Aggiungere un piano di riferimento
Un piano di riferimento permette di posizionare oggetti con rispetto di un robot o con rispetto gli uni degli altri nello spazio 3D (includendo posizione ed orientamento).
Per aggiungere un nuovo piano di riferimento:
Seleziona Programa➔
In alternativa, seleziona il pulsante equivalente nella toolbar.
1.Fai doppio click sul piano di riferimento (nell'albero o sulla geometria 3D nella finestra principale) per inserire le coordinate mostrate nell'immagine (X,Y,Z per posizione e angoli di Eulero per orientamento). La rotella del mouse può essere utilizzata sopra ogni casella per aggiornare la posizione del piano di riferimento nella finestra principale.
I seguenti colori sono utilizzati di default:
●coordinata X ➔ Rosso
●coordinata Y ➔ Verder
●coordinata Z ➔ Blu
●primo angolo di Eulero ➔ Ciano
●secondo angolo di Eulero ➔ Magenta
●terzo angolo di Eulero ➔ Giallo
2.Seleziona Visualizza➔Ingrandisci piani di riferimento (+) per ingrandire la dimensione dei piani di riferimento
3.Seleziona Visualizza➔Rimpicciolisci piani di riferimento (-) per rimpicciolire la dimensione dei piani di riferimento
4.Selezione Visualizza➔Mostra/Nascondi testo sullo schermo (/) per mostrare o nascondere il testo sullo schermo
5.Come opzione, rinomina ciascun piano di riferimento o oggetto nell'albero selezionando F2
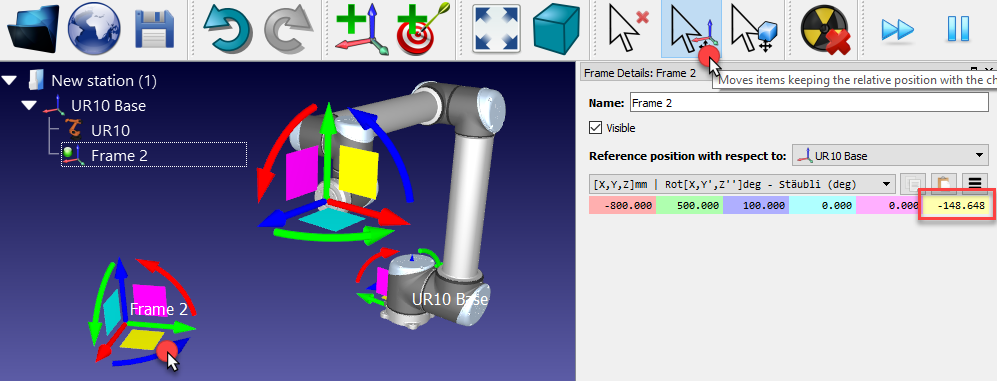
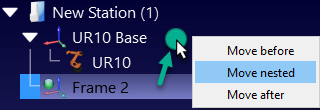
Se più di un piano di riferimento è utilizzato, è possibile trascinarlo all'interno dell'albero della stazione per far corrispondere la relazione che esiste nel setup reale. Ad esempio, il piano di riferimento Frame 2 può essere posizionato con rispetto della base del robot. In quel caso, se la base dell'UR10 viene spostata, Frame 2 è anch'esso spostato con esso. È importante considerare ciò se altri robot o piani di riferimento sono utilizzati. La prossima immagine mostra la differenza nelle relazioni.
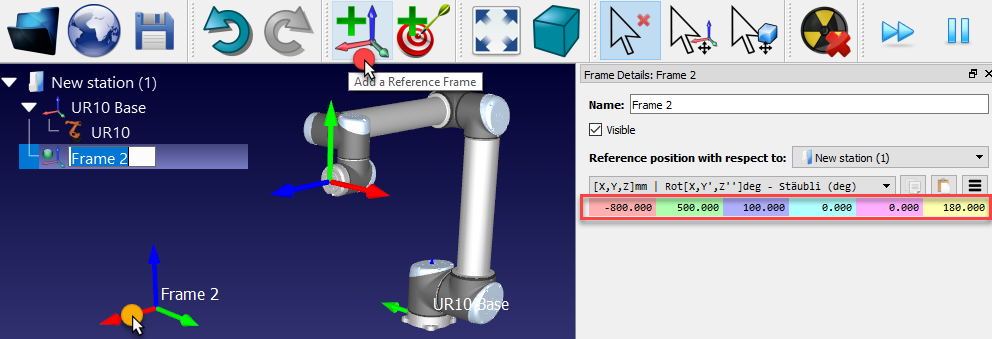
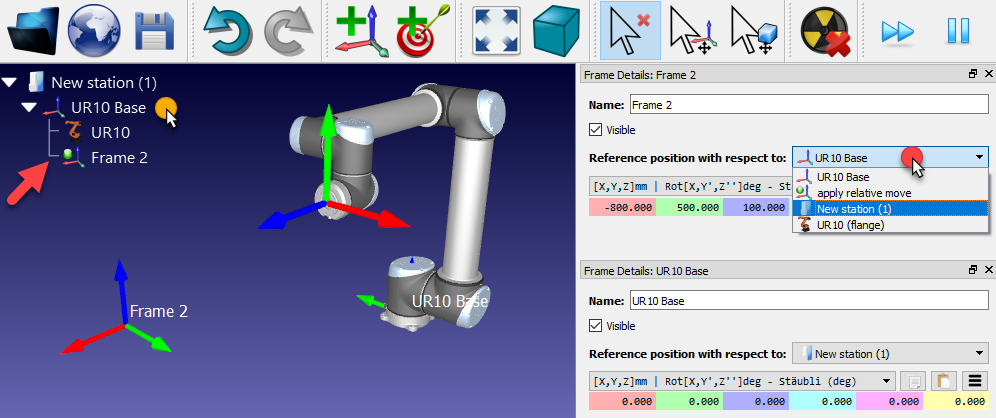
Anche se la relazione è diversa, è possibile inserire o recuperare le coordinate di ogni piano di riferimento con rispetto di altri, come mostrato nella prossima immagine. Molti controllori robot necessitano di coordinate del piano di riferimento con rispetto della base.
Piani di riferimento possono anche essere spostati nella finestra principale tenendo premuto Alt, o selezionando il pulsante corrispondente nelle toolbar