Impostazione
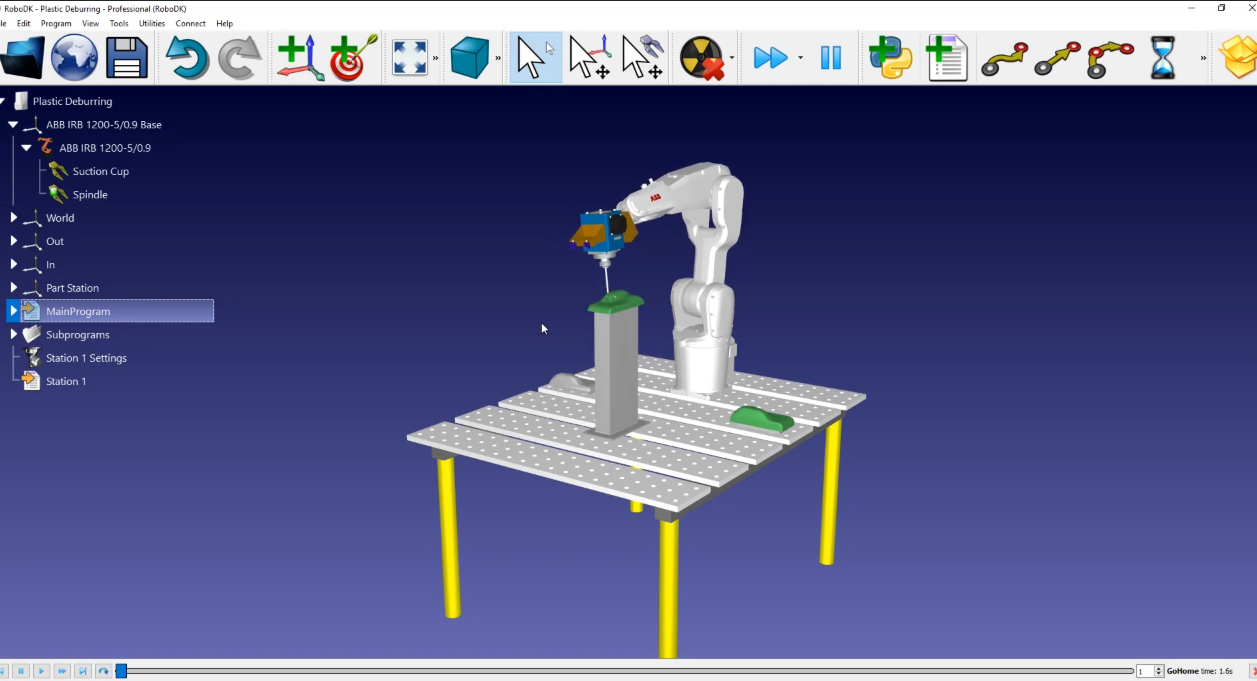
Questo esempio utilizza una configurazione semplice: Un robot montato su un tavolo (questo esempio include un robot ABB), una pila per il pezzo appena stampato, una pila per quello lavorato e la dima al centro per tenere il pezzo in posizione
Suggerimento: Segua questa guida per imparare a creare una stazione robotica passo dopo passo in RoboDK.
Caricare la stazione:
1.Selezionare File ➔
2.Individui l'esempio di Sbavatura plastica nella sezione esempi di RoboDK:
C:/RoboDK/Examples/Plugin-Fusion360-Plastic-Deburring.rdk.
Dopo aver caricato la stazione, può aprire Fusion 360.