Sincronizza Asse Esterno
È possibile sincronizzare un braccio robotico on assi esterni. Assi esterni possono essere semplicamente utilizzati come posizionatori o possono essere sincronizzati con lo stesso controller del robot. Quando assi esterni sono sincronizzati il robot e l'asse possono muoversi assieme mantenendo movimenti lineari accurati relativi ai percorsi programmati. Non tutti i controller robot supportano la sincronizzazione con assi esterni.
Per sincronizzare un braccio robotico con un asse estero:
1.Costruisci una stazione RoboDK posizionando il robot e l'asse nella loro posizione
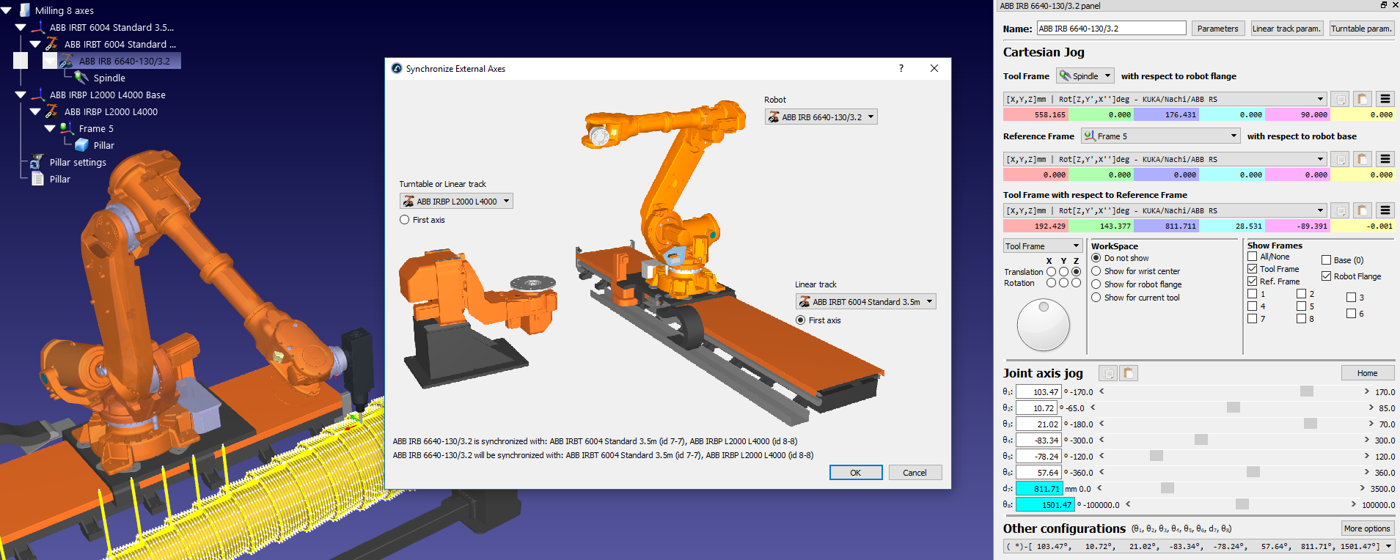
2.Seleziona Utilità➔Sincronizza Asse Esterno
3.Seleziona il robot e la tavola girevole/asse lineare sarà disponibile per essere sincronizzata
4.Seleziona OK. Un nuovo pannello si aprirà mostrando gli assi addizionali in blu
Bersagli relativi al robot sincronizzato mostreranno assi addizionali in blu. È possibile specificare la posizione preferita di un posizionatore quando il programma è generato. Bersagli cartesiani manterranno le loro coordinate cartesiane durante i movimenti lungo il percorso.
Ogni lavorazione di fresatura mostrerà opzioni addizionali per fornire la posizione preferita degli assi esterni. Inoltre, ogni movimento esportato dal post processore includerà la posizione degli assi esterni.