Il TCP, o robot Tool Center Point, è il punto usato dal robot per posizionarsi ed è usato in ogni programma robot che utilizza bersagli definiti nello spazio Cartesiano. Il TCP viene definito come una trasformazione dalla flangia del robot. Definire il TCP è molto importante in ogni applicazione robot sia essa Offline o no.
Seguire questi passi per calibrare un tool robot (o Tool Center Point, o TCP):
1.Seleziona Utilità➔ Calibra Piano Tool (TCP)
2.Seleziona il Tool da calibrare. In alternativa, clicca con il tasto destro su di un tool e seleziona Calibra TCP
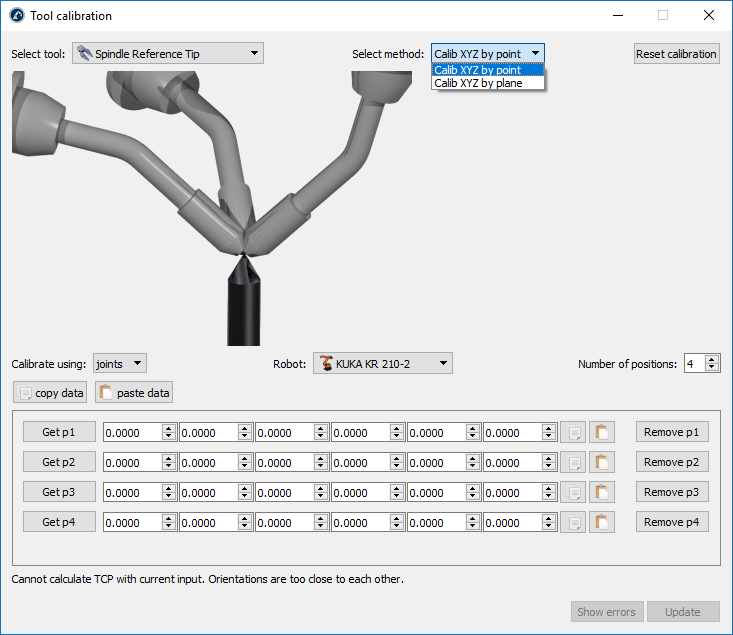
3.Seleziona il metodo:
a.Tocca un punto con la punta del TCP, utilizzando diversi orientamenti del tool (Calib XYZ da punto)
b.Tocca un piano con il TCP, utilizzando diversi orientamenti del tool (Calib XYZ da piano). Il TCP può essere un punto o una sfera.
Nota: Toccare lo stesso punto utilizzando diversi orientamenti (primo metodo) è lo stesso metodo disponibile sulla maggior parte dei controllori robot. Utilizza RoboDK per avere una migliore idea degli errori.
Nota: Se è necessario calcolare il centro di una sfera è raccomandato utilizzare un piano per calcolare il TCP. Questo metodo ne calcola automaticamente il centro.
4.La calibrazione del TCP utilizza i valori dei giunti di default. Modificala in pose se hai bersagli Cartesiani.
Importante: Se il TCP è calibrato utilizzando pose, la posizione della flangia del robot deve essere fornita come una posa (posizione ed orientamento) con rispetto della base del robot o di un piano di riferimento. Più informazioni su come fornire questi valori nelle sezione Piani di Riferimento.
Suggerimento: È possibile utilizzare più di 3 o 4 configurazioni per calibrare il TCP. Questo permette di ottenere risulatati più accurati e fornisce una buona stima dell'errore del TCP. È raccomandato utlizzare 8 punti o più per definire accuratamente un TCP, o 3 punti se la precisione non è importante.
5.Seleziona il robot se più robot sono disponibili.
6.Modifica il numero di punti che vuoi utilizzre per calibrare il TCP. Questo valore può anche essere modificato in seguito.
7.Inizia a riempire la tabella con le configurazioni misurate (valori giunti o posizioni ed orientamenti della flangia)
Suggerimento: La lista di configurazioni può essere riempita manualmente o utilizzando il pulsante copia/incolla (sulla destra di ogni linea)
Importante: È raccomandato fornire ogni valore giunto con almeno 4 decimali (per i valori giunti). Il numero di numeri decimali permesso può essere modificato in Strumenti➔Opzioni➔Accuratezza➔Max Decimali.
Suggerimento: È anche possibile selezionare Ottieni p1 per ottenere i valori dei giunti da un robot reale su RoboDK. Se i driver sono stati configurati correttemente è facile ottenerne la posizione dal PC. Più informazioni disponibili nella sezione Drivers Robot.
Importante: È raccomandato tenere una copia separata dei valori forniti. Seleziona Copia dati e Incolla dati per copiare/incollare tutti i contenuti.
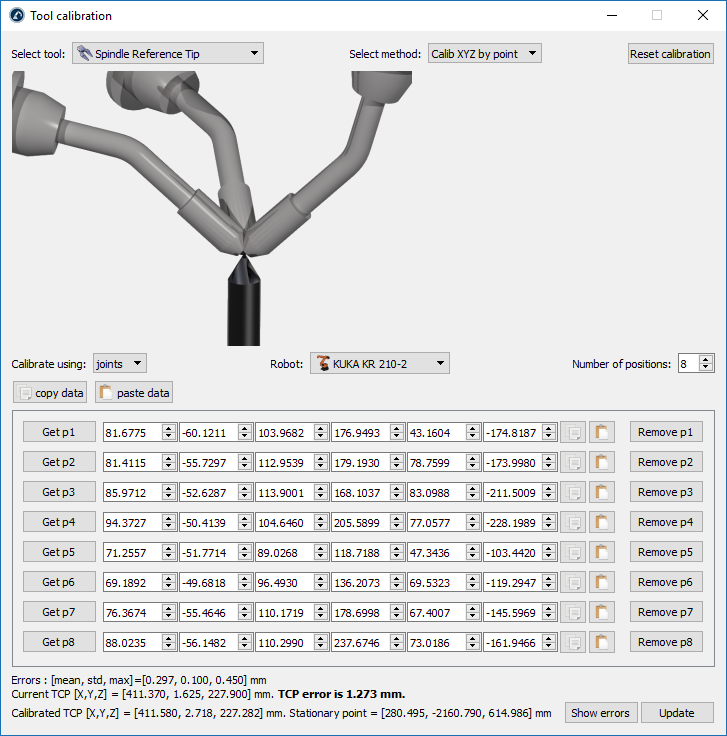
8.Infine, seleziona Aggiorna per aggiornare il TCP nella Stazione RoboDK. L'errore del TCP sarà aggiornato a 0 mm.
Nota: Il TCP è calcolato automaticamente una volta che i valori sono stati immessi.
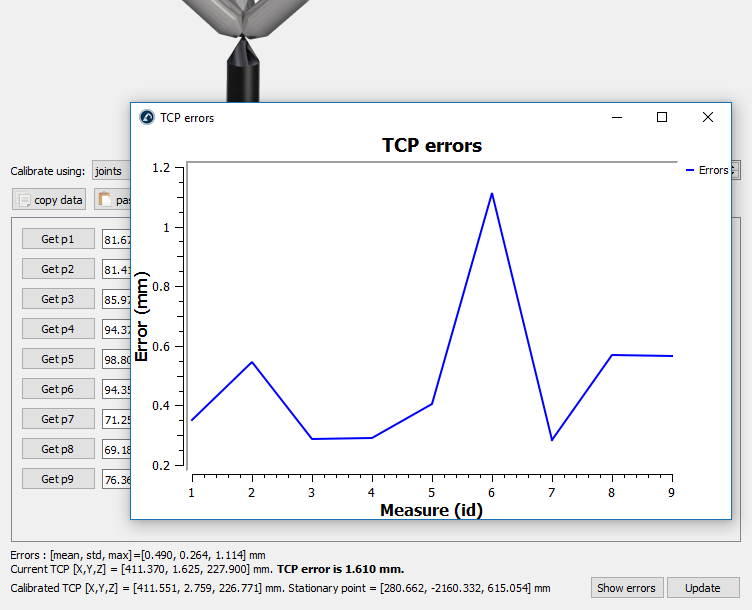
Suggerimento: Alcune utili statistiche sull'errore sono fornite, come l'errore medio, la deviazione standard e l'errore massimo. Seleziona Mostra errori per visualizzare un grafico con gli errori per ogni punto e la media calcolata. Dato che questo metodo introduce operazioni manuali è comune introdurre errori in punti specifici. Per isolare questi errori puoi cancellare i punti che mostrano un errore troppo grande rispetto alla media.
Ad esempio, l'immagine seguente mostra gli errori prima che il punto 6 sia cancellato selezionando Rimuovi p6.