Creare un nuovo progetto RoboDK
Questi passaggi le mostreranno come creare un nuovo progetto (noto anche come stazione) in RoboDK per un'applicazione di pick and place.
1.Aprire RoboDK: avviare l'applicazione RoboDK sul suo computer.
2.Crei una nuova stazione: Selezioni File-Nuova stazione dal menu principale di RoboDK: verrà creata una nuova stazione vuota come spazio di lavoro.
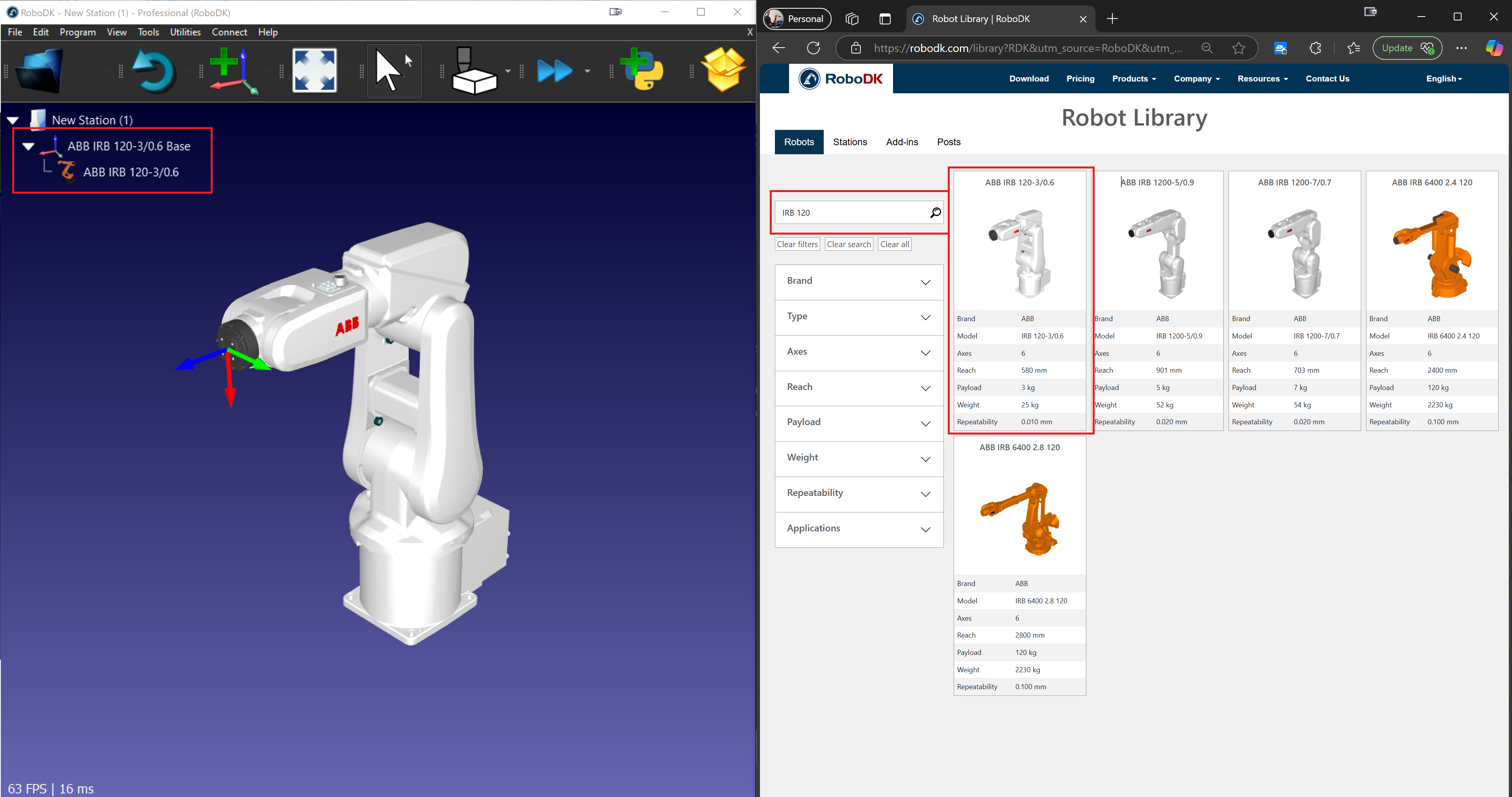
3.Aggiungere un robot dalla Biblioteca
a.Apra la libreria di robot online per scaricare un robot
i.Nel menu principale, selezioni File → Apri libreria online.
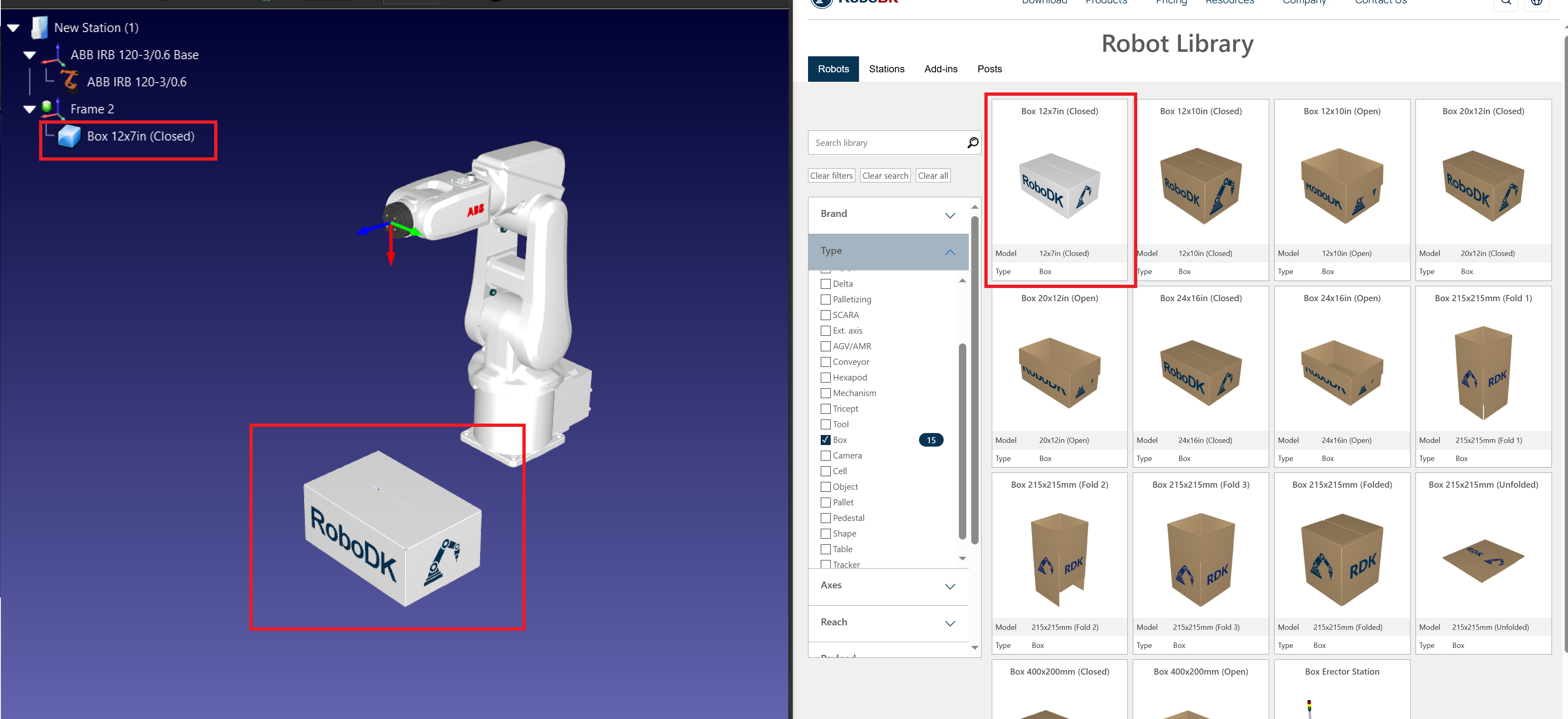
ii.Si aprirà la finestra Libreria RoboDK, che mostra una serie di robot industriali.
b.Selezionare e importare un robot:
i.Utilizzi la barra di ricerca per trovare un robot adatto ai compiti di pick-and-place (ad esempio, UR10, ABB IRB 120, Fanuc LR Mate).
ii.Clicchi sul robot desiderato e selezioni Download.
c.Posizionare il robot nella stazione:
i.Il robot apparirà automaticamente nella stazione.
ii.Utilizzi lo strumento Sposta per regolare il suo posizionamento, se necessario.
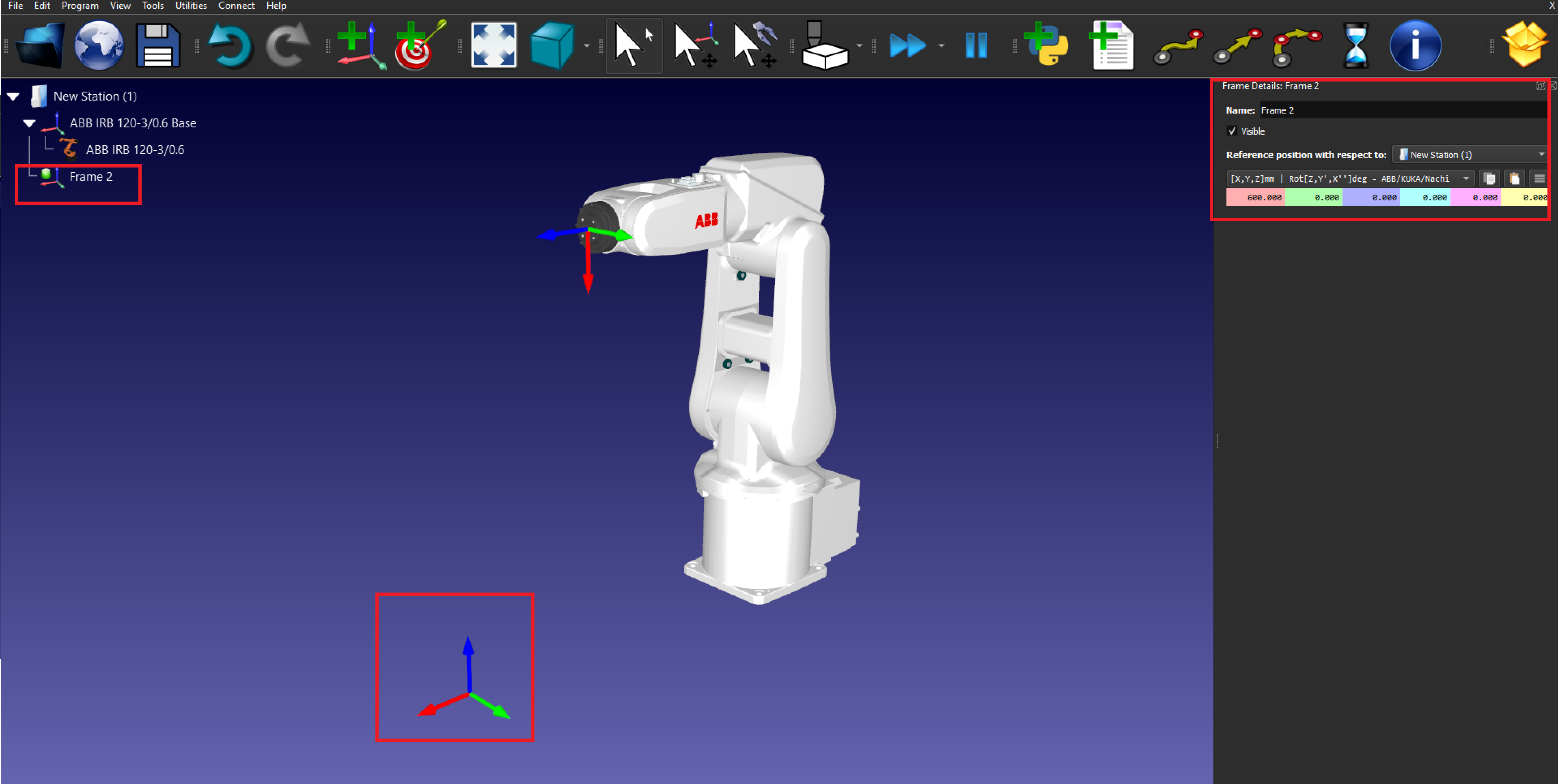
4.Aggiunga un piano di riferimento.
a.Creare un Piano di riferimento:
i.Vada su Programma → Aggiungi piano di riferimento.
ii.Un nuovo piano di riferimento apparirà nella struttura della stazione e nella vista 3D.
b.Posizionare il Piano di riferimento:
i.Clicchi due volte sul piano di riferimento per inserire le coordinate (X, Y, Z) e i valori di rotazione.
ii.Clicchi su OK per salvare la posizione.
5.Importazione di oggetti 3D
a.Caricare i modelli di oggetti:
iii.Nel menu principale, selezioni File → Apri.
iv.Sfoglia e seleziona i modelli 3D degli oggetti da prelevare e posizionare (ad esempio, file STEP, IGES).
b.Posizionare gli oggetti:
v.Utilizzi lo Strumento Sposta per regolare la posizione dell'oggetto nei piani di riferimento.
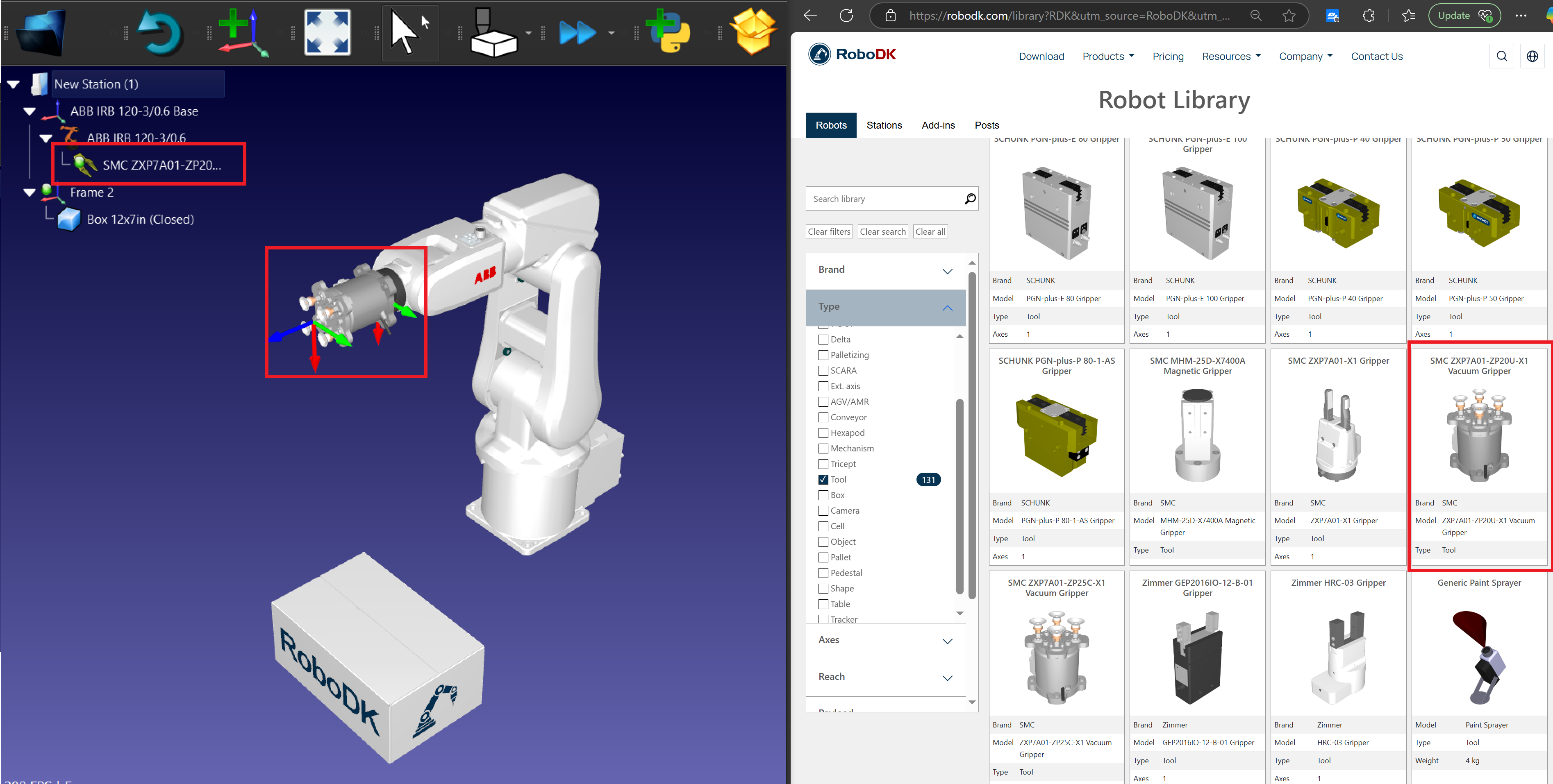
6.Aggiungere un utensile (pinza)
a.Selezionare una pinza:
i.Nel menu principale, vada su Utilità → Aggiungi strumento (TCP).
ii.Scegliere una pinza dalla Libreria Robot o importare un file di pinza personalizzato.
b.Collegare l'utensile al robot:
i.Fare clic con il pulsante destro del mouse sulla pinza nella struttura delle stazioni e selezionare Attacca al robot.
ii.Scelga la flangia del robot appropriata.
c.Definisca il TCP (Punto Centrale Utensile): Clicchi due volte sull'utensile e inserisca le coordinate TCP rispetto alla flangia del robot.