Creare un TCP
Nuovi tool possono essere creati in RoboDK da file 3D precedentemente caricati:
1.Seleziona File➔
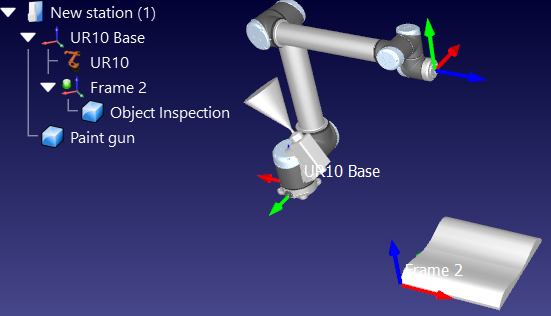
2.Seleziona il file Paint gun.stl per aggiungerlo come oggetto (sarà aggiunto al piano di riferimento della base)
3.Trascina l'oggetto sul robot della stazione come mostrato nella seguente immagine.
Nuovi tool possono essere caricati o salvati come formati .tool
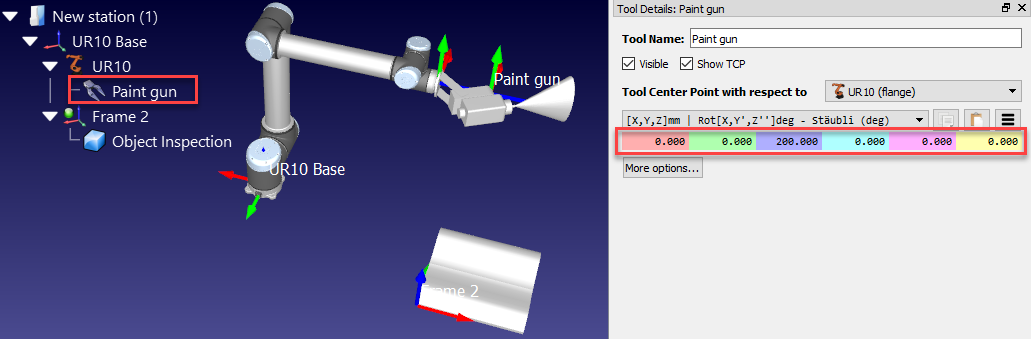
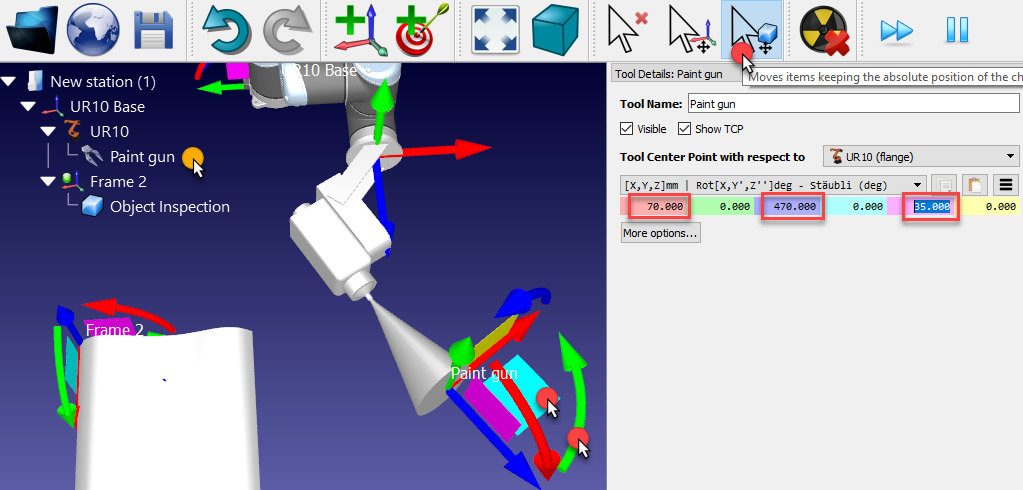
Di default, RoboDK definirà il TCP alla posizione [X,Y,Z]=[0,0,200] mm. Questo può essere cambiato immettendo le coordinate manualmente e/o muovendo il TCP tenendo premuto ALT+Shift come mostrato nella seguente immagine:
1.Tieni premuto ALT+Shift o seleziona il pulsante evidenziato dalla toolbar
2.Seleziona il piano azzurro (piano XZ del TCP) e trascina il TCP approssimatamente verso la superfice dello spray gun, come mostrato nella seguente immagine
3.Seleziona la freccia Verde (rotazione attorno all'asse Y) in modo che l'asse Z punti verso l'esterno
4.Una volta che una stima delle coordinate è stata ottenuta, è possibile modificare questi valori manualmente facendo doppio click sull'oggetto Paint gun. La rotella del mouse può essere usata sopra ogni casella per aggiornare automaticamente la posizione sulla finestra principale.
A questo punto la stazione può essere salvata:
1.Seleziona File➔
2.Salva il file come Paint Test.rdk. Il titolo della finestra e il nome della stazione saranno aggiornati
Per continuare, vai alla sezione creazione bersagli.
Imposta un TCP relativo
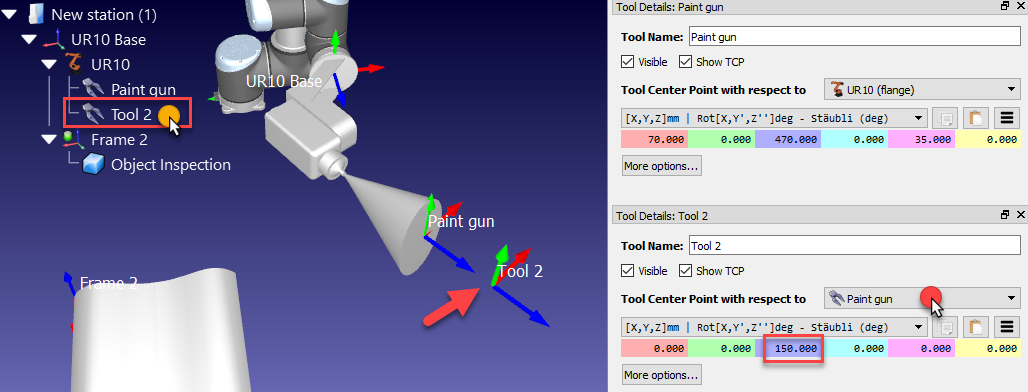
È possibile posizionare un secondo TCP con rispetto del primo, ad esempio, per definire un distanziale o per posizionare un cutter con rispetto di un TCP
Questi passaggi presuppongono un secondo TCP aggiunto con rispetto del primo a 150mm lungo l'asse Z:
1.Clicca con il tasto destro sul robot
2.Seleziona 
3.Fai doppio click nel nuovo TCP
4.Seleziona TCP con rispetto di ➔ Paint gun
5.Immetti la coordinata Z a 150 mm e imposta le altre traslazioni e rotazioni a 0.
Questo nuovo TCP relativo a quello precedentemente definito verrà rimosso nelle prossime sezione di questa dimostrazione.
Sposta la geometria del Tool
La geometria del tool può non essere allineata corretamente con rispetto della flangia del robot (adattatore del piano di riferimento) quando è caricato in RoboDK. I seguenti passaggi presuppongono che un errore sia compiuto e che il tool sia montato a 180 gradi attorno all'asse Z, quindi le seguenti correzioni devono essere applicate:
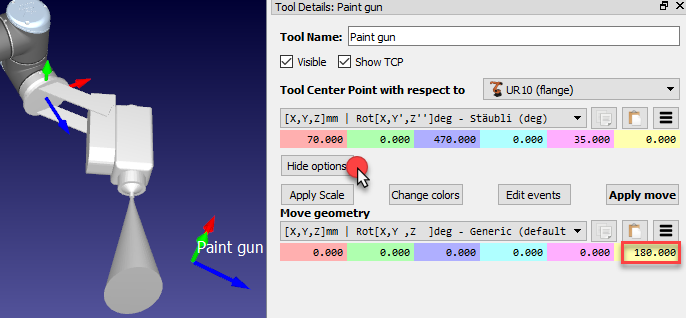
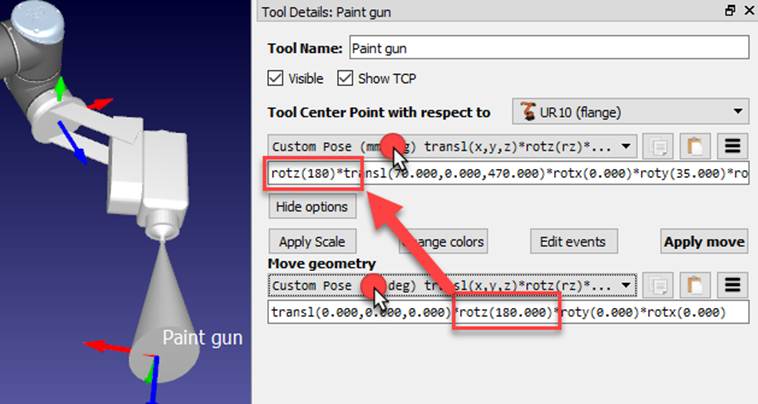
1.Seleziona Più opzioni nella finestra dettagli
2.Inserisci 180 nella casella gialla (rotazione Z) della geometria della paint gun, come mostrato nella seguente immagine.
La rotella del mouse può essere usata sopra ogni casella per aggiornare velocemente la posizione sulla finestra principale.