Stazione RoboDK
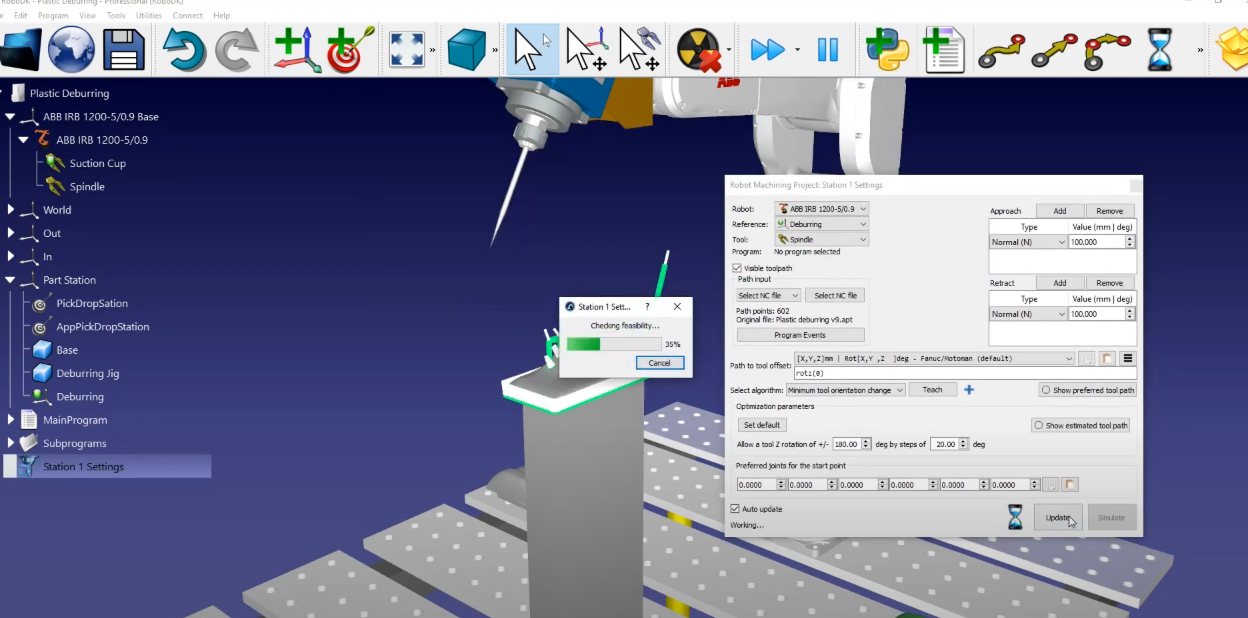
Una volta preparato il percorso utensile del robot in RoboDK, dobbiamo assicurarci che la cella del robot virtuale corrisponda alla configurazione reale. In RoboDK ci assicuriamo di utilizzare l'utensile e il quadro di riferimento corretti per l'operazione di produzione, prima di generare il programma del robot.
In questo esempio abbiamo selezionato il riferimento Sbavatura e l'utensile come Mandrino. Selezioni Aggiornamento➔ Simulazione.
Se desidera riordinare o cambiare il senso di una sezione di percorso, segua questi passaggi:
1.I progetti CAM di solito sono già dotati di movimenti di avvicinamento e ritrazione, quindi possiamo rimuovere i nostri: Basta andare su "Avvicinamento" e "Ritrazione" e selezionare Rimuovi. Selezionare Aggiorna e poi Simula.
2.In questo esempio, i parametri predefiniti producono un risultato valido. L'unica impostazione aggiuntiva che potremmo voler modificare è l'attivazione e la disattivazione del mandrino: Aprire il programma Eventi➔ Aggiungere una subroutine in "Avvicinamento al percorso" e "Ritrazione del percorso" spuntando ogni opzione e scrivere "Mandrino (1)" in Avvicinamento al percorso e "Mandrino (0)" in Ritrazione del percorso. Questo presuppone che sia stata definita una funzione nel controllore che possa accettare un parametro per attivare o disattivare il mandrino.
3.Selezionare Aggiornamento.
Ora dobbiamo modificare il nome del programma che abbiamo creato "Stazione 1" e lanciare il "Programma principale".
L'ultima cosa da fare è generare il programma del robot. Poiché stiamo usando un robot ABB, dovremo esportare un file mod per il controller del robot ABB che utilizza il linguaggio di programmazione RAPID, di proprietà di ABB.
1.Si assicuri di utilizzare il post processor corretto: Selezioni la stazione➔ Selezioni il post-processor➔ ABB RAPID IRC 5.
2.Cliccare con il tasto destro del mouse sul programma Station1 e selezionare Generate Robot Program.
Dovrebbe visualizzare automaticamente il programma del robot in un editor di testo. Potrà vedere tutti i comandi di movimento specifici e la sintassi richiesta dal controller del robot ABB.