Scegli e posiziona usando l'API
Se ha bisogno di operazioni di pick and place più avanzate, come il prelievo di gruppi di grandi dimensioni o il prelievo di oggetti da un trasportatore in movimento, può utilizzare l'API per programmare le sue applicazioni di pick and place.
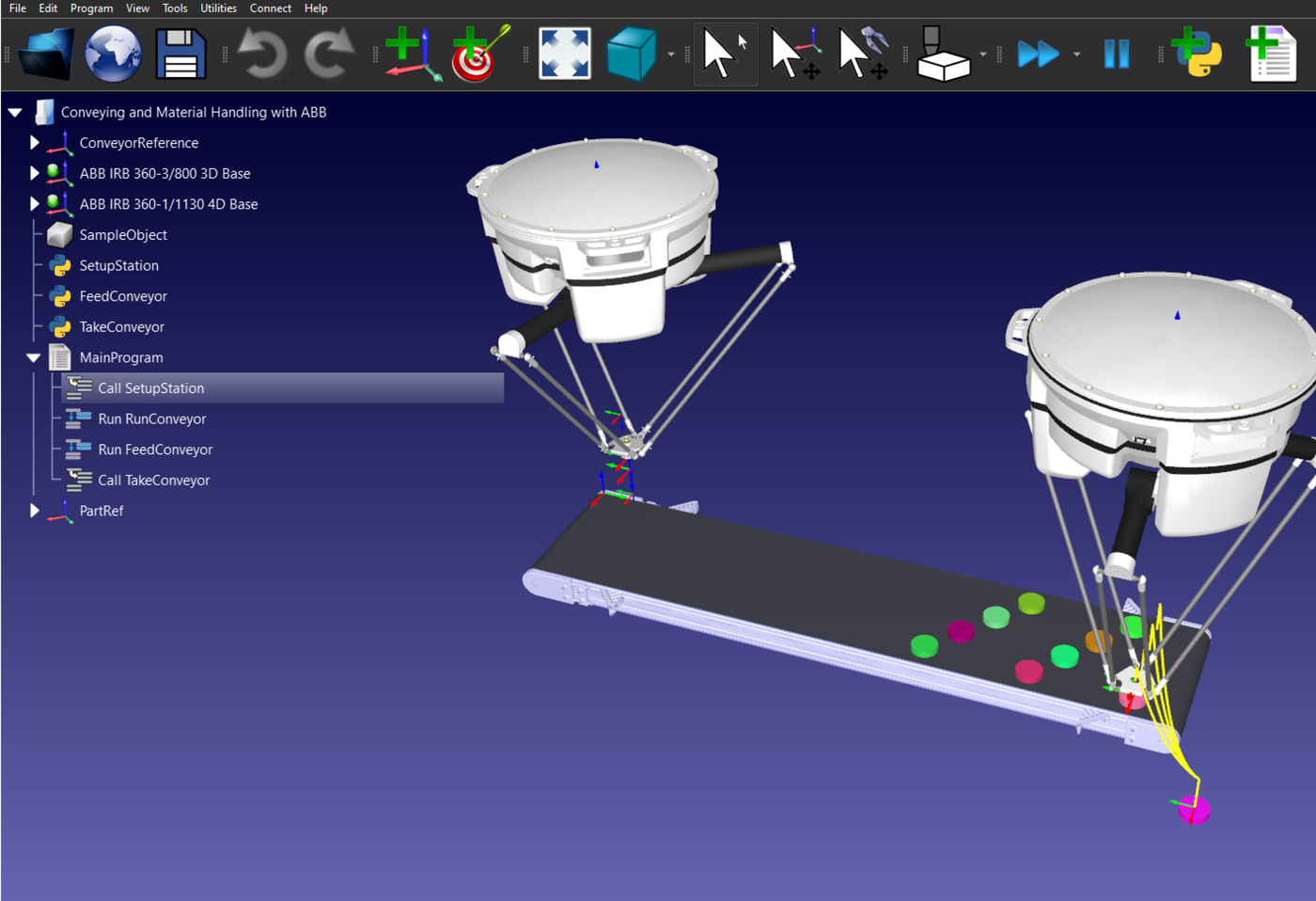
Questo esempio utilizza l'API RoboDK con Python per prelevare e posizionare oggetti su un trasportatore in movimento; può scaricarlo dalla nostra libreria.
Suggerimento: può trovare maggiori informazioni sull'API RoboDK qui.
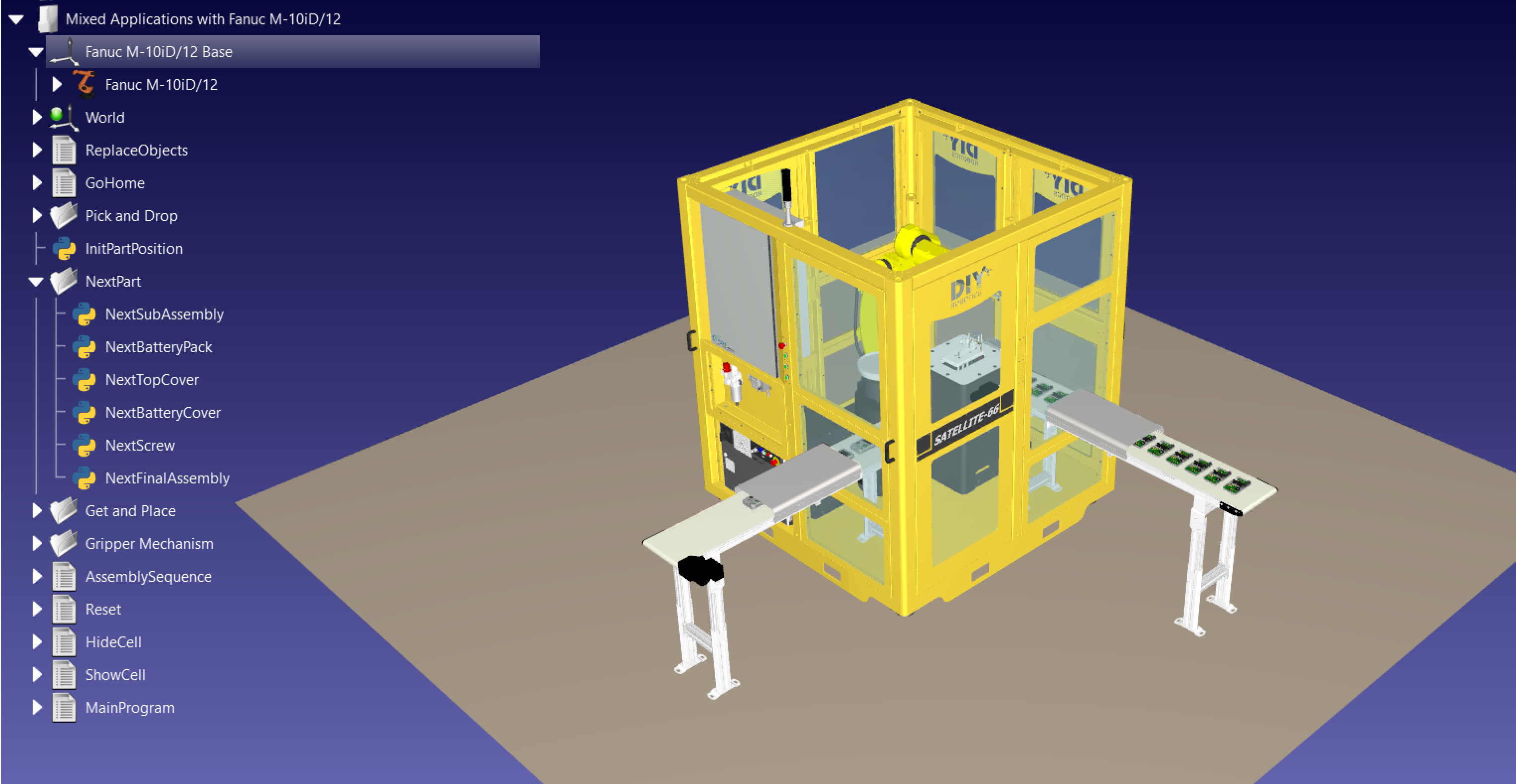
Può anche dare un'occhiata a questa stazione di assemblaggio che utilizza più parti per creare un assemblaggio finale, utilizzando molte operazioni di pick and place: Applicazioni miste con Fanuc M-10iD/12.