Saldatura a punti
La saldatura a punti è uno dei compiti più comuni che richiedono l'uso di un software di simulazione robotica. Questa guida mostra come simulare e programmare un robot per la saldatura a punti automatizzata di pannelli di carrozzeria.
Può trovare il campione disponibile nella nostra libreria di esempi: Collegamento alla stazione di saldatura a punti.
Requisiti
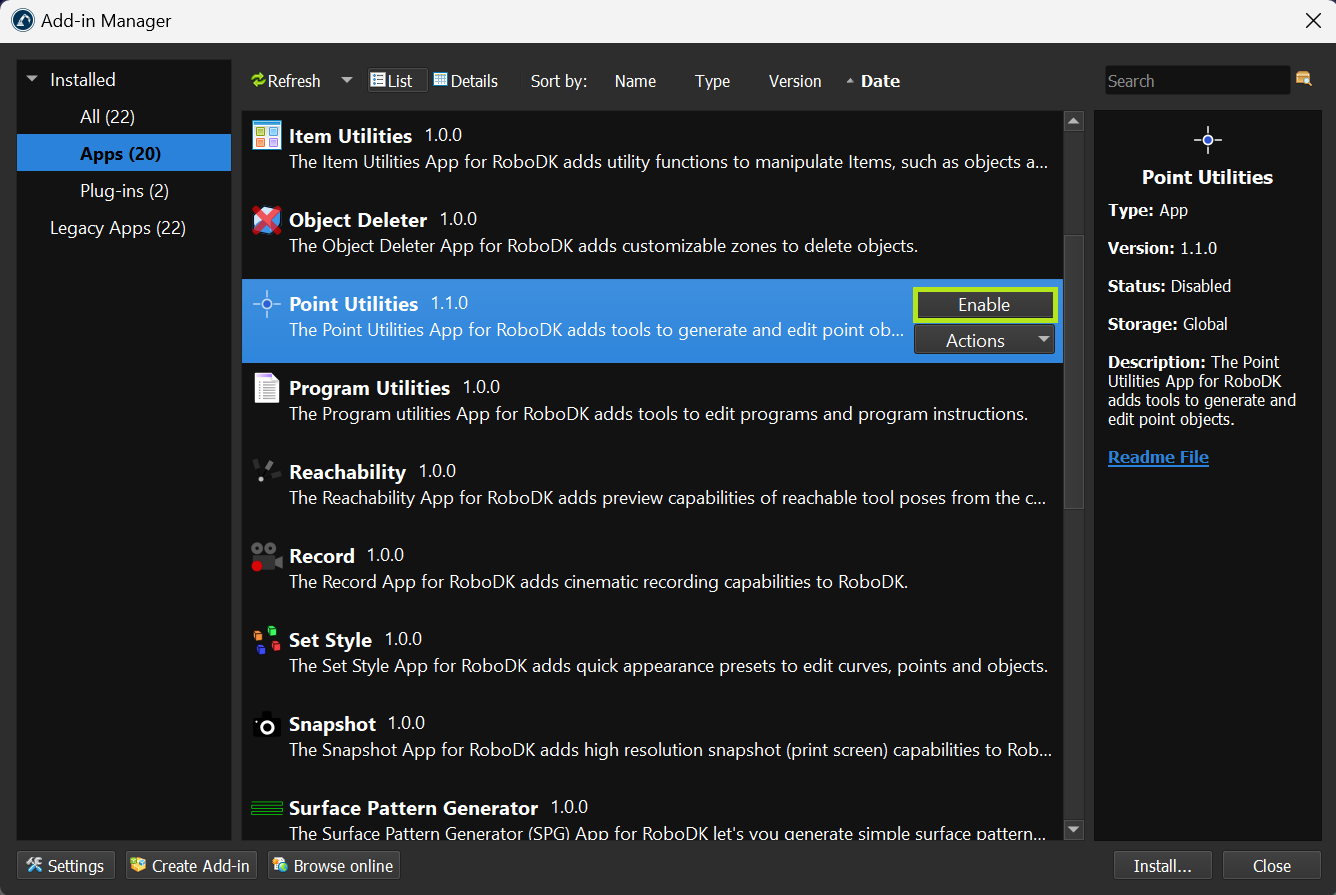
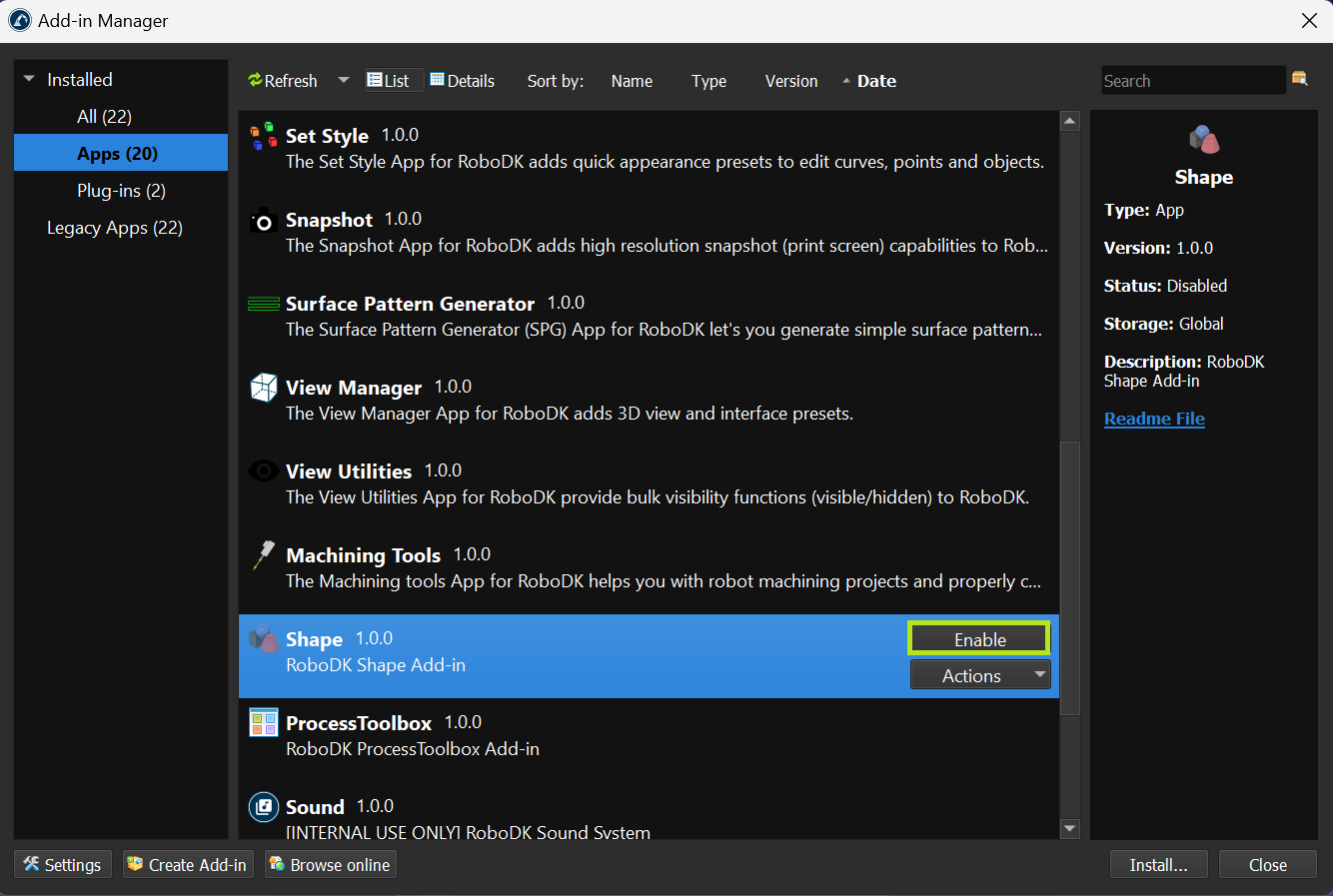
Per creare correttamente l'esempio di saldatura a punti, deve utilizzare RoboDK v5.5.4 o successivo. Questa versione di RoboDK include le Utilità Punto e l'Add-in Forma che facilitano la creazione del progetto di saldatura a punti.
Flusso di lavoro
Questa sezione la guiderà nella creazione di una simulazione di saldatura a punti, compresa la generazione automatica di un percorso senza collisioni utilizzando il plugin Collision Free Planner.
Questa sezione suddivide il processo di creazione del progetto di saldatura a punti nelle seguenti fasi:
1.Carica tutti i modelli, i robot e gli strumenti necessari.
2.Impostazione dello strumento (TCP).
3.Creare bersagli.
4.Crea e controlla i percorsi/traiettorie dei robot.
5.Analizzare il percorso.
6.Organizzare la sequenza del programma.
7.Generare programmi di robot.
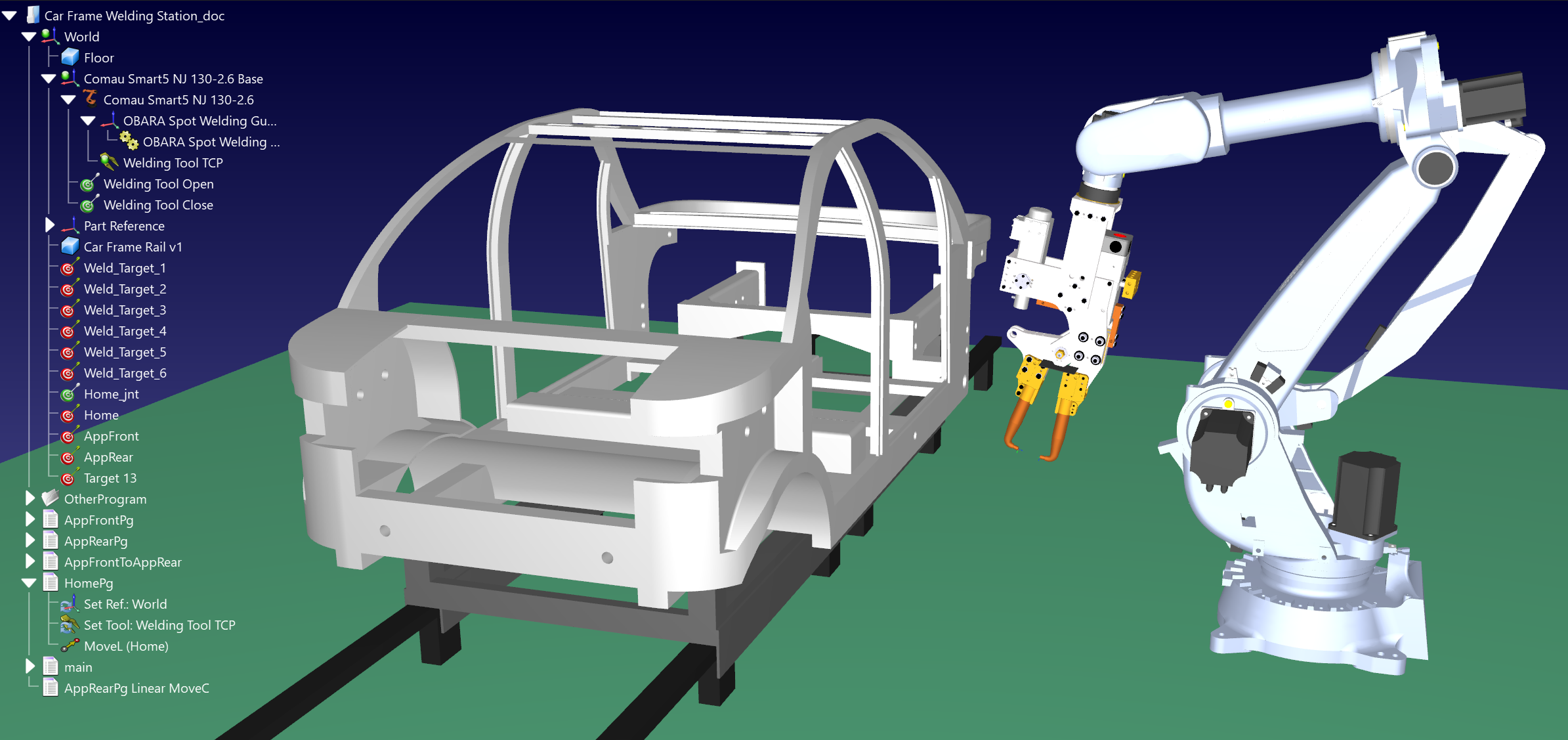
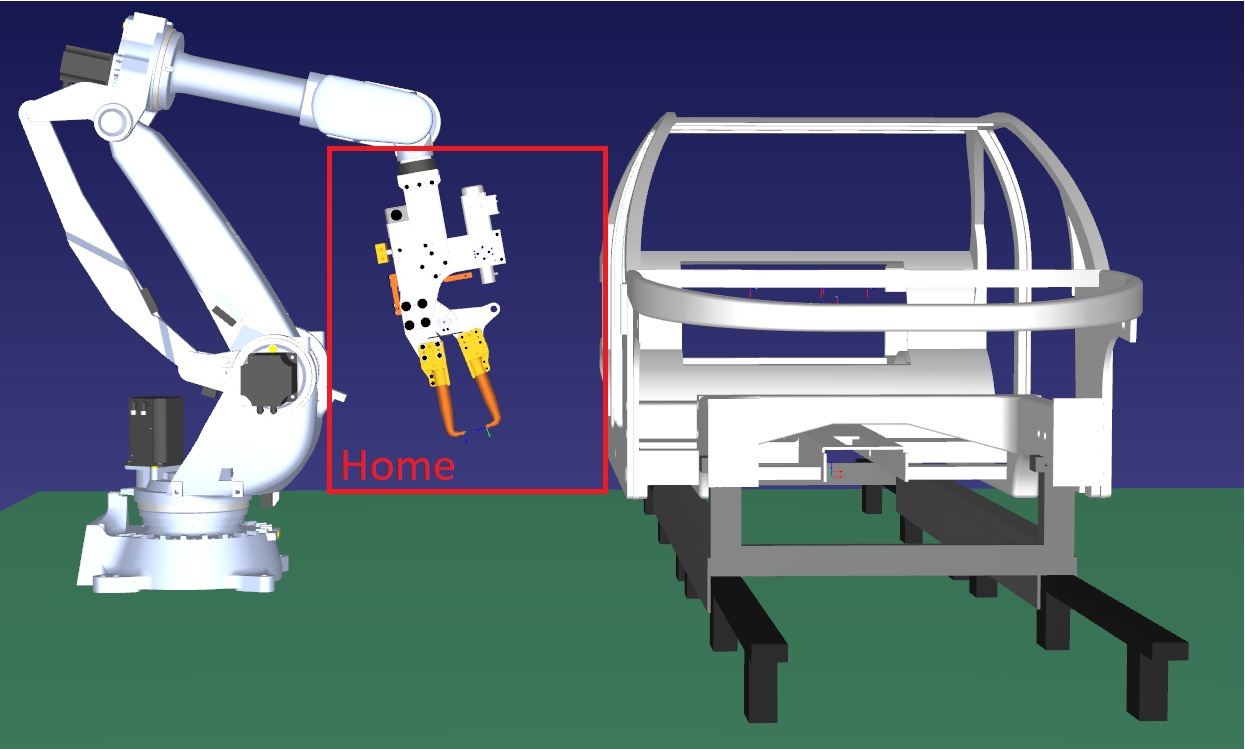
Componenti della stazione
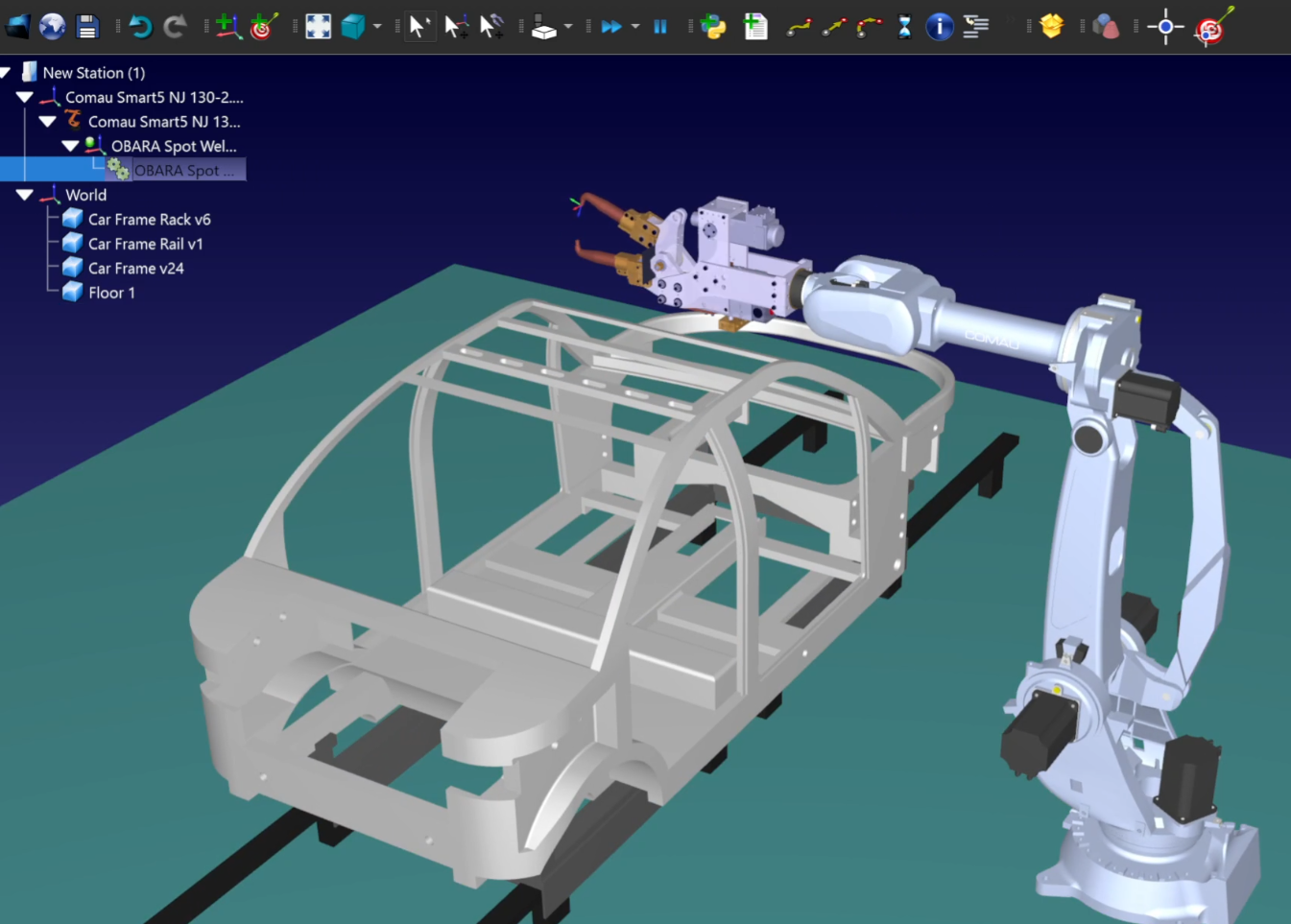
Per prima cosa deve caricare un robot e una pistola per la saldatura a punti come strumento del robot.
Può utilizzare i seguenti componenti dalla libreria online di RoboDK:
1.Robot: Comau Smart5 NJ 130-2.6
2.Strumento: Pistola per saldatura a punti OBARA
Il piedistallo e l'apparecchio saranno caricati utilizzando file locali, mentre per creare il pavimento utilizzeremo l'Add-in Shape. Per ulteriori dettagli, può consultare la nostra Guida introduttiva e la Documentazione dell'Add-in Shape.
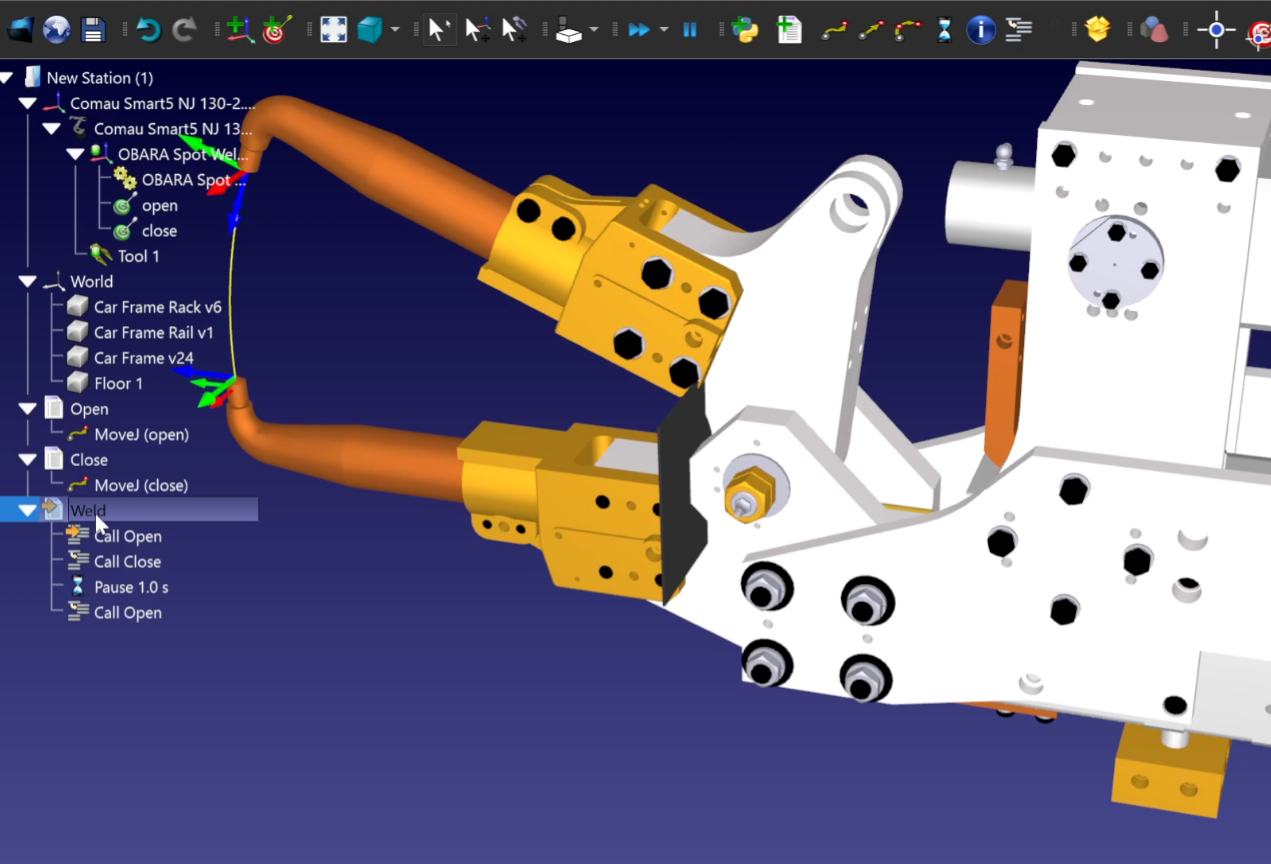
Pistola per saldatura a punti
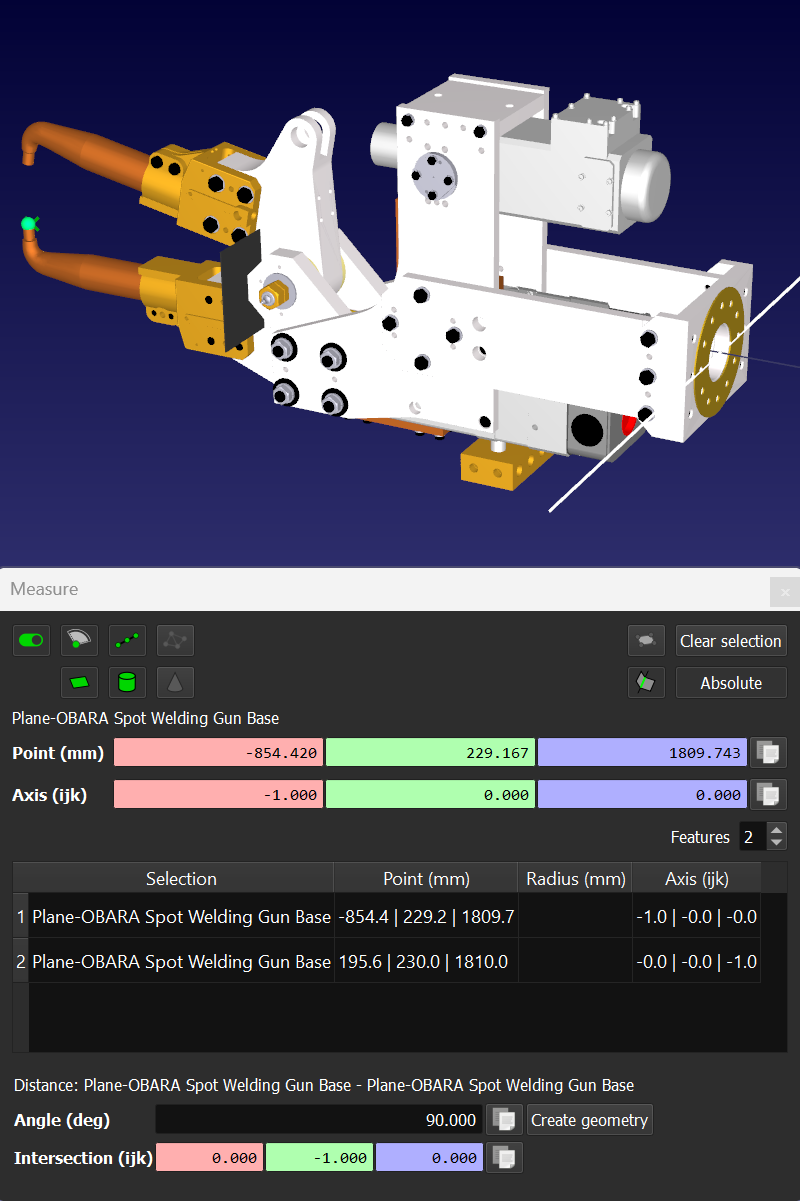
Questa sezione mostra come può animare il movimento della pistola di saldatura a punti e creare il punto centrale dell'utensile (TCP).
Per aggiungere una pistola per saldatura a punti con una parte di bloccaggio mobile, è necessario definire il TCP corrispondente e allegare il meccanismo separatamente. Può misurare la posizione del punto TCP in relazione alla flangia selezionando Strumenti-Misura.
Può creare due target di giunzione per aprire e chiudere la pistola di saldatura a punti. Questi bersagli possono essere utilizzati nei programmi per simulare il processo di saldatura a punti:
Punti di saldatura a punti
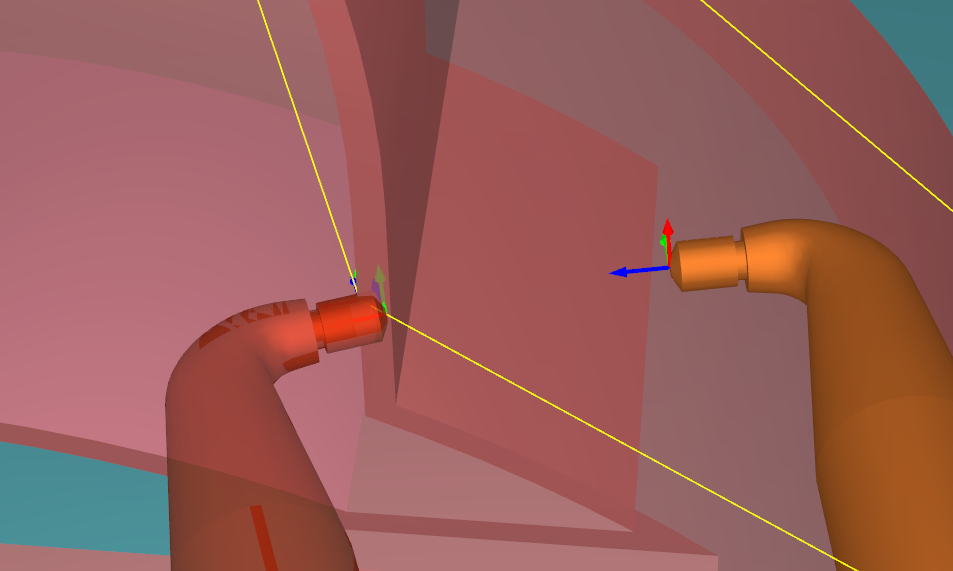
Questa sezione mostra come creare i punti di saldatura a punti sul telaio dell'auto per spostare la pistola di saldatura a punti.
Supponiamo che debba saldare a punti la parte anteriore e posteriore del telaio dell'auto. Utilizzando l'Add-in Utilità Punti, può posizionare i punti di saldatura a punti direttamente sulle superfici. Dopo aver convertito i punti in bersagli (questa è una funzione integrata dell'Add-in Utilità Punti), può riallineare l'orientamento dei bersagli rispetto agli angoli TCP:
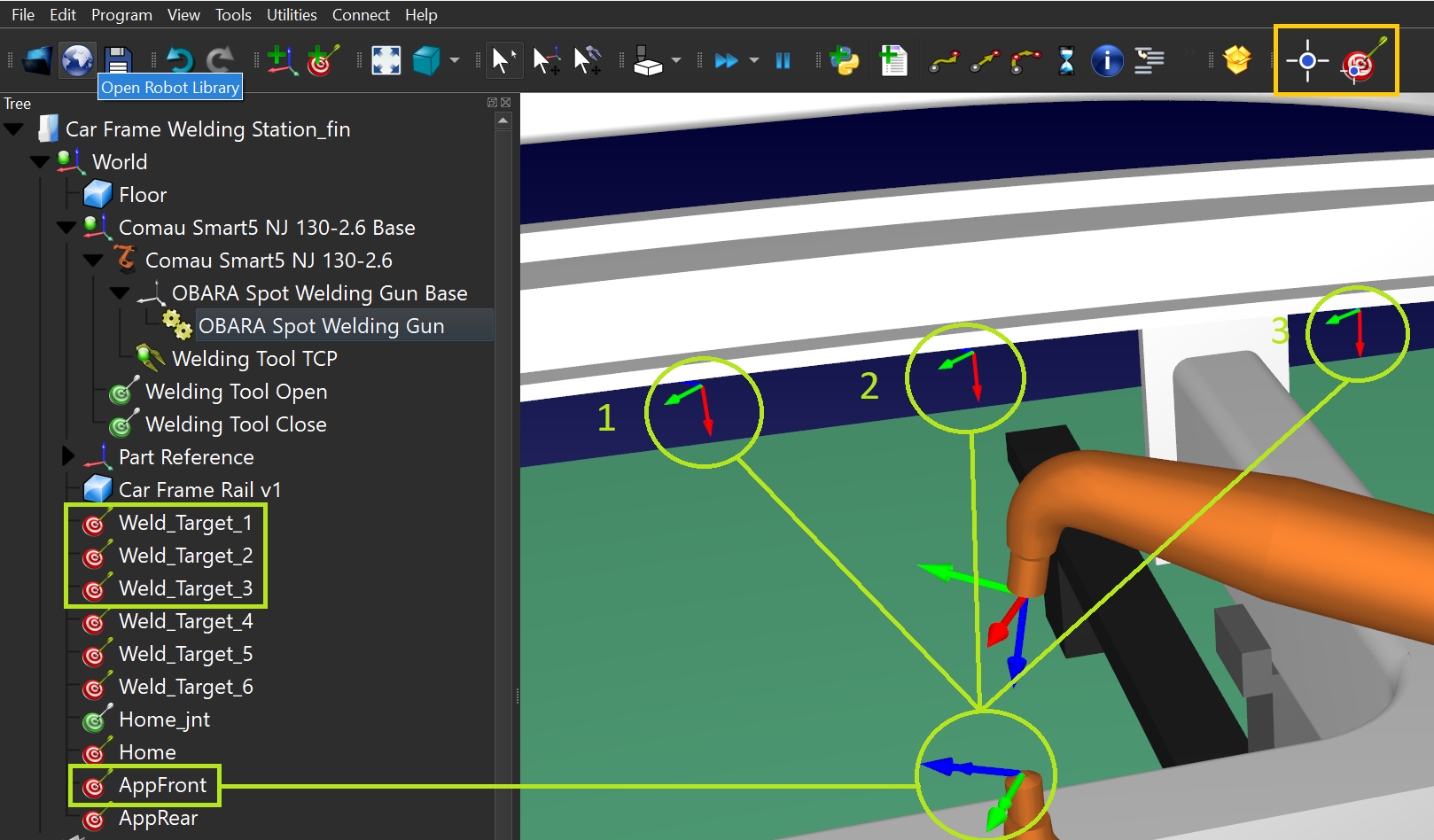
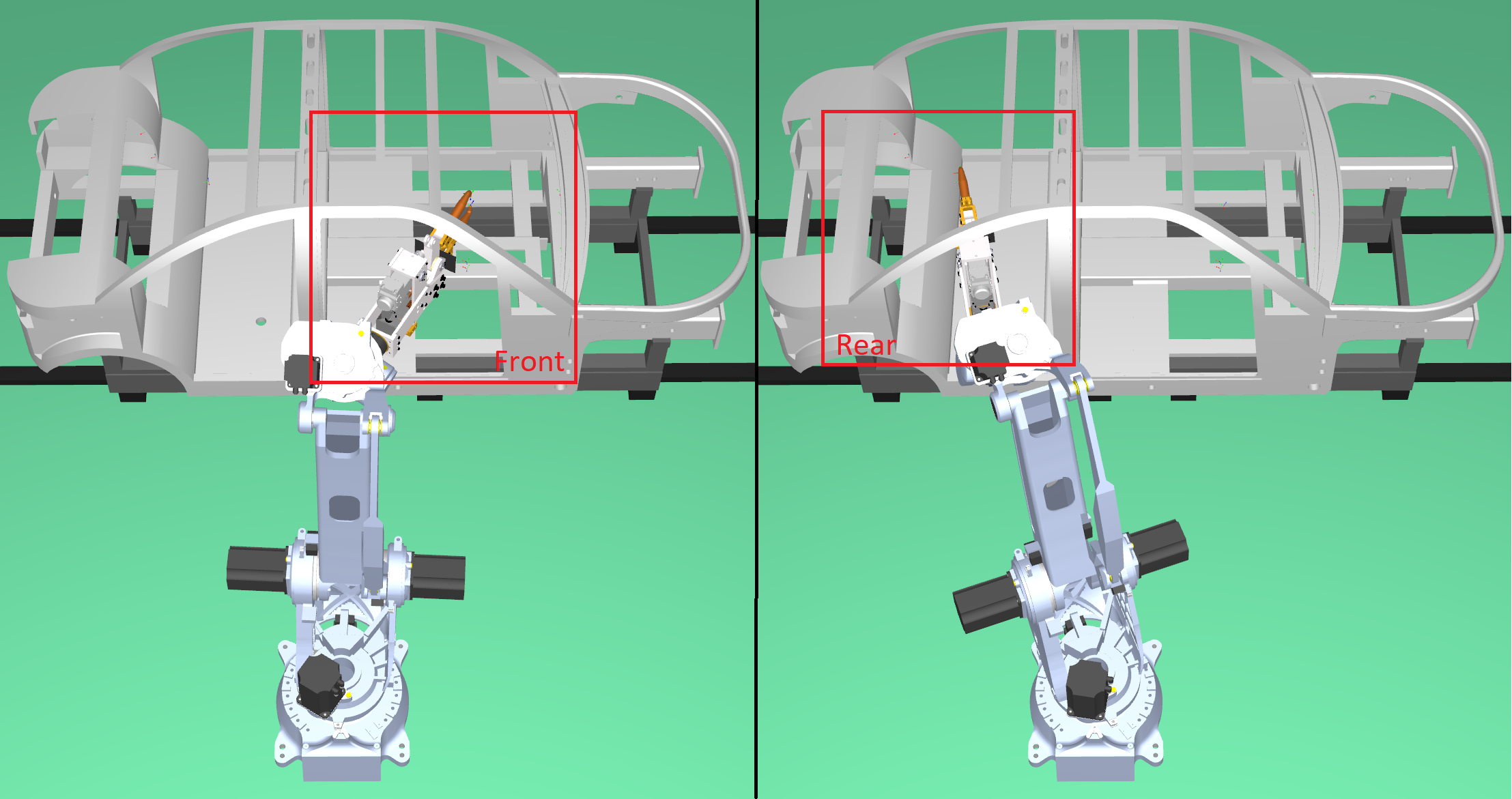
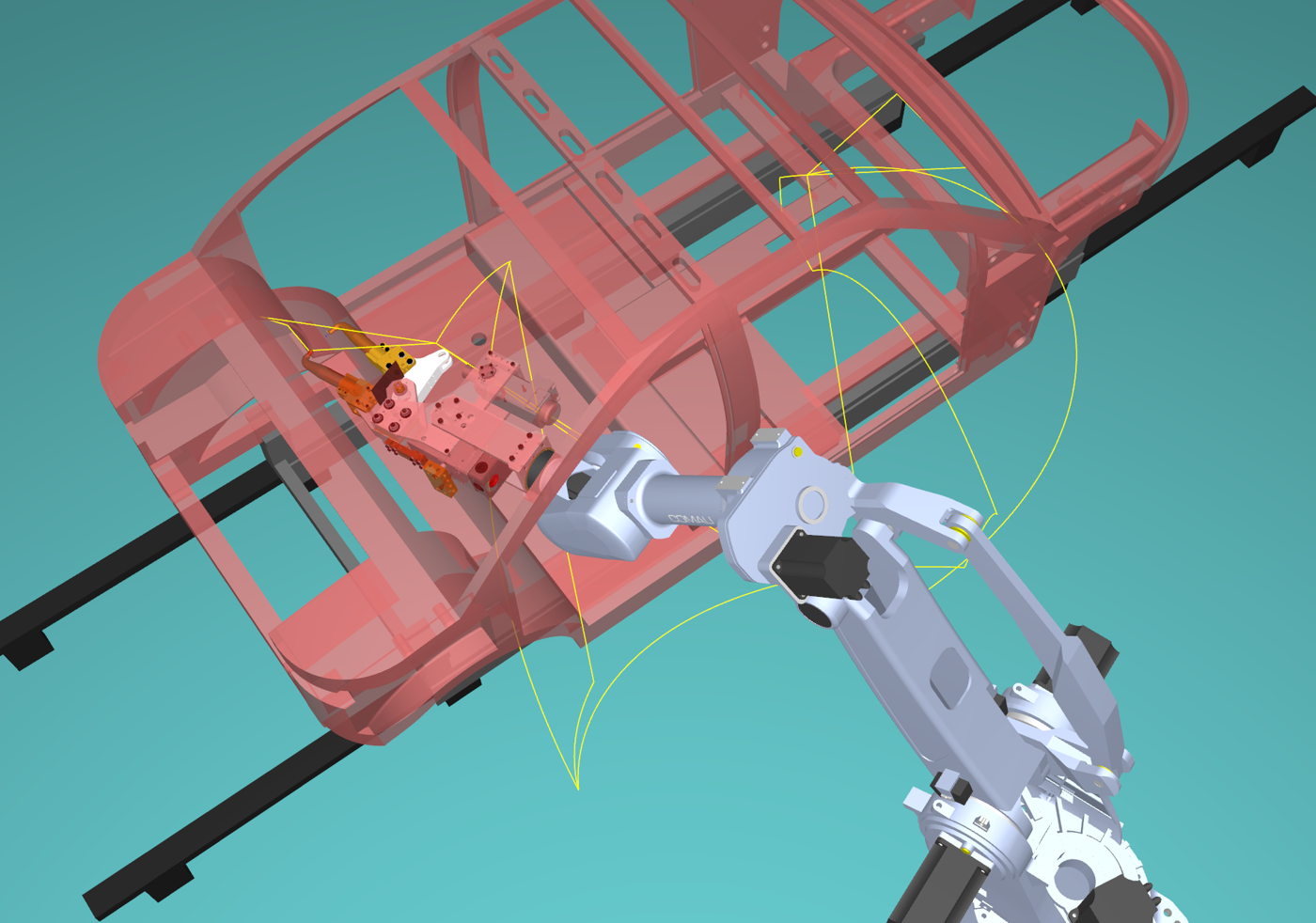
Pianificazione della traiettoria
Questa sezione mostra come può creare un percorso senza collisioni tra 2 punti all'interno del telaio dell'auto.
Il telaio del veicolo ha una trave di forza che impedisce un facile accesso dalla parte anteriore a quella posteriore, è necessario creare due bersagli di avvicinamento che permettano di passare all'interno del telaio.
Dobbiamo anche creare un bersaglio intermedio tra i due bersagli di avvicinamento. Possiamo creare dei bersagli di avvicinamento in base alla posizione dell'utensile per i bersagli di saldatura a punti.
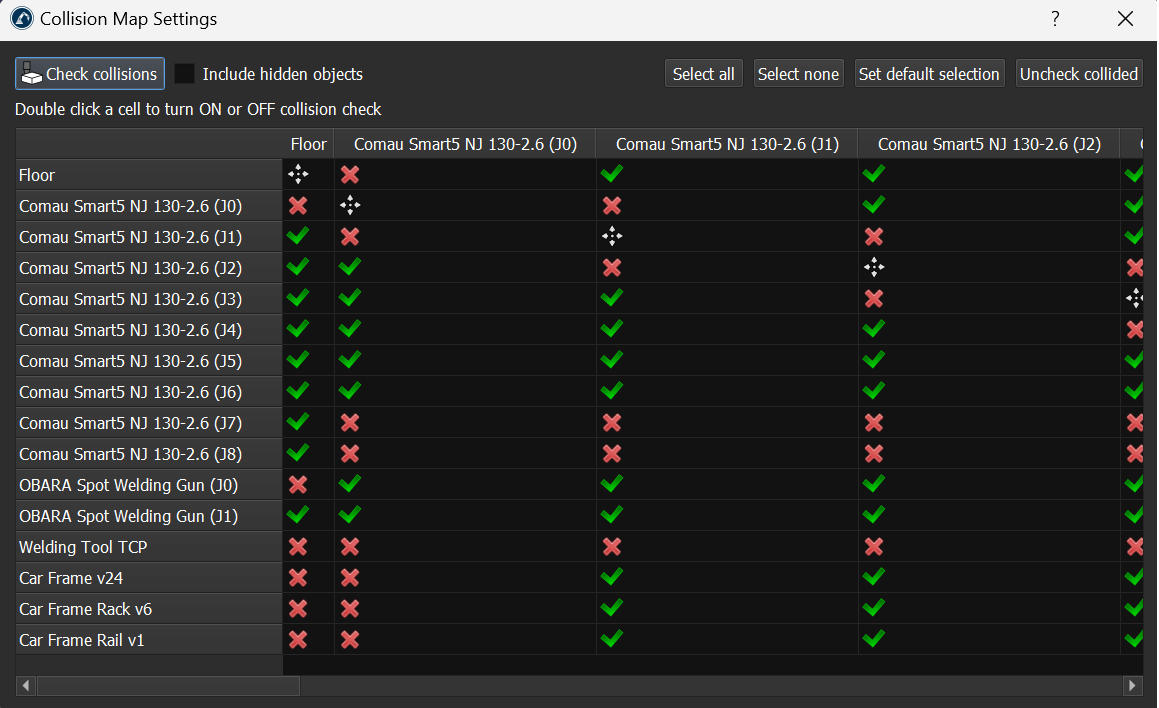
Rilevamento delle collisioni
Una volta ottenuto un percorso, può verificare se ci sono collisioni e assicurarsi di aver definito correttamente la mappa di collisione.
Può verificare se alcune parti entrano in collisione selezionando StrumentiàVerifica collisioni. Questo attiva/disattiva il rilevamento delle collisioni.
Può quindi configurare la mappa di collisione selezionando Strumenti->Mappa di collisione.
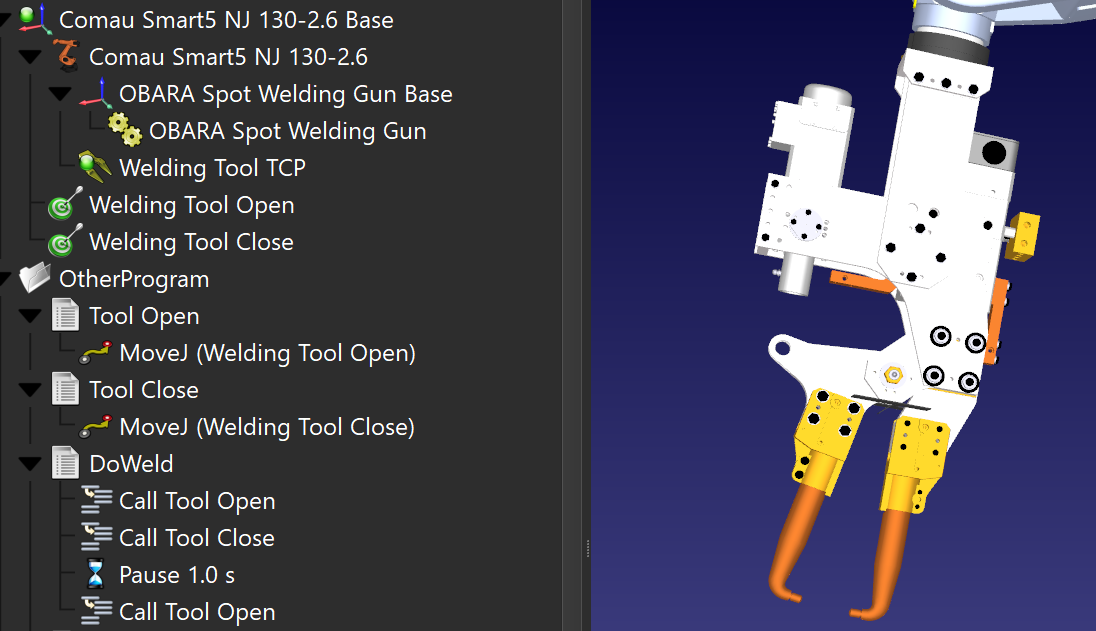
Sequenza di programmi
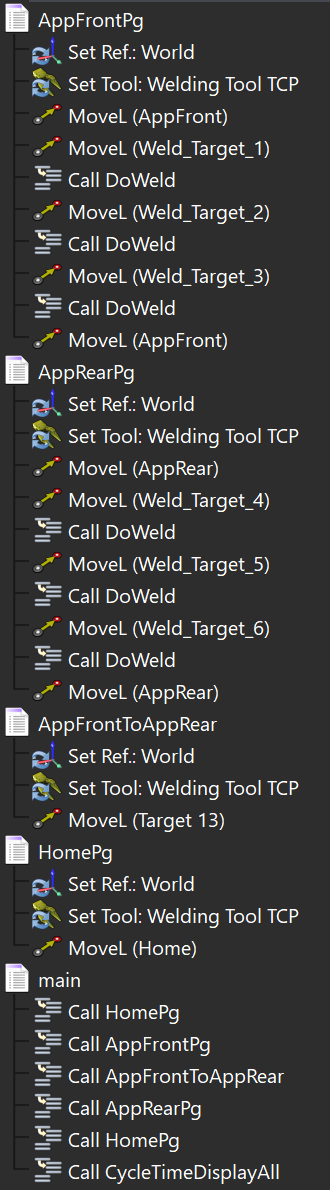
Questa sezione la aiuta a creare la sequenza di saldatura a punti suddivisa in un programma principale e in programmi secondari, per mantenere organizzata la simulazione e i programmi generati.
È buona norma suddividere la simulazione in diversi programmi, per renderla più comoda per modifiche future e/o per la collaborazione del team. Per questa stazione, utilizziamo un programma principale con diverse routine:
Stima del tempo di ciclo
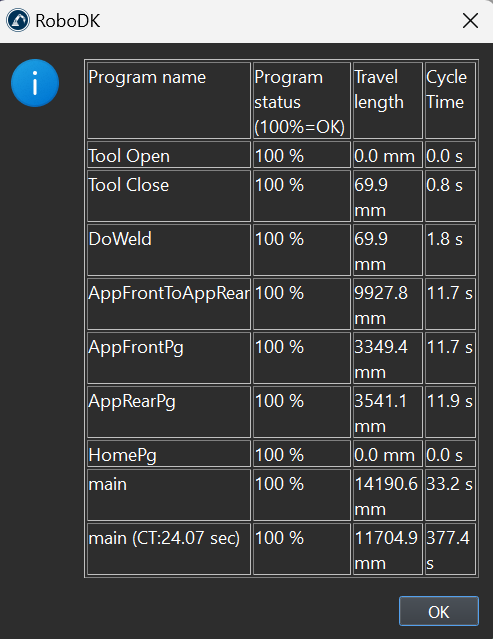
Questa sezione mostra come può calcolare e visualizzare la stima del tempo di ciclo della simulazione di saldatura a punti.
Può facilmente aggiungere la stima del tempo al suo programma, semplicemente caricando lo script CycleTimeDisplayAll.py dalla cartella C:\RoboDK\Library\Scripts. Può quindi chiamarlo dal programma principale:
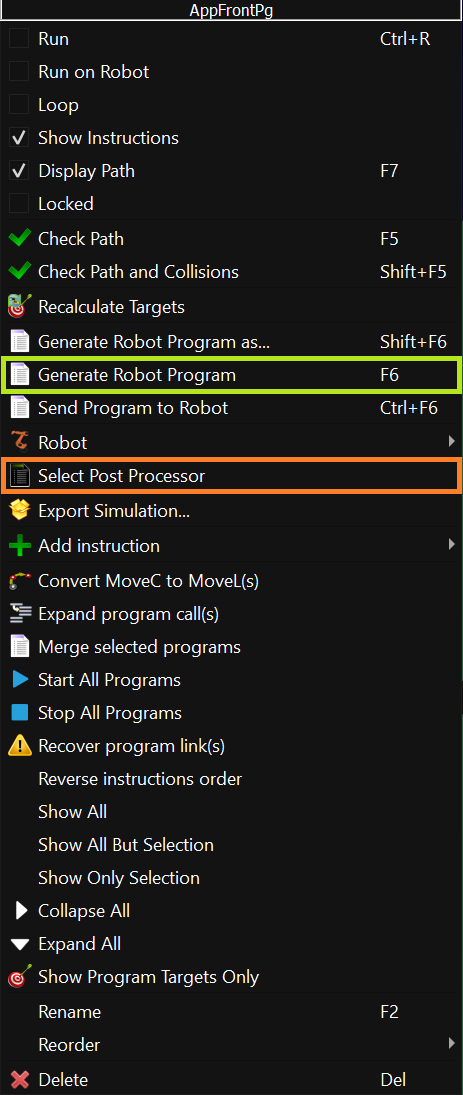
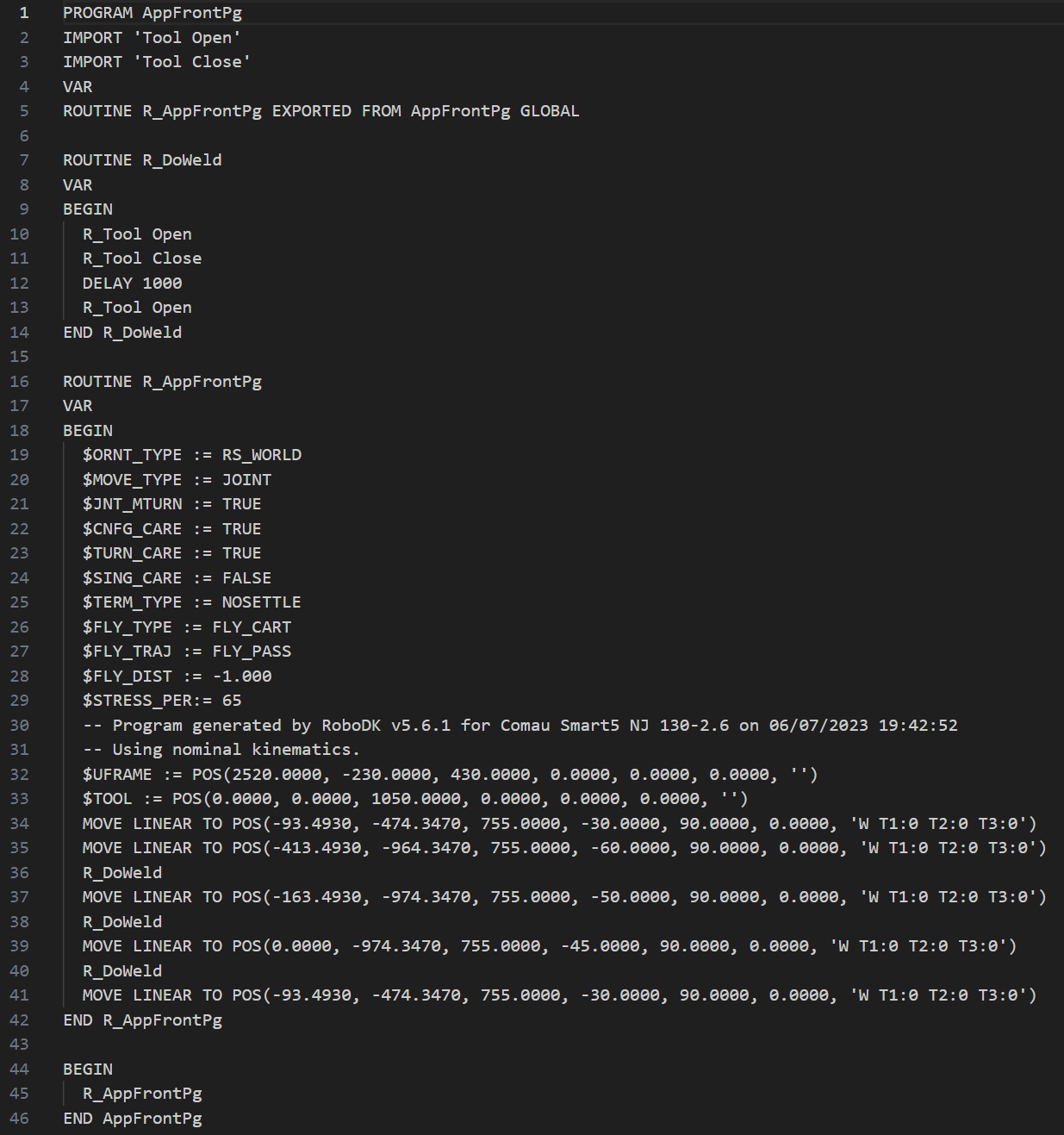
Genera il programma del robot
Una volta ottenuta una sequenza di simulazione valida per la sua applicazione di saldatura a punti, può generare il programma con pochi clic.
Selezioni il programma che desidera generare per il suo robot facendo clic con il pulsante destro del mouse sul programma e selezionando Genera programma robot.