Aggiungi un Programma Ritrazione
In maniera simile alle precedenti operazioni:
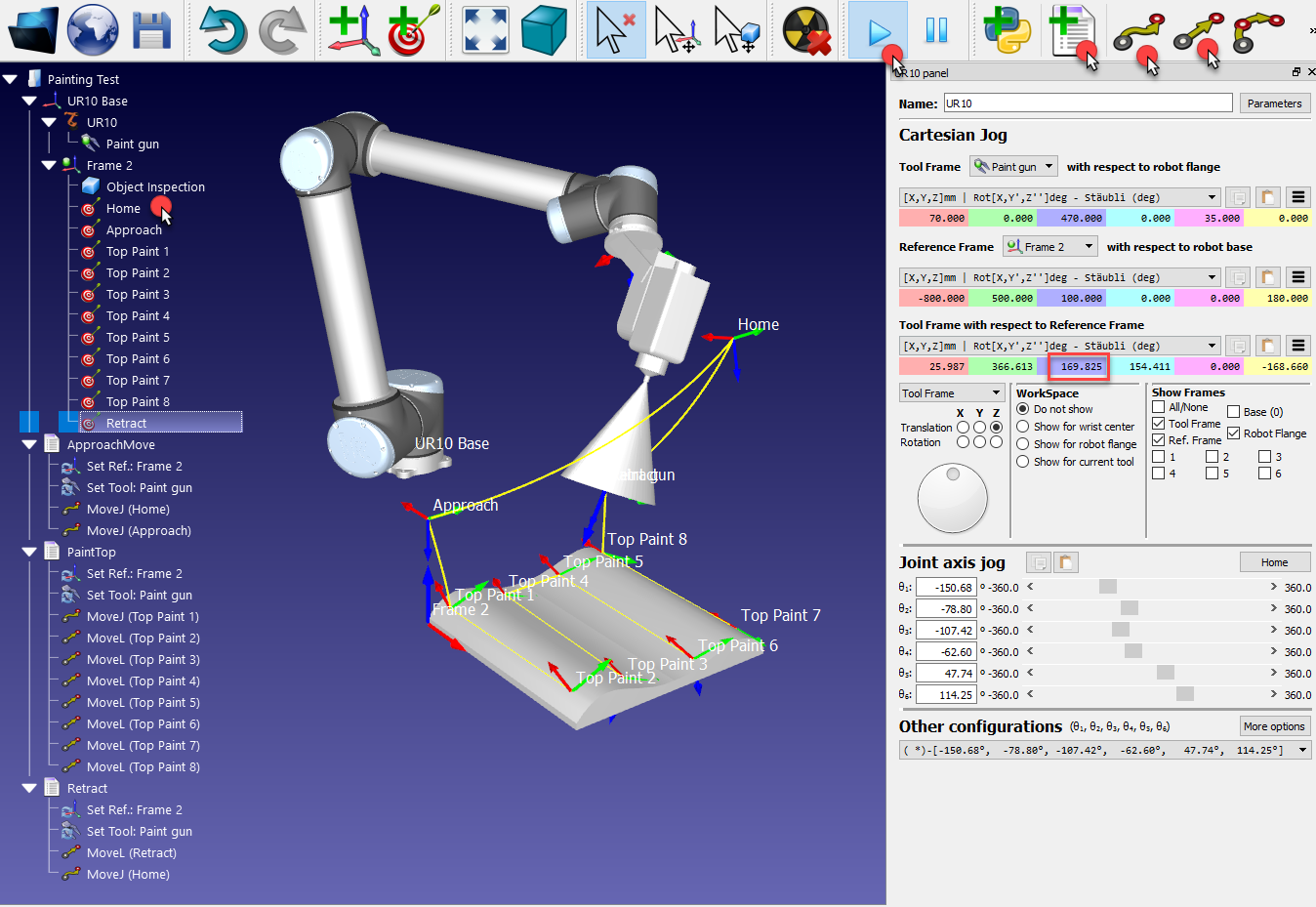
1.Con il robot posizionato su l'ultimo bersaglio, muovere il robot verso l'alto aumentando la coordinata Z del TCP con rispetto del piano di riferimento nel pannello robot (evidenziato nella prossima immagine)
2.Seleziona Programma➔
3.Seleziona Programma➔

4.Seleziona in bersaglio Home
5.Seleziona Programma➔
Simula ogni programma individualmente facendo doppio click. La simulazione può essere accellerata tenendo premuto la barra spaziatrice o selezionando il pulsante Simulazione Veloce