Allineare riferimenti robot
Questa sezione spiega come due o più robot possono essere programmati offline condividendo piani di riferimento comuni.
In una tipica applicazione offline, la posizione dell'oggetto è aggiornata con rispetto del robot. Tuttavia, quando due o più robot usando la stessa applicazione, la posizione di ogni robot deve essere aggiornata con rispetto di un riferimento in comune (un oggetto od un piano).
Segui questi passi per aggiornare la posizione di due o più robot con rispetto di un piano di riferimento:
1.Assicurarsi che i piani di riferimento dei robot e il piano di riferimento dell'oggetto non dipendano l'uno dall'altro. Se c'è una dipendenza dobbiamo posizionare i piani di riferimento connessi all'elemento stazione.
2.Aggiungi un piano di riferimento connesso ad ognuna delle basi di riferimento come dovessi definire un nuovo piano di riferimento per ogni robot (Real Ref. A e Real Ref. B).
3.Questo piano di riferimento rappresenterà la posizione reale della parte con rispetto di ogni robot.
4.Calibrare ognuno dei piani di riferimento (Real Ref. A e Real Ref. B), separatamente, utilizzando la procedura di calibrazione standard (per esempio il medoto 3 punti)
A questo punto vedremo 3 piani di riferimento che dovrebbero coincidere, ma coincidono. Il piano di riferimento di ogni robot deve essere aggiornato per sistemare questo problema:
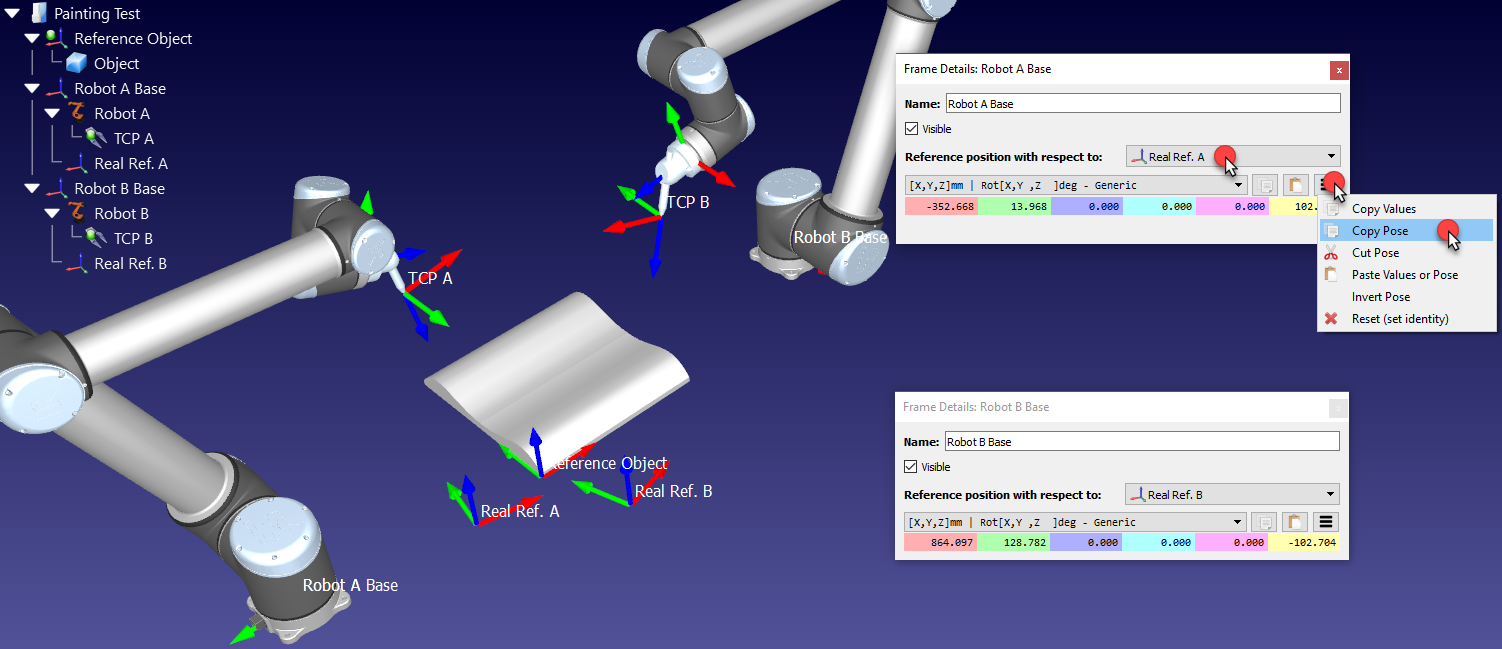
5.Fare doppio click su uno dei piani di riferimento dei robot, ad esempio Robot A Base per aprire la finestra.
6.Copiare la posizione del riferimento della base con rispetto del riferimento calibrato del robot (Real Ref. A) selezionando il pulsante copia.
7.Nella stessa finestra, cambiare la Posizione del riferimento con rispetto di (tendina) in Oggetto Riferimento
8.Incollare la posizione copiata. Il robot si sposterà e Real Ref. A coinciderà con il Riferimento dell'oggetto.
9.Ripetere i passaggi 4-7 di questa procedura per ogni robot
Alla fine di questa procedura tutti i piani di riferimento dovrebbero combaciare e la relazione tra i riferimenti calibrati e i riferimenti oggetto dovrebbe essere la stessa.