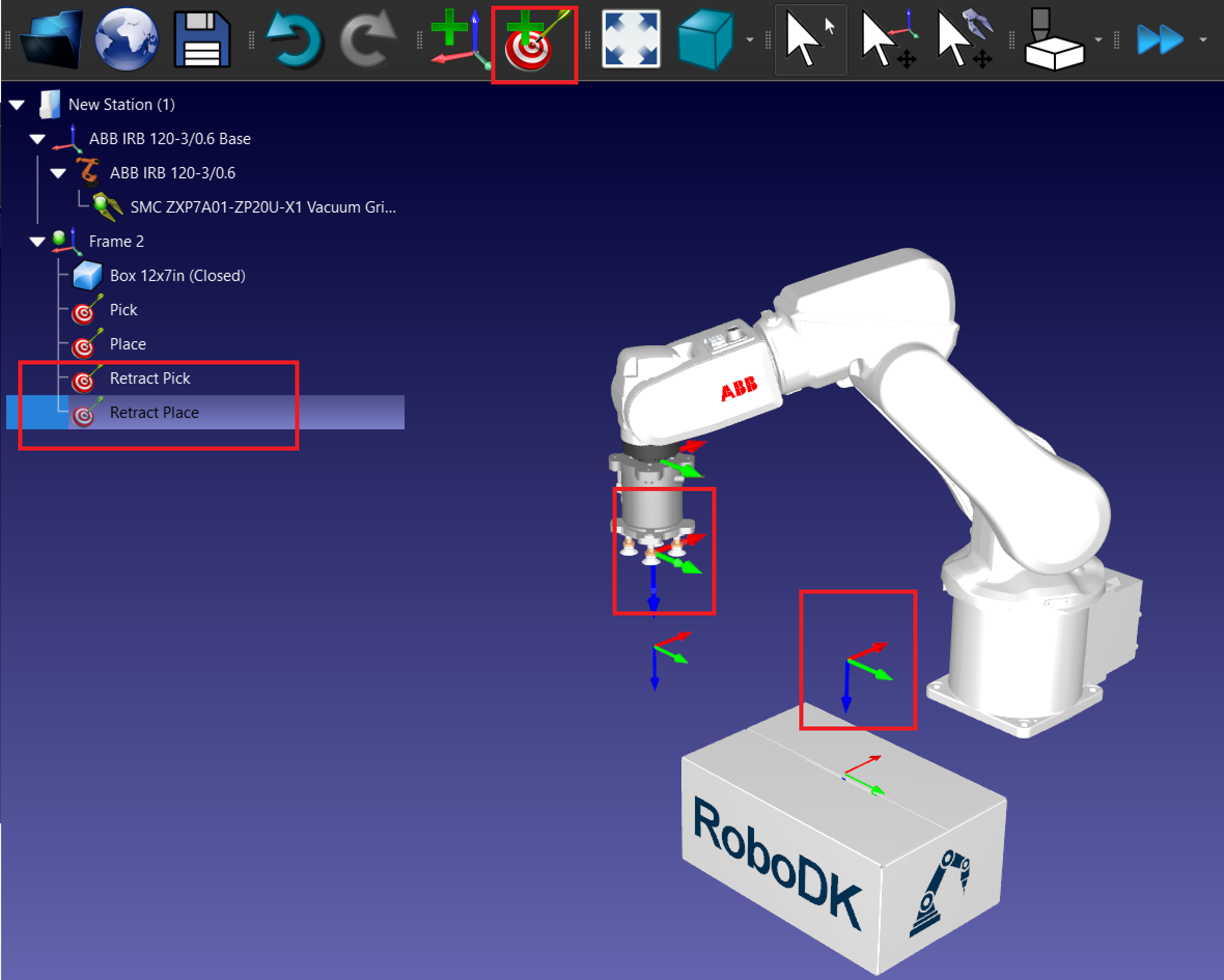
11.Crei i bersagli Ritirata:
a.Sposti il robot verso il bersaglio Pick e verso l'alto sull'asse Z.
b.Crei un nuovo bersaglio chiamato Pick Retract.
c.Ripeta con il bersaglio Place.