Crea Bersagli
Le posizioni del robot sono registrate come Bersagli. Segui questi passi per creare due bersagli come un nuovo bersaglio Home e un bersaglio approcio:
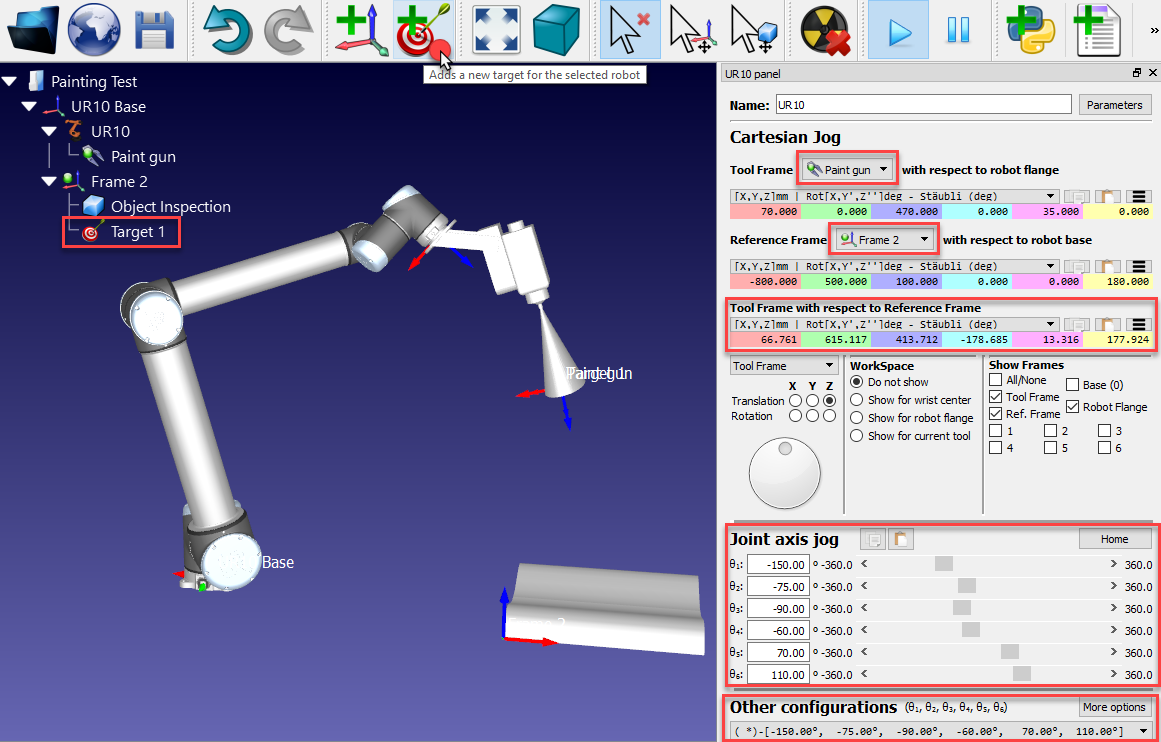
1.Fai doppio click sul robot per mostrare il pannello del robot
2.Seleziona Paint gun come Frame del Tool. Una volta che un tool o un piano di riferimento diventano attivi mostreranno un pallino verde.
3.Seleziona Frame 2 come Piano di Riferimento
4.Tieni premuto Alt e sposta il robot trascinandolo per il TCP o la flangia del robot in una posizione di sicurezza, senza collisioni con alcun'oggetto. In alternativa, muovere le coordinate del TCP con rispetto del piano di riferimento.
5.Utilizza la sezione Altre configurazioni per cambiare la configurazione del robot in modo da essere sicuri non sia troppo vicino ad un limite asse.
6.Seleziona Programma➔
In questo esempio, le coordinate giunti del robot utilizzate per il primo bersaglio sono: [-150, -75, -90, -60, 70, 110] gradi. Questi valori possono essere copiati come testi e 
7.Rinomina il primo bersaglio come Home premendo F2. In alternativa, seleziona Strumenti➔Rinomina oggetto
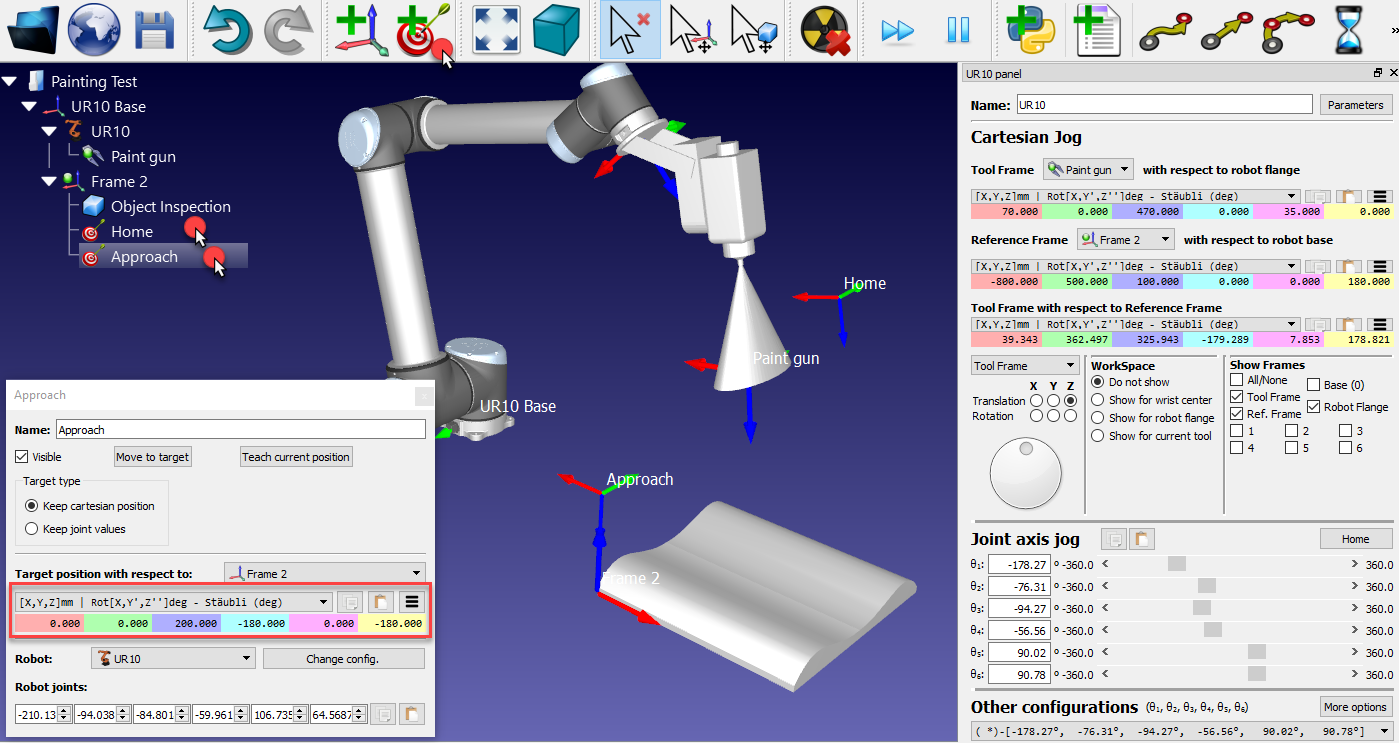
8.Sposta il robot vicino ad un lato della parte (trascinando il tool utilizzando il tasto Alt, immettendo le coordinate o muovendo gli assi manualmente)
In questo esempio utlizziamo i seguenti valori dei giunti [0,0,200,180,0,180] gradi.
9.Seleziona Programma➔
10.Rinomina il bersaglio in Approcio come mostrato nel passaggio 7
11.Seleziona il bersaglio Home e il bersaglio Approcio alternandoli per vedere il robot muoversi tra i due bersagli
12.Clicca con il tasto destro il bersaglio e seleziona Insegna Posizione Attuale (Alt+doppio click) se bisogna registrare una posizione diversa per uno dei bersagli
13.Clicca con il tasto destro il bersaglio e seleziona 
Se richiesto, fornire diversi valori per definire i bersagli.