Robot Welding
Introduzione
Questo esempio le mostrerà come utilizzare il plugin RoboDK per SolidWorks. L'esempio include una tavola e 2 ferri angolari per mostrarle come può utilizzare la funzione di RoboDK per migliorare i suoi percorsi di saldatura.
Con il plug-in RoboDK per SolidWorks, può programmare facilmente un robot industriale per la saldatura. Questo esempio include un tavolo e 2 ferri angolari per mostrarle come può utilizzare RoboDK per migliorare i suoi percorsi di saldatura.
Esempio di saldatura robotica
Per realizzare questo progetto di saldatura di robot, deve prima selezionare l'esempio di saldatura di robot RoboDK nella libreria predefinita. Poi dovrà selezionare i percorsi/schizzi di saldatura in SolidWorks. Poi dovrà regolare il percorso del robot in RoboDK.
Impostazione
Deve prima importare la parte e i percorsi di saldatura da SolidWorks.
Importare il progetto da SolidWorks:
1.Vada alla scheda RoboDK in SolidWorks e selezioni Impostazione automatica.
2.Selezionare i percorsi di saldatura. Si assicuri di selezionare anche le facce, perché aiutano a orientare l'utensile del robot.
3.Ora che ha importato il percorso da SolidWorks, può passare a RoboDK.
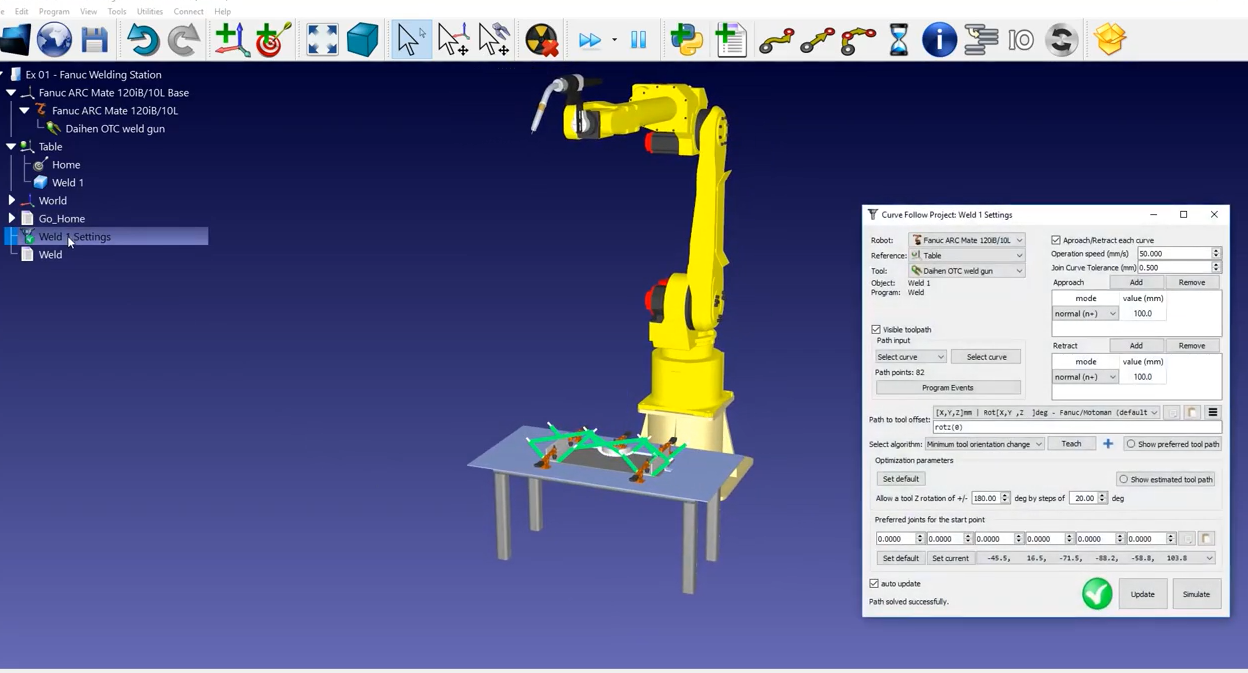
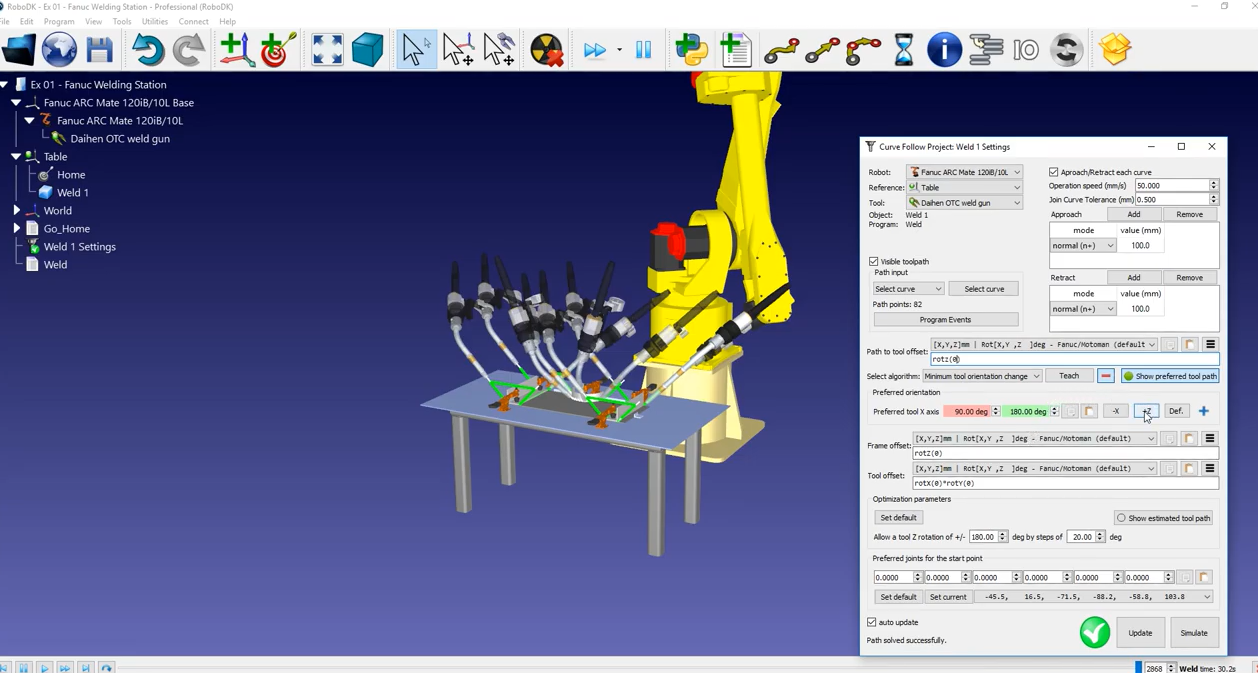
4.Nella struttura della stazione, faccia clic su Impostazioni Weld1, che aprirà il Progetto Curve Follow.
5.Clicchi su Aggiorna per generare il programma e poi su Simula.
Schizzo 2D da SolidWorks
In questa sezione imparerà come migliorare o personalizzare l'ordine di movimento per ogni curva di saldatura. La pistola di saldatura segue il percorso come dovrebbe. Tuttavia, possiamo notare che l'orientamento è un po' sbagliato e che il percorso è lontano dall'essere ottimale.
Per prima cosa, dovrebbe sistemare il percorso stesso:
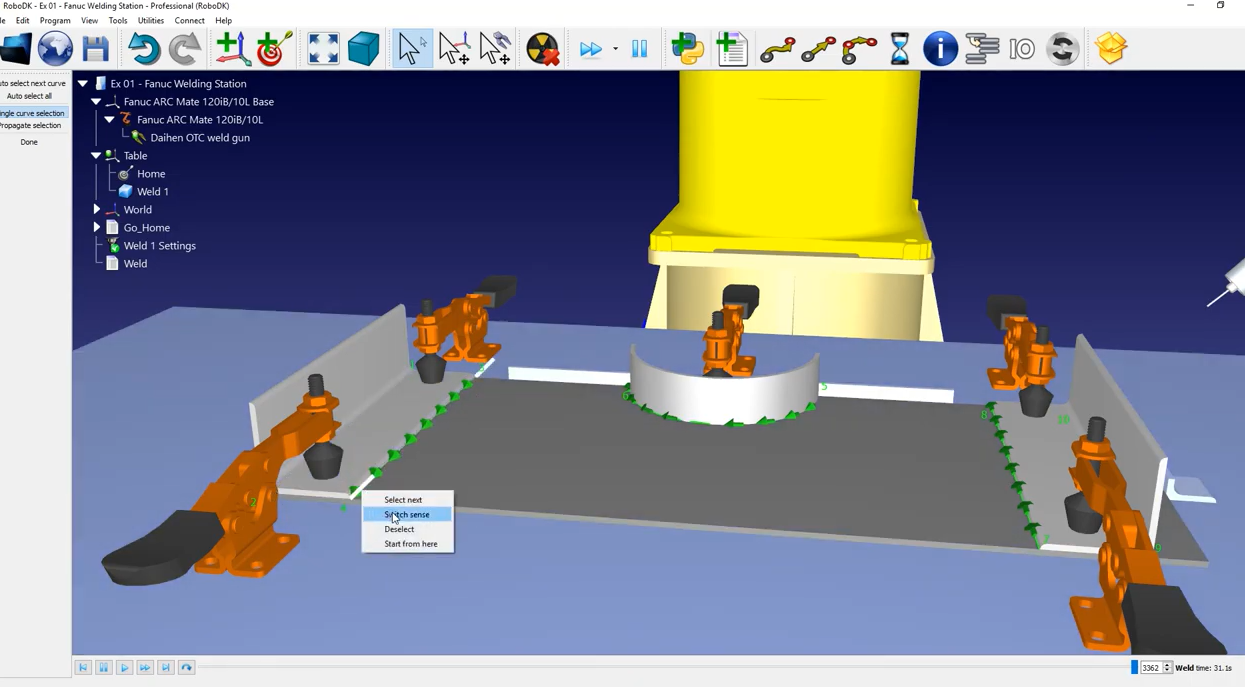
1.Nel Progetto Curve Follow, faccia clic su Seleziona curva (passando da 1 a 2, poi da 3 a 4, da 5 a 6, da 7 a 8 e da 9 a 10).
2. L'ordine delle sezioni di saldatura ha senso. Tuttavia, la direzione di saldatura non sembra avere senso.
3.Per cambiare la direzione di un percorso di saldatura (come il percorso 3 a 4), clicchi con il tasto destro del mouse sul percorso e selezioni Inverti direzione - può vedere che le frecce di quel percorso hanno cambiato direzione.
4.Può fare lo stesso per il percorso 5-6 e per il percorso 7-8.
5.Una volta terminate le modifiche, può selezionare Fatto nella finestra di destra.
6.Clicchi su Aggiorna per generare il programma e su Simula per avviare la simulazione.
Ora che l'ordine dei percorsi sembra avere più senso, può regolare l'orientamento dell'utensile lungo il percorso per migliorare il movimento del robot.
7.Nel menu Curva Segui progetto, clicchi su Mostra percorso utensile preferito. Apparirà una serie di strumenti fantasma per mostrare l'orientamento dell'utensile in diverse posizioni lungo il percorso.
8.La prima opzione di orientamento dell'utensile che può provare è l'offset da tracciato a utensile intorno all'asse "Z". Per farlo, può inserire manualmente un valore o posizionare il mouse su di esso e utilizzare la rotella di scorrimento per aumentare o diminuire il valore.
9.In questo modo, può vedere l'orientamento dello strumento fantasma che cambia.
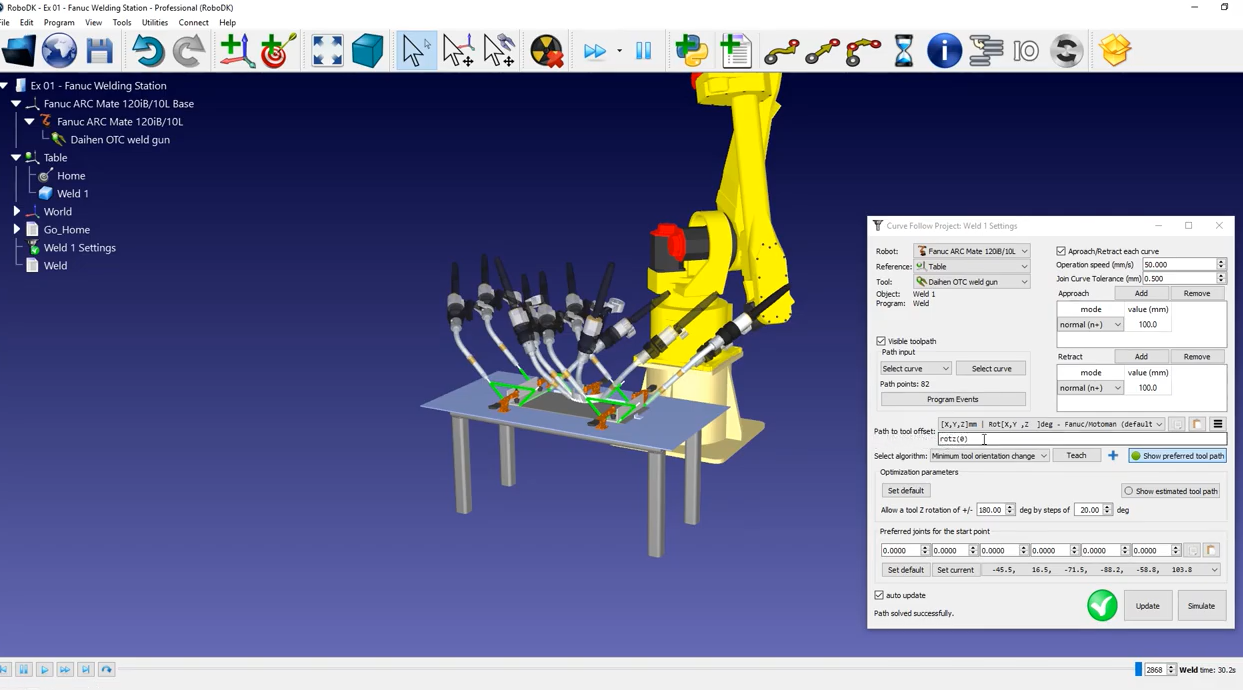
In questo caso, l'opzione di base non sembra risolvere il nostro problema. Fortunatamente, può disporre di più opzioni con cui lavorare; può rivelarle cliccando sul pulsante blu più e modificarle in base al suo progetto.
10.Può modificare la rotazione intorno all'asse Z (rotz) al suo valore originale, zero, e poi cliccare sul pulsante "+Z".
11.Come può vedere con gli strumenti fantasma, la flangia del robot sarà sempre in cima alla parte. Clicchi su Aggiorna e poi su Simula per simulare il risultato.
12.Se utilizza la barra di scorrimento, il nuovo orientamento dell'utensile facilita la gestione dei cavi dell'utensile; non c'è il rischio di interferire con il robot.
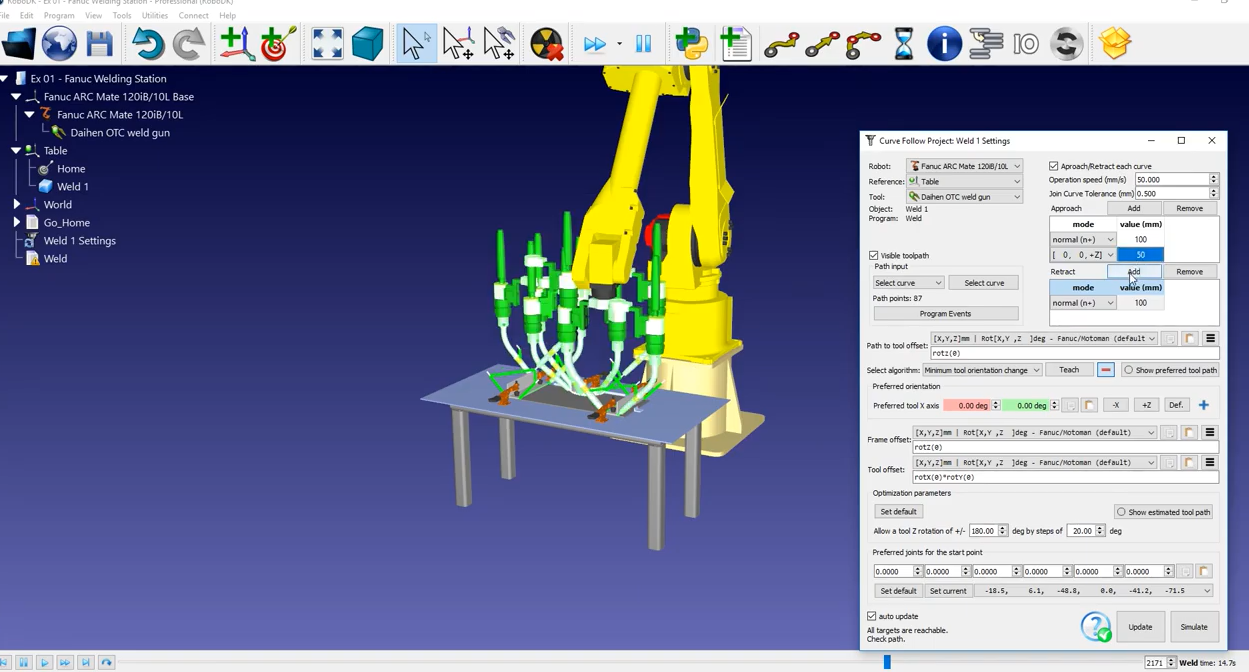
I movimenti di avvicinamento e ritrazione sono particolarmente importanti per evitare collisioni tra l'utensile e il pezzo. Il Progetto Curve Follow crea automaticamente un avvicinamento e un arretramento per ogni percorso di saldatura. Per impostazione predefinita, questi movimenti sono lunghi 100 mm e sono normali al percorso di saldatura.
Per evitare collisioni, può modificarli in modo che siano lunghi 200 mm e mantengano lo stesso orientamento.
In alternativa, può aggiungere un ulteriore movimento di avvicinamento lungo l'asse Z del sistema di coordinate:
1.Rimetta l'approccio normale predefinito di 100 mm.
2.Aggiunga un movimento, ad esempio, lungo Z.
3.Lo imposti a 50 mm.
4.Premere Aggiorna e Simula una volta terminato.
5.Ora il robot si ritrae in modo normale rispetto al percorso di saldatura e poi in modo rettilineo.