Deburring
Introduzione
La sbavatura robotica della plastica consiste in un braccio robotico che rimuove il materiale in eccesso dalle parti stampate in plastica. Questo esempio la aiuterà a creare un progetto in RoboDK per la simulazione del robot e la programmazione offline. Questo esempio mostra anche come può utilizzare il plugin Fusion 360 per generare percorsi utensile in RoboDK.
Con il plug-in RoboDK per Fusion 360, può creare facilmente un progetto di lavorazione ed esportare automaticamente il percorso generato all'interno di RoboDK. RoboDK lo trasformerà poi in un programma robotico. può caricare facilmente i modelli 3D creati in SolidWorks in RoboDK. L'Add-in RoboDK le permette di programmare qualsiasi braccio robotico direttamente da Fusion 360 per qualsiasi applicazione di produzione.
Esempio di sbavatura di plastica
Per avviare il progetto, dovrà prima selezionare l'esempio di sbavatura di plastica di RoboDK dalla libreria predefinita.
Impostazione
Questo esempio utilizza una configurazione semplice: Un robot montato su un tavolo (questo esempio include un robot ABB), una pila per il pezzo appena stampato, una pila per quello lavorato e la dima al centro per tenere il pezzo in posizione
Caricare la stazione:
1.Selezionare File ➔
2.Individui l'esempio di Sbavatura plastica nella sezione esempi di RoboDK:
C:/RoboDK/Examples/Plugin-Fusion360-Plastic-Deburring.rdk.
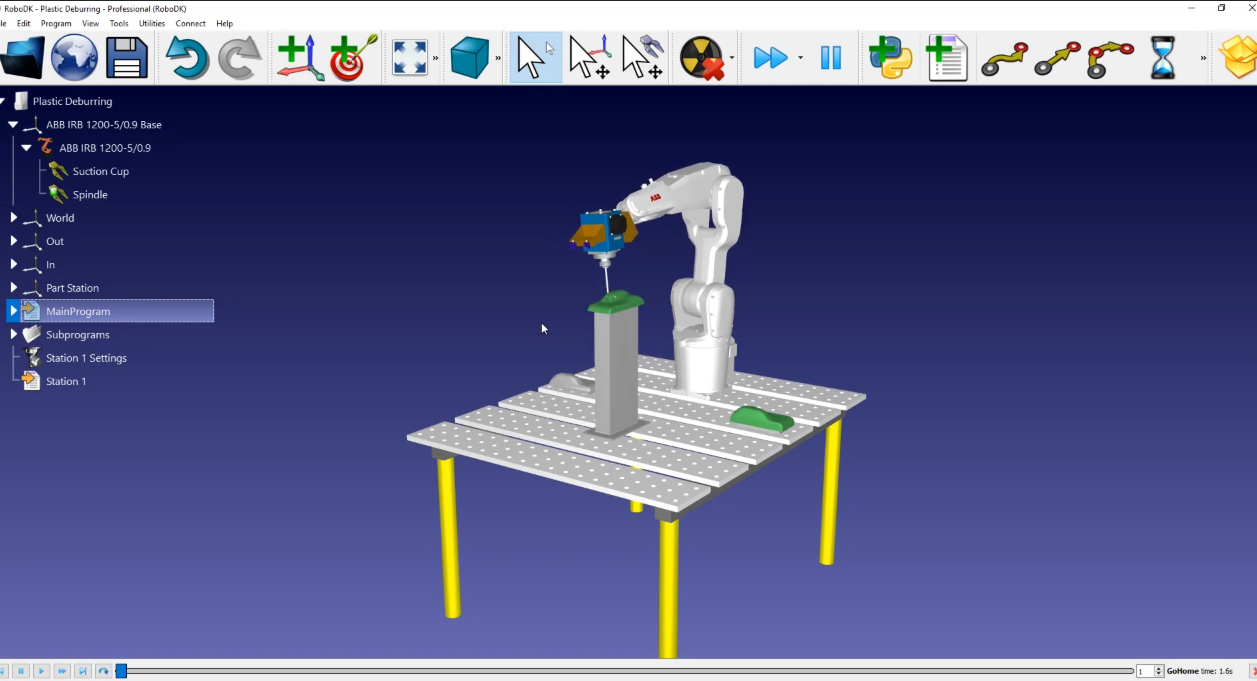
Dopo aver caricato la stazione, può aprire Fusion 360.
Schizzo 2D da Fusion 360
Apra il suo oggetto in Fusion 360. In questo esempio, l'oggetto è una parte in plastica. L'obiettivo di questo progetto è rimuovere il materiale in eccesso nei tre fori e tutto intorno alla parte vicino alla parte inferiore.
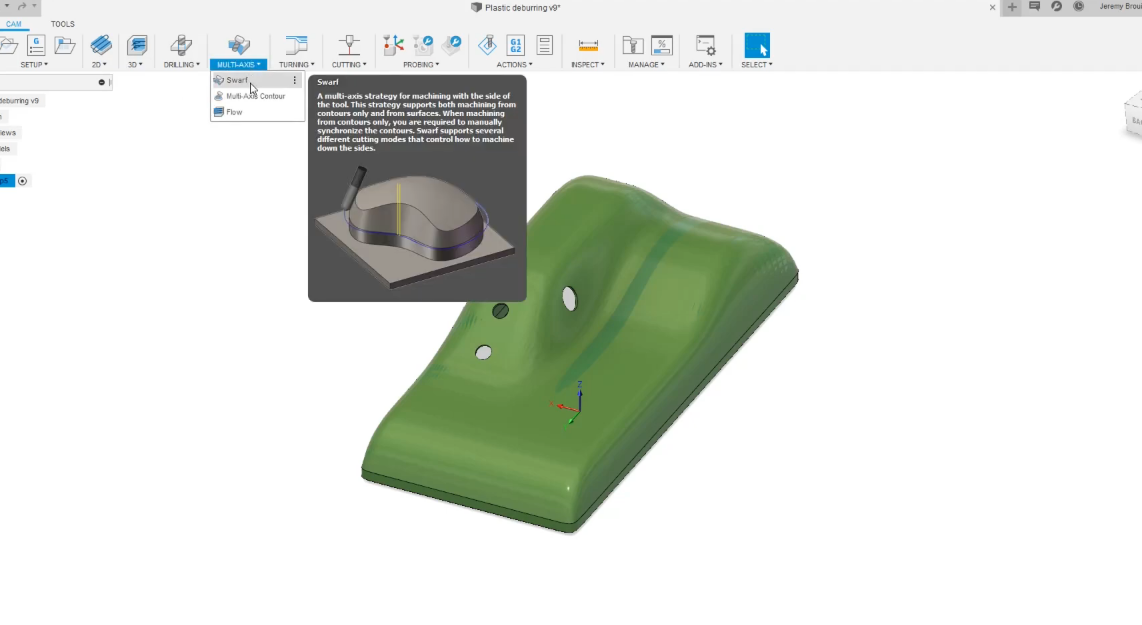
Per prima cosa, deve assicurarsi di trovarsi nella scheda dell'area di lavoro "Produzione" di Fusion. Dovremmo seguire questi passaggi per creare il percorso utensile:
1.Selezionare Multi-Axis e poi selezionare lo strumento Trucioli.
2.Selezioni lo strumento che desidera utilizzare (in questo esempio utilizzeremo uno strumento personalizzato della nostra stazione RoboDK) e poi selezioni il foro per creare il primo percorso.
3.Per ottenere il percorso utensile sul lato destro della superficie, selezioneremo Lavora altro lato e poi selezioneremo Ok. Segua questa procedura per ogni foro.
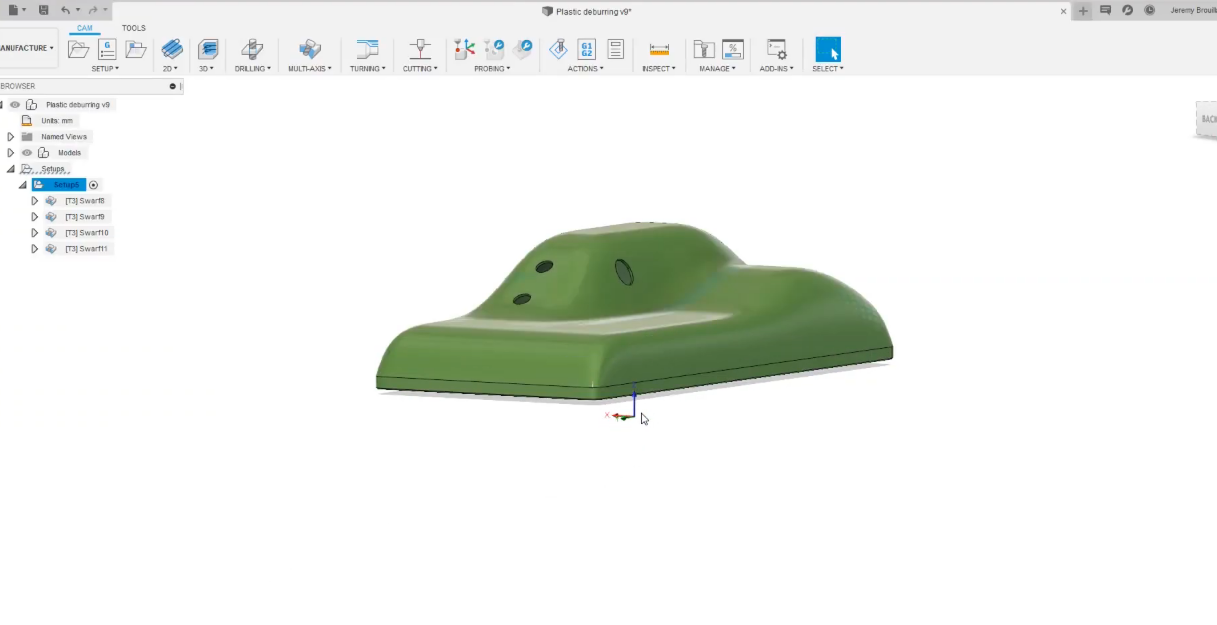
4.Per fare la stessa cosa con la parte inferiore, dovrà selezionare lo strumento Trucioli e poi selezionare la parte inferiore.
5.Una volta eseguito il calcolo, simuleremo i percorsi appena creati: Selezioni la sua Impostazione e poi selezioni Simulazione.
Avrà un percorso utensile completo per il suo robot. Dovremo tornare in RoboDK per assicurarci che il piano di riferimento "Sbavatura" sia attivato. Per farlo, dobbiamo:
Vada in RoboDK: selezioni Sbavatura e poi selezioni Attiva piani di riferimento.
Ora che il quadro di riferimento della sbavatura è attivato, il programma verrà esportato rispetto a quel quadro di riferimento. e tornerà in Fusion 360 e verificherà che l'immagine sia come mostrato:
Segua questi passaggi per caricare il suo schizzo in RoboDK:
1.In Fusion 360, è disponibile il plugin RoboDK. Selezioni semplicemente Carica progetto CAM in RoboDK.
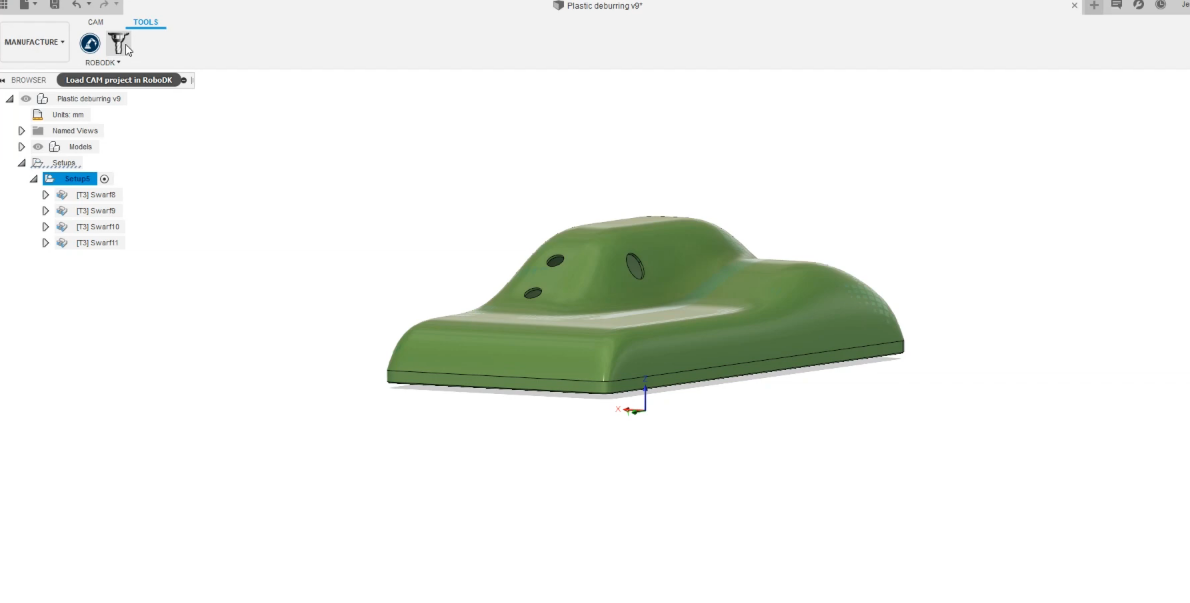
2.Se torniamo a RoboDK, possiamo trovare il percorso di taglio al suo posto. È stato creato un "Progetto di lavorazione" chiamato "Sbavatura plastica": Selezionare Sbavatura e poi selezionare Visibile.
3.Possiamo rinominare il percorso utensile di taglio in "Impostazioni Stazione1": Clicchi con il tasto destro del mouse su Sbavatura plastica per rinominarlo.
Stazione RoboDK
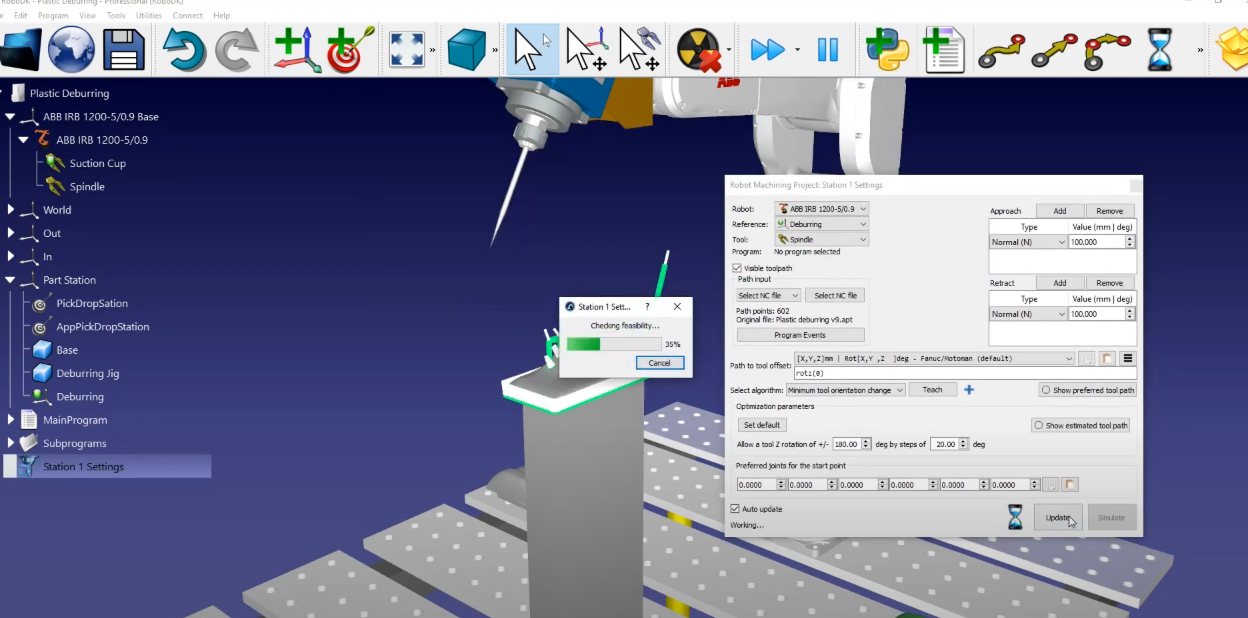
Una volta preparato il percorso utensile del robot in RoboDK, dobbiamo assicurarci che la cella del robot virtuale corrisponda alla configurazione reale. In RoboDK ci assicuriamo di utilizzare l'utensile e il quadro di riferimento corretti per l'operazione di produzione, prima di generare il programma del robot.
In questo esempio abbiamo selezionato il riferimento Sbavatura e l'utensile come Mandrino. Selezioni Aggiornamento➔ Simulazione.
Se desidera riordinare o cambiare il senso di una sezione di percorso, segua questi passaggi:
1.I progetti CAM di solito sono già dotati di movimenti di avvicinamento e ritrazione, quindi possiamo rimuovere i nostri: Basta andare su "Avvicinamento" e "Ritrazione" e selezionare Rimuovi. Selezionare Aggiorna e poi Simula.
2.In questo esempio, i parametri predefiniti producono un risultato valido. L'unica impostazione aggiuntiva che potremmo voler modificare è l'attivazione e la disattivazione del mandrino: Aprire il programma Eventi➔ Aggiungere una subroutine in "Avvicinamento al percorso" e "Ritrazione del percorso" spuntando ogni opzione e scrivere "Mandrino (1)" in Avvicinamento al percorso e "Mandrino (0)" in Ritrazione del percorso. Questo presuppone che sia stata definita una funzione nel controllore che possa accettare un parametro per attivare o disattivare il mandrino.
3.Selezionare Aggiornamento.
Ora dobbiamo modificare il nome del programma che abbiamo creato "Stazione 1" e lanciare il "Programma principale".
L'ultima cosa da fare è generare il programma del robot. Poiché stiamo usando un robot ABB, dovremo esportare un file mod per il controller del robot ABB che utilizza il linguaggio di programmazione RAPID, di proprietà di ABB.
1.Si assicuri di utilizzare il post processor corretto: Selezioni la stazione➔ Selezioni il post-processor➔ ABB RAPID IRC 5.
2.Cliccare con il tasto destro del mouse sul programma Station1 e selezionare Generate Robot Program.
Dovrebbe visualizzare automaticamente il programma del robot in un editor di testo. Potrà vedere tutti i comandi di movimento specifici e la sintassi richiesta dal controller del robot ABB.