Polishing
Introduzione
Questa sezione la aiuterà a creare un progetto di base in RoboDK per la simulazione di robot e la programmazione offline. In questo esempio viene simulato e programmato un robot KUKA per un'applicazione di levigatura o lucidatura con Inventor e RoboDK. Imparerà a generare un percorso reale del robot su una superficie curva creando uno schizzo 3D in Inventor e importandolo in RoboDK.
Con il plug-in RoboDK per Autodesk Inventor può caricare facilmente i modelli 3D creati in Inventor in RoboDK. Questo plug-in le permette di programmare oltre 50 diversi produttori di robot e 500 robot direttamente da Inventor.
Il RoboDK Add-in per Autodesk Inventor funziona con Inventor 2018 e successivi. L'Add-in RoboDK per Inventor è gratuito se possiede già una licenza RoboDK.
Esempio di lucidatura
Questa sezione le mostrerà come può utilizzare un robot KUKA per la lucidatura.
Impostazione
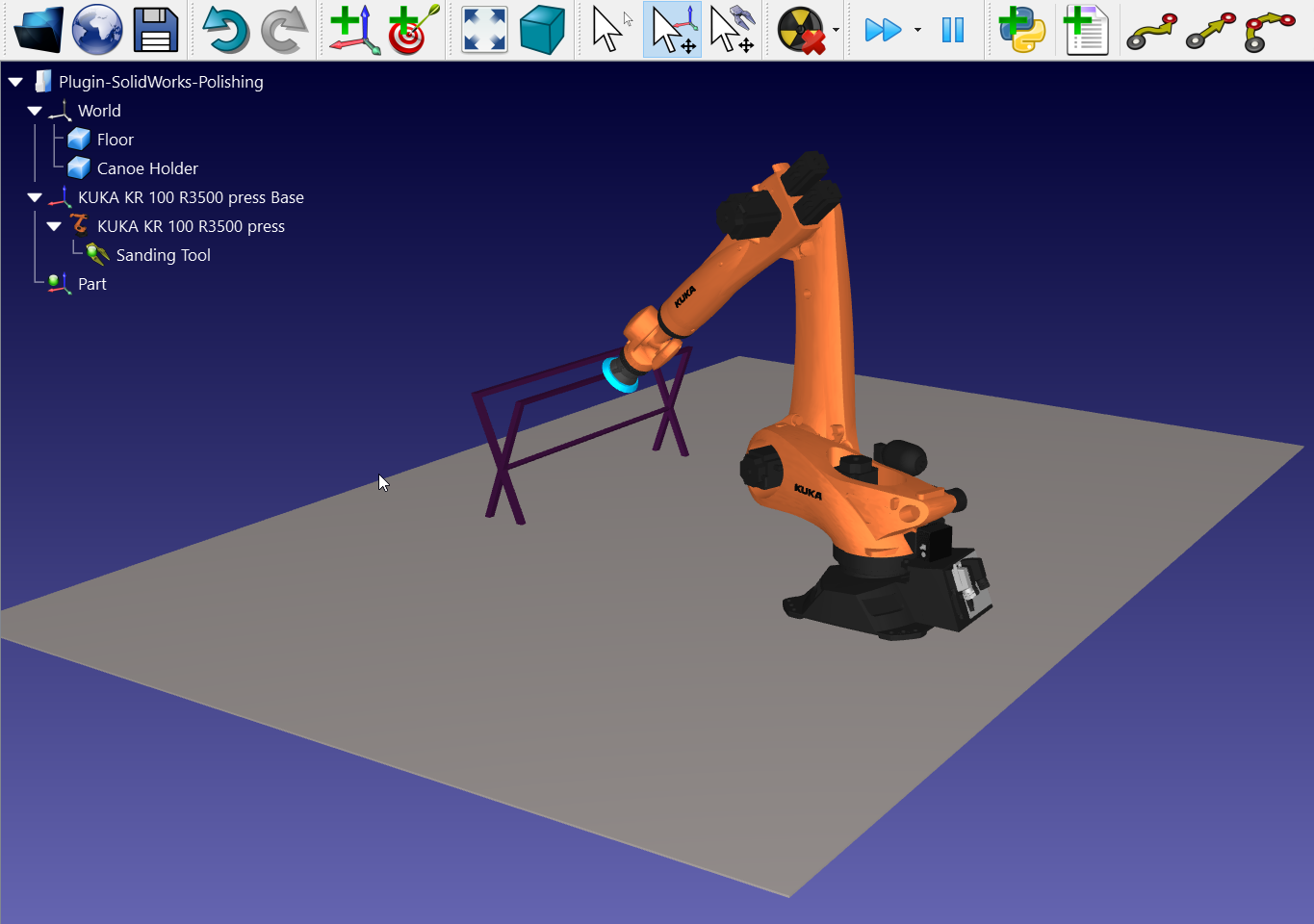
Per avviare il progetto, dovrà innanzitutto selezionare l'esempio di lucidatura di RoboDK nella libreria predefinita.
L'esempio comprende un robot KUKA, uno strumento di lucidatura rotativa, il pezzo (canoa) e un supporto metallico su cui poggia la canoa.
Apra il progetto:
1.Selezionare File ➔
2.Individui l'esempio di lucidatura nella sezione esempi di RoboDK:
C:/RoboDK/Examples/Plugin-Inventor-Polishing.rdk.
Ora che ha caricato la stazione, può aprire Inventor.
Schizzo 3D da Inventor
Apra il suo oggetto 3D in Inventor. In questo esempio, l'oggetto 3D è una canoa con una superficie esterna curva che deve essere lucidata.
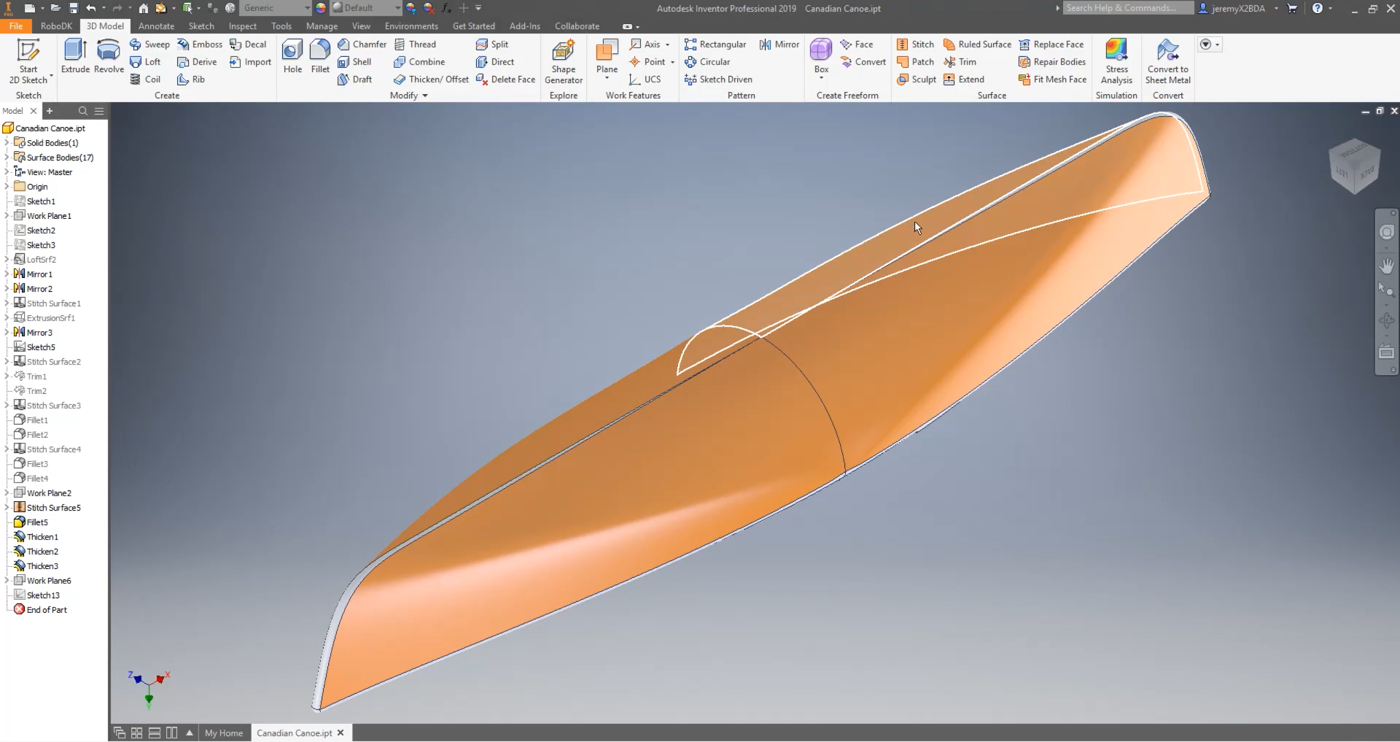
L'obiettivo di questo progetto è creare e importare un percorso di lucidatura su una superficie curva. Il percorso sarà un movimento di salita e discesa per lucidare la prima sezione del pezzo
Dovrà creare un piano con un angolo di 45 gradi per disegnare un percorso sul piano e poi utilizzare lo strumento di proiezione di curve per proiettare il percorso sulla superficie curva.
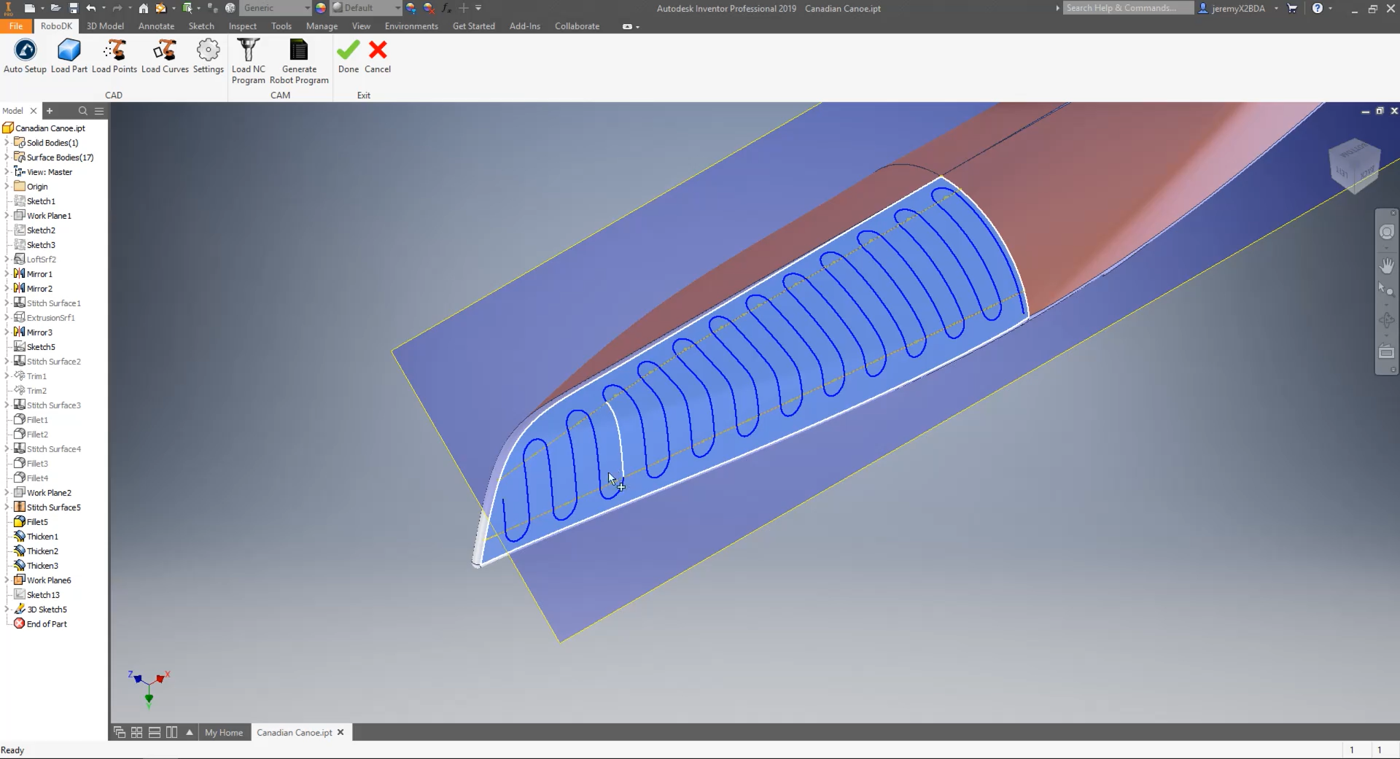
In questo esempio, RoboDK ha già disegnato il percorso. Può renderlo visibile cliccando con il tasto destro del mouse su Schizzo13➔ Visibilità nel menu a sinistra, come mostrato nell'immagine sottostante.
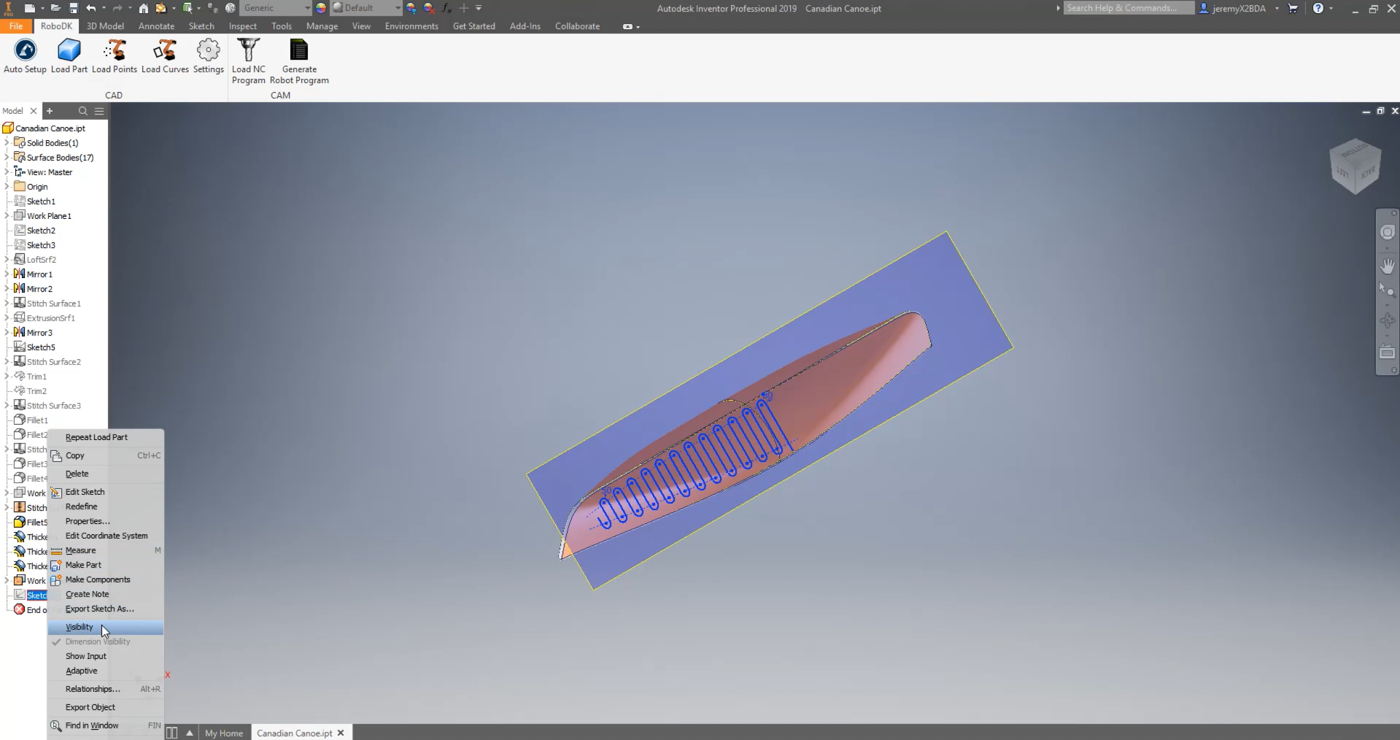
Come può vedere, il percorso copre tutta la prima sezione selezionata. Può riaprire lo schizzo e modificare il percorso, se necessario, facendo clic con il pulsante destro del mouse su Schizzo13➔ Modifica schizzo.
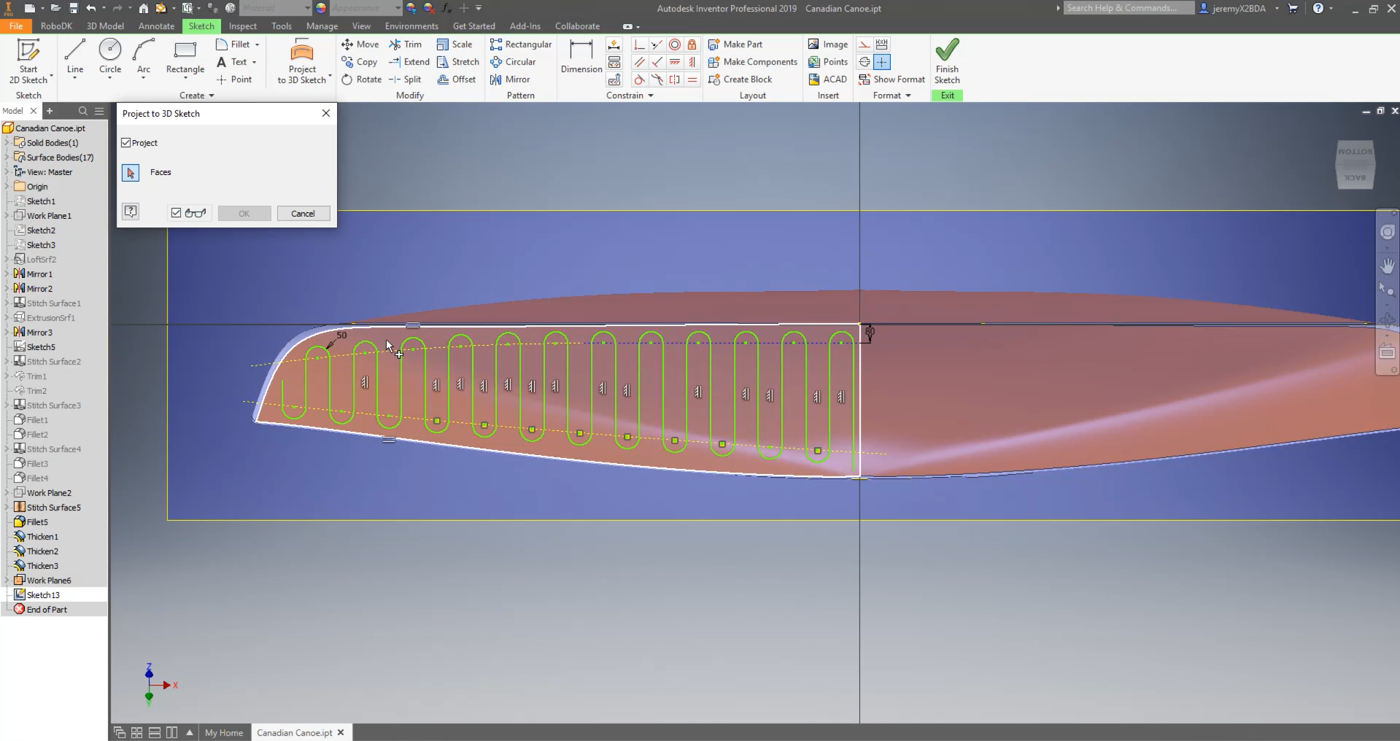
Ora è semplice proiettare il percorso sulla superficie utilizzando lo strumento Inventor:
1.Selezioni la scheda Schizzo in Inventor e selezioni Progetto su schizzo 3D.
2.Selezioni la superficie su cui vuole che venga proiettato il percorso.
3.Selezioni OK e Termina schizzo.
Non appena accetta queste modifiche, verrà creato uno schizzo 3D.
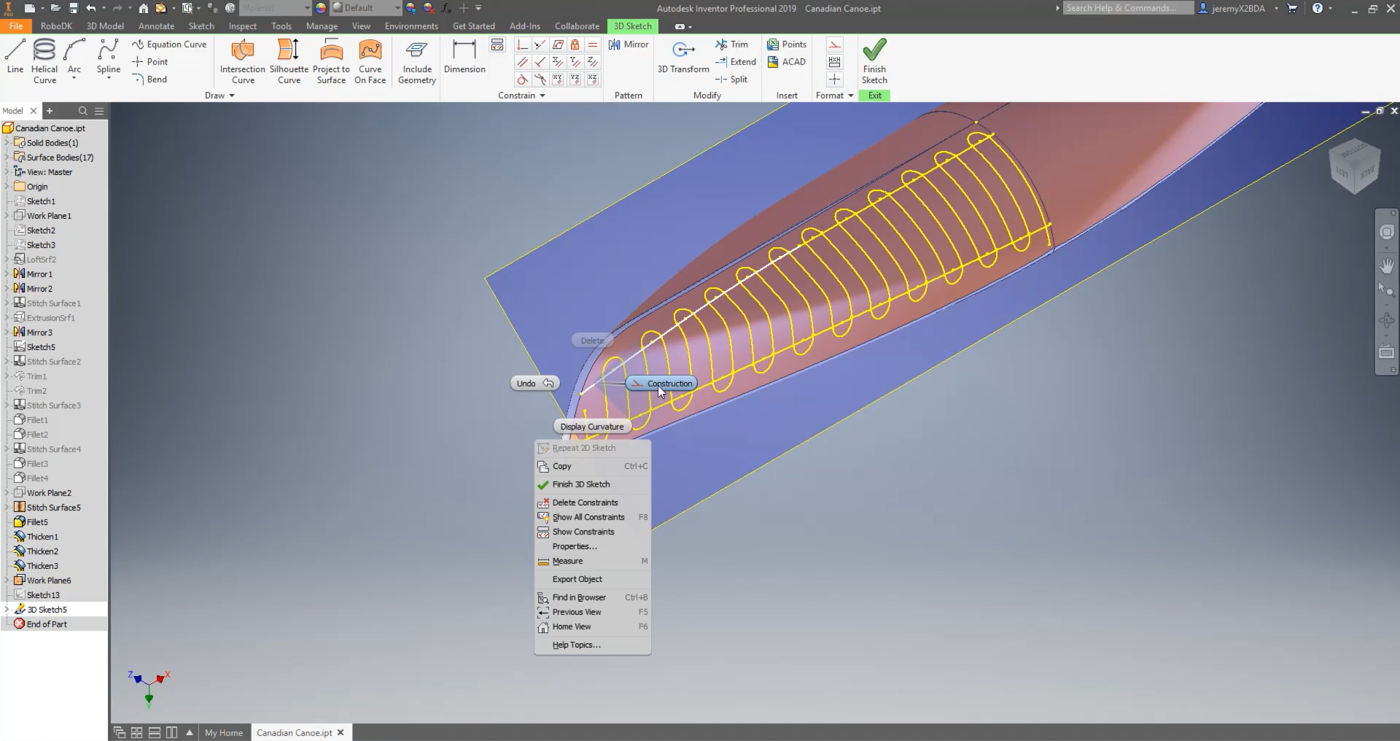
Si assicuri che le linee di costruzione create siano definite correttamente come linee di costruzione:
1.Clicchi con il tasto destro del mouse su Schizzo13➔ Visibilità per rendere visibile il percorso.
2.Clicchi con il tasto destro del mouse su Schizzo13➔ Modifica Schizzo 3D
3.Selezioni la linea che desidera controllare sul suo modello 3D.
4.Selezionare la costruzione.
5.Selezioni Finisci schizzo.
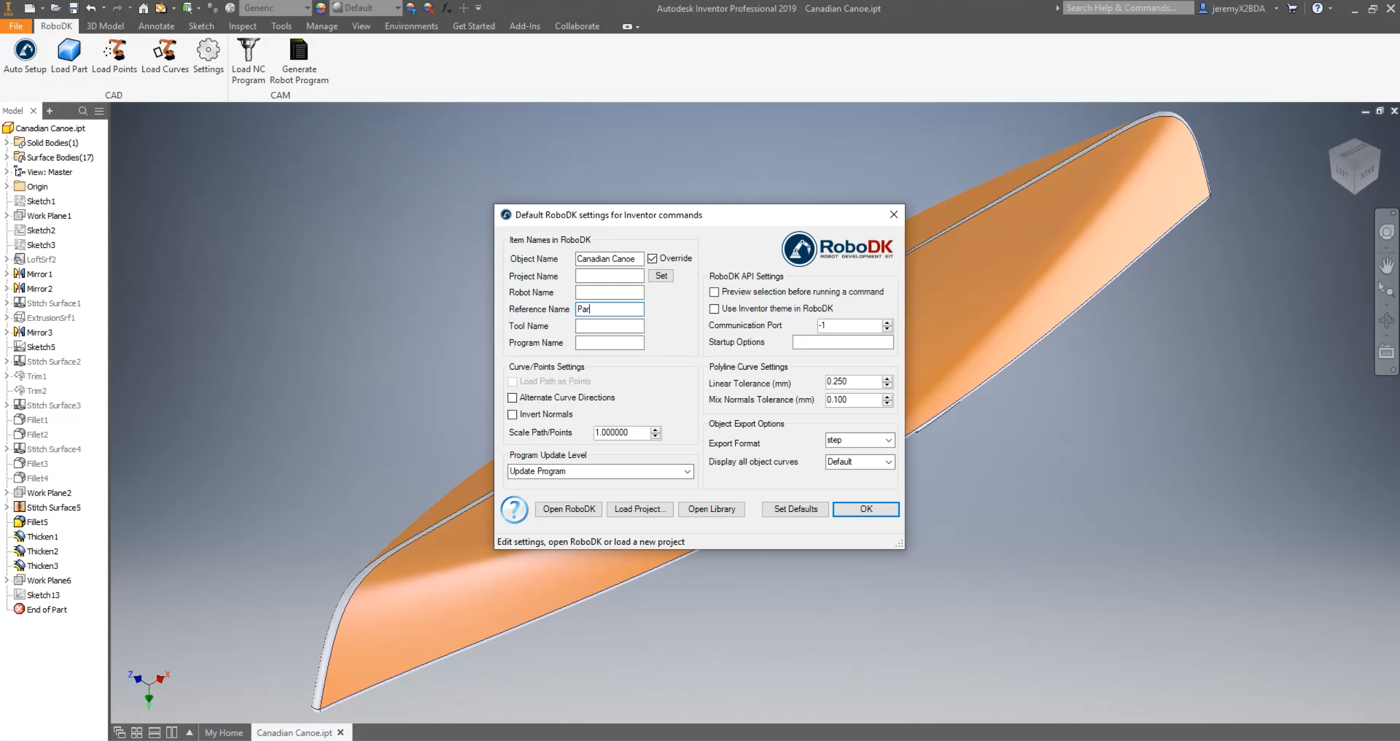
Segua i passi successivi per caricare il suo schizzo in RoboDK:
1.Selezioni la scheda RoboDK in Inventor e selezioni
2.Inserisca il nome dell'oggetto. In questo caso si tratta di Canoa canadese.
3.Inserisca il Nome di riferimento in cui desidera che la sua parte venga importata. In questo esempio è Parte. Se non fornisce alcun nome di riferimento, verrà utilizzato il piano di riferimento attivato. Se non esiste un piano di riferimento attivato, ne verrà creato automaticamente uno nuovo.
4.Chiudere la finestra Impostazioni o selezionare OK.
5.Selezioni il pulsante
6.Selezioni tutte le linee e le superfici superiori del suo schizzo e prema OK. Questo passaggio è essenziale, in quanto fornirà a RoboDK le informazioni necessarie per calcolare la normale alla superficie e quindi calcolare l'orientamento dello strumento di lucidatura sulla superficie curva.
7.Selezioni
Dovrebbe vedere la parte (Canoa canadese) e il percorso (Percorso polacco 1) caricati in RoboDK sul piano di riferimento attivo (Parte).
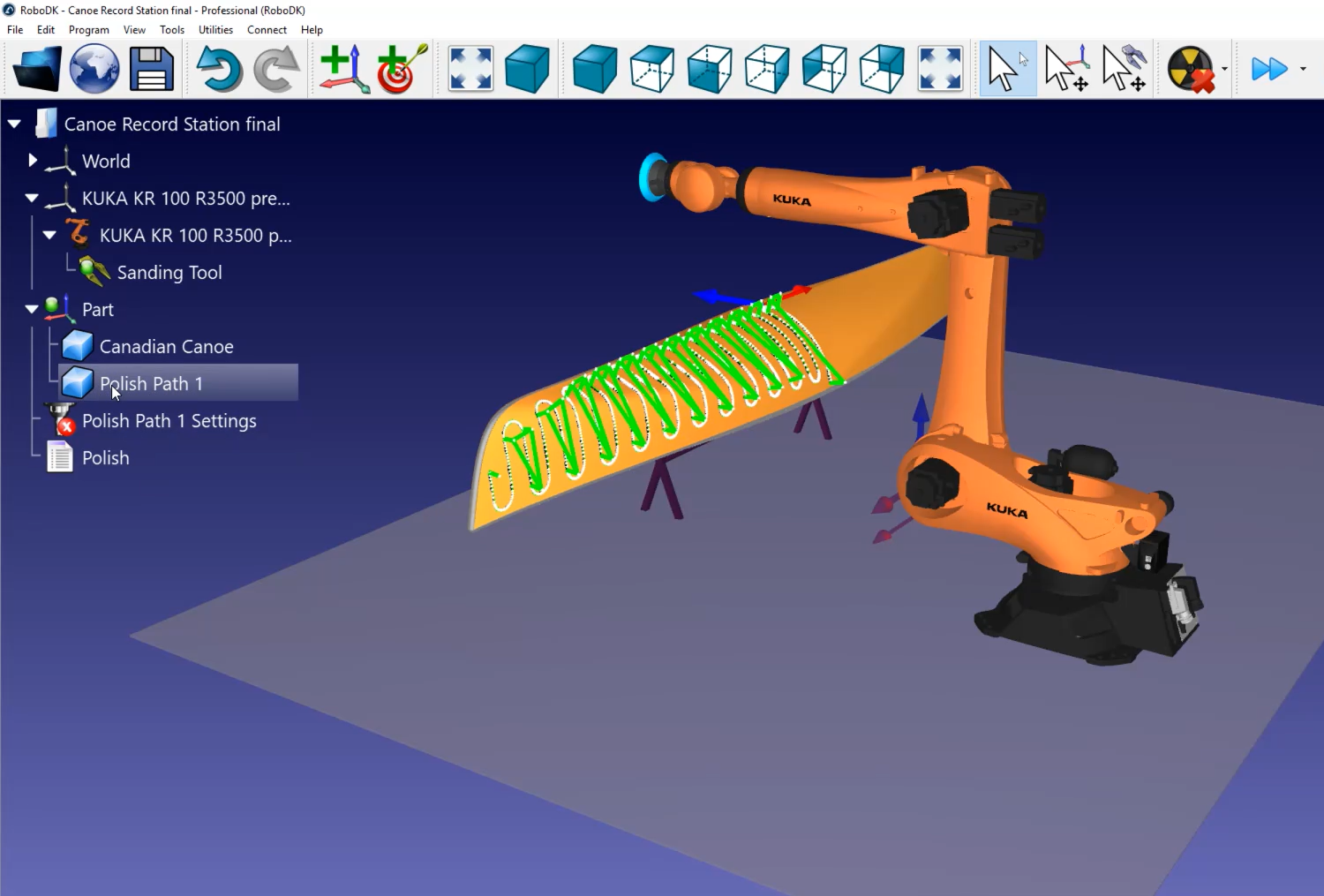
Stazione RoboDK
Il passo successivo consiste nel verificare se l'ordine in cui verranno eseguite le sezioni del percorso è corretto, selezionando
Può vedere le piccole linee bianche che escono dal percorso sulla canoa. Si tratta delle normali della superficie. In questo esempio, tutte sembrano essere state importate correttamente.
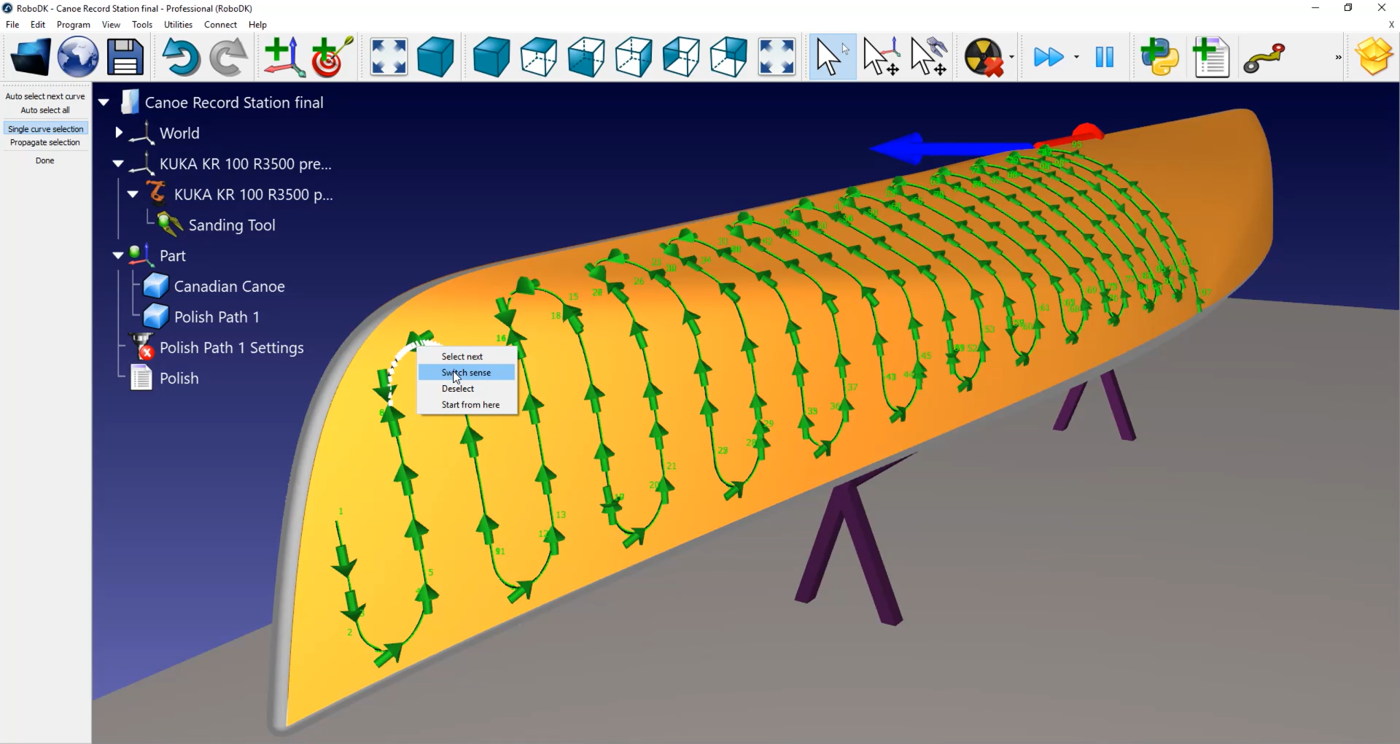
Segua questi passaggi per impostare la direzione del percorso:
1.Selezioni
2.Clicchi su Seleziona curva.
Ora può vedere l'ordine e la direzione in cui vengono eseguiti i segmenti del percorso. Se desidera cambiare direzione, faccia clic con il pulsante destro del mouse e selezioni Cambia senso.
In questo caso, il percorso deve essere rifatto:
1.Clicchi con il tasto destro del mouse su uno spazio vuoto della stazione (cioè lo sfondo blu).
2.Selezionare Ripristina selezione.
3.Selezioni la linea con cui vuole iniziare. Si assicuri che sia rivolta nella direzione giusta.
4.Selezioni lo strumento Selezione automatica di tutti nell'angolo superiore sinistro dello schermo.
5.Selezioni Fatto.
Ora può simulare la sua stazione facendo doppio clic su
Può anche aggiungere movimenti normali di 200 millimetri per evitare la collisione tra il robot e la canoa, facendo doppio clic su
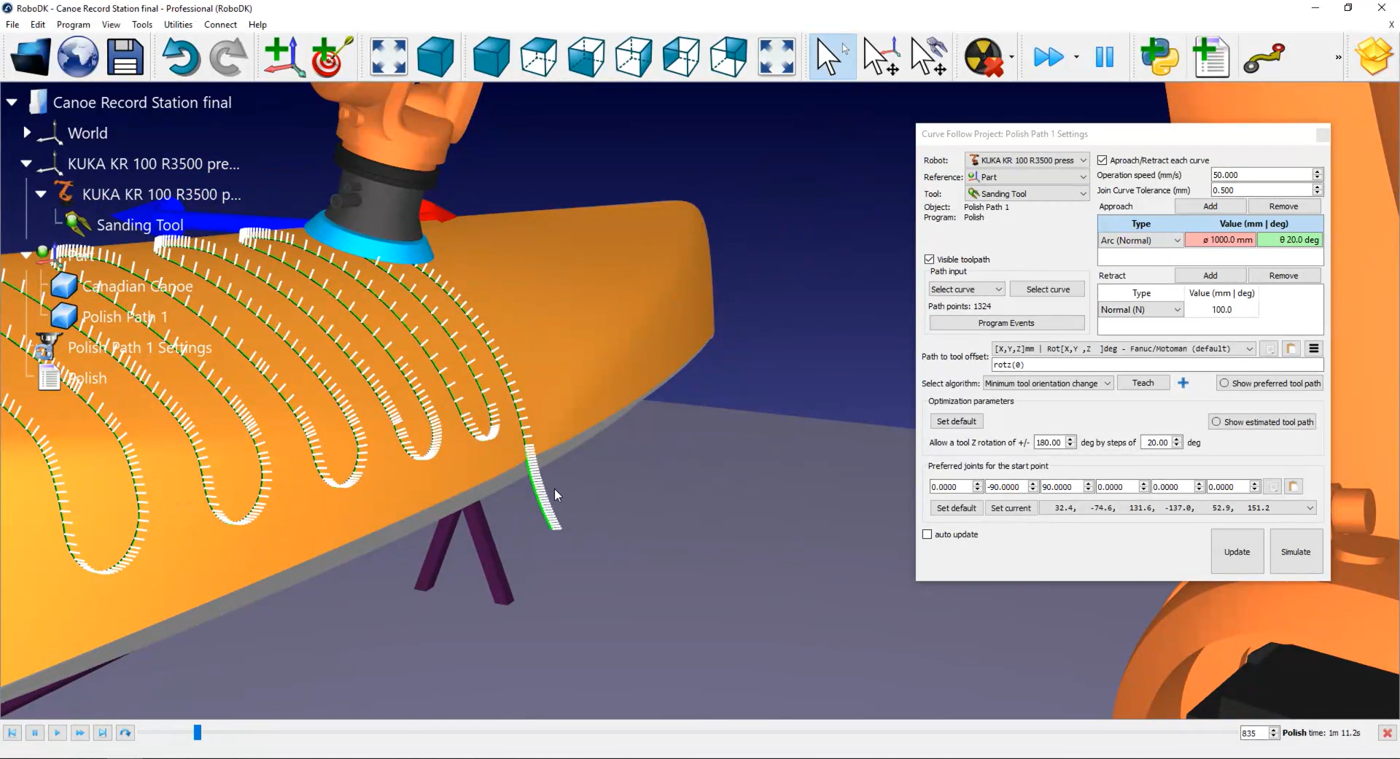
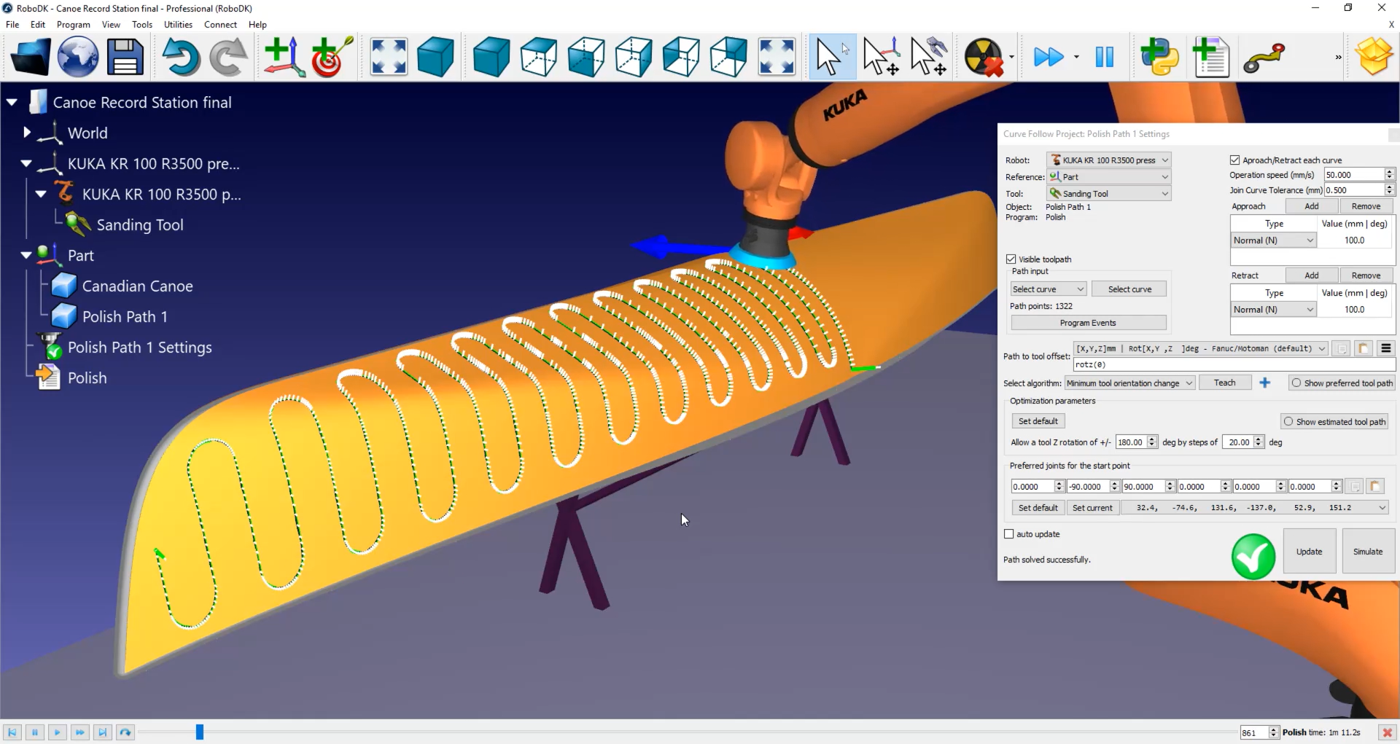
Può modificare la velocità di avvicinamento e di ritrazione selezionando
In questo menu può anche attivare l'opzione Imposta arrotondamento. Per impostazione predefinita, ogni linea bianca lungo percorso è un punto che verrà inviato al controllore del robot come punto in cui il robot deve fermarsi. In un'applicazione di lucidatura o levigatura, questo non è il comportamento migliore.
Attivi la casella di controllo Imposta arrotondamento per attivare l'opzione di movimento continuo nel suo controller. A seconda della marca del robot, il nome dell'opzione può essere "arrotondamento", "movimento costante" o "dati di zona". In questo esempio il valore sarà 0,5 mm.
In questo esempio, poiché stiamo utilizzando un robot KUKA, otterrà un file SRC quando genera il programma del robot. Questo file può essere letto da un controller KUKA KRC.
Segua questi passaggi per generare un programma robotico:
1.Clicchi con il tasto destro del mouse su
2.Selezioni OK.
3.Clicchi con il tasto destro del mouse su